(54) МИКРОМАНИПУЛЯТОР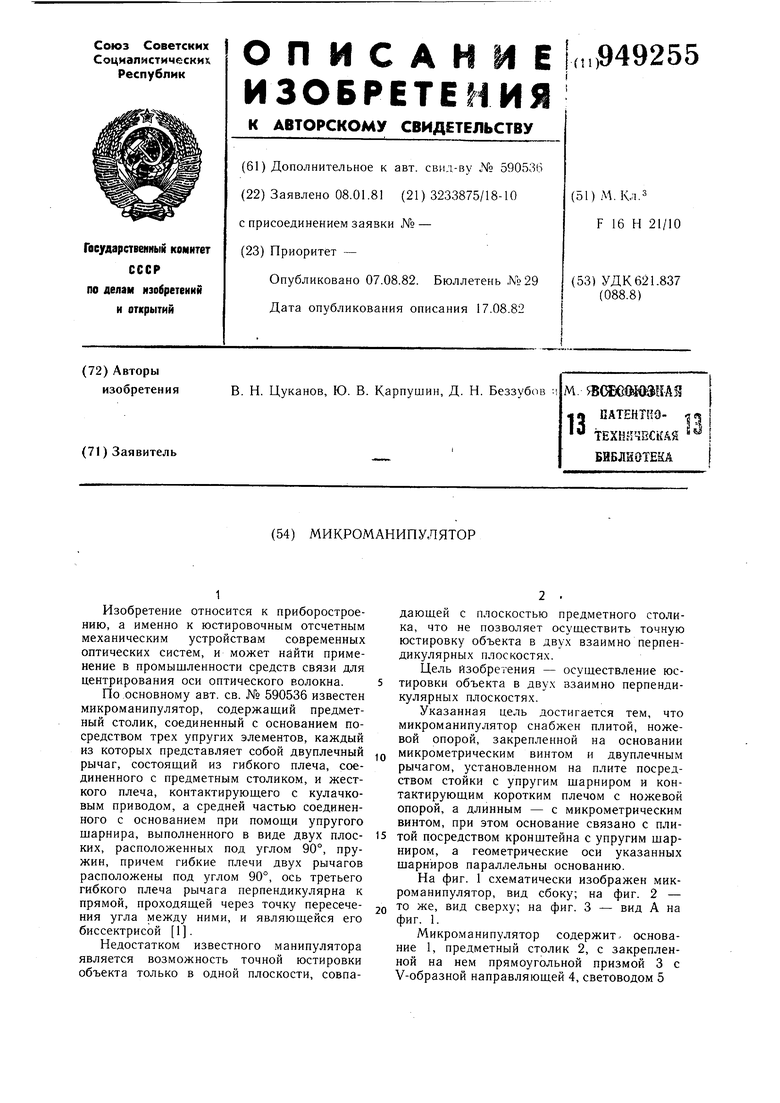

| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1976 |
|
SU590536A1 |
| Установка для микросварки проволочных проводников | 2021 |
|
RU2759103C1 |
| Устройство для соединения волоконного световода и интегральной оптической схемы | 1990 |
|
SU1714556A1 |
| ЮСТИРОВОЧНОЕ УСТРОЙСТВО | 2013 |
|
RU2541728C1 |
| ЛАЗЕРНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2005 |
|
RU2347184C2 |
| ШИРОКОДИАПАЗОННЫЙ НАНОПОЗИЦИОНЕР СФОКУСИРОВАННОГО ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 2015 |
|
RU2585928C1 |
| Микроманипулятор | 1972 |
|
SU441689A1 |
| Оптический отвес | 1989 |
|
SU1760316A1 |
| Устройство для сварки световодов | 1987 |
|
SU1490659A1 |
| Устройство для юстировки световолокна в наконечнике | 1989 |
|
SU1748126A1 |
1
Изобретение относится к приборостроению, а именно к юстировочным отсчетным механическим устройствам современных оптических систем, и может найти применение в промышленности средств связи для центрирования оси оптического волокна.
По основному авт. св. № 590536 известен микроманипулятор, содержащий предметный столик, соединенный с основанием посредством трех упругих элементов, каждый из которых представляет собой двуплечный рычаг, состоящий из гибкого плеча, соединенного с предметным столиком, и жесткого плеча, контактирующего с кулачковым приводом, а средней частью соединенного с основанием при помощи упругого щарнира, выполненного в виде двух плоских, расположенных под углом 90°, пружин, причем гибкие плечи двух рычагов расположены под углом 90°, ось третьего гибкого плеча рычага перпендикулярна к прямой, проходящей через точку пересечения угла между ними, и являющейся его биссектрисой 1.
Недостатком известного манипулятора является возможность точной юстировки объекта только в одной плоскости, совпадающей с плоскостью предметного столика, что не позволяет осуществить точную юстировку объекта в двух взаимно перпендикулярных плоскостях.
Цель изобретения - осуществление юстировки объекта в двух взаимно перпендикулярных плоскостях.
Указанная цель достигается тем, что микроманипулятор снабжен плитой, ножевой опорой, закрепленной на основании
,Q микрометрическим винтом и двуплечным рычагом, установленном на плите посредством стойки с упругим щарниром и контактирующим коротким плечом с ножевой опорой, а длинным - с микрометрическим винтом, при этом основание связано с плитой посредством кронштейна с упругим щарниром, а геометрические оси указанных щарнйров параллельны основанию.
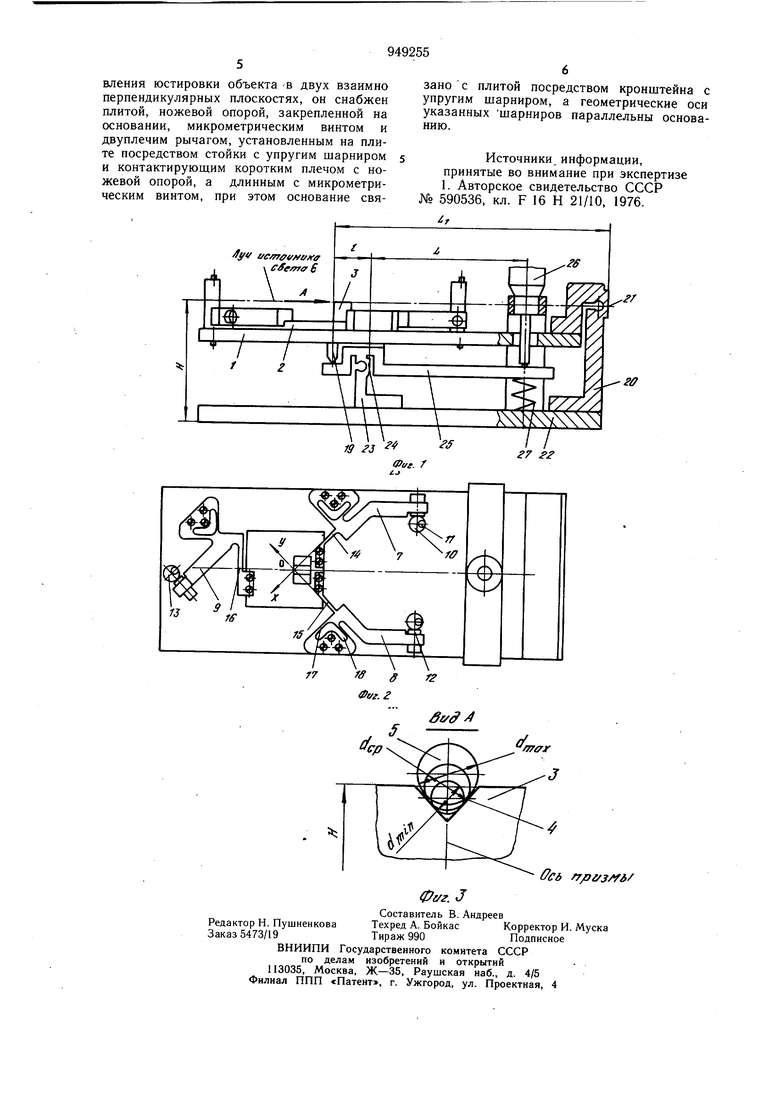
На фиг. 1 схематически изображен микроманипулятор, вид сбоку; на фиг. 2 -
20 то же, вид сверху; на фиг. 3 - вид А на фиг. 1.
Микроманипулятор содержит,- основание 1, предметный столик 2, с закрепленной на нем прямоугольной призмой 3 с V-образной направляющей 4, световодом 5 ось которого центрируют относительно луча источника 6 света. Столик 2 связан с основанием 1 при помощи трех упругих элементов. Упругие элементы имеют жесткие плечи 7-9, контактирующие посредством винтов предварительного натяга 10 с соответствующими кулачковыми приводами 11 -13 и гибкие плечи 14-16 соответственно. Каждый упругий элемент средней частью жестко соединен с основанием 1 посредством упругого щарнира, выполненного в виде двух плоских расположенных под углом 90° друг к другу пружин 17 и 18, жестко связанных с гибким и жесткими плечами. Все гибкие и жесткие плечи упругих элементов лежат в плоскости предметного столика 2 и образуют двуплечи-й рычаг. Геометрические оси гибких плеч 14 и 15 двух рычагов расположены под углом 90°, ось третьего гибкого плеча 16 перпендикулярна к прямой, проходящей через точку пересечения упомянутых плеч и являющейся биссектрисой угла между ними. Основание 1, имеющее ножевую опору 19, закреплено, на кронщтейне 20 с упругим шарниром 21, установленным на плите 22, на которой через стойку 23 с упругим щарниром 24 закреплен двуплечий рычаг 25, контактирующий коротким плечом с ножевой опорой, а длинным - с микрометрическим винтом 26, причем отношение длин плеч и L равно 1:10. При этом оси качания упругих щарниров 21 и 24 параллельны основанию 1 и соответственно перпендикулярны осям упругих элементов предметного столика 2. Для ликвидации люфтов по месту контактов ножевой опоры и микрометрического винта с двуплечим рычагом 25 служит пружина 27. Микроманипулятор конструктивно выполнен таким образом, что в исходном положении линия контакта ножевой опоры 19, ось 24 качания, ось среднего диаметра контактируемого световода 5 и ось 21 качания лежат во взаимнопараллельных плоскостях, а точка О, образованная пересечением торца и оси призмы 3, совпадает с осью пересечения гибких плеч 14 и 15, которая и является осью поворота предметного столика 2. Все это обеспечивает минимальную погрешность по перпендикулярности торца световода по отношению к лучу источника света в процессе юстировки. Микроманипулятор работает следующим образом. Луч источника 6 света предварительно выставляют вдоль оси призмы 3 в вертикальной плоскости и на высоту Н от плиты 22 в горизонтальной плоскости, после чего его фиксируют в точку. В V-образную направляющую 4 укладывают световод 5, совмещают его торец с торцом призмы 3 и включают источник удержания световода, например вакуум. Сначала производят окончательную юстировку световода в горизонтальной плоскости. Работая кулачковыми приводами 11 и 12, дают сканирующее перемещение по координатам X и Y через 1 мкм предметному столику 2 вместе с призмой 3 и световодом 5, добиваясь совмещения его оси по торцу призмы, - точки О с центром фокуса луча 6, что определяется максимальной величиной параметра на выходе световода, который непрерывно измеряется в процессе юстировки. Далее производят юстировку оси световода относительно оси луча источника света, обеспечивая их соосность путем разворота торца световода вокруг точки О, воздействием кулачкового привода 13 на предметный столик по максимальной величине параметра, измеряемого на выходе световода, после чего считают юстировку световода в горизонтальной плоскости законченной и приступают к операции юстировки световода в вертикальной плоскости. Давая дозированные перемещения через 0,01 мм микрометрическим винтом 26 длинному плечу двуплечего рычага 25, перемещают его коротким плечом основание 2 и все, что на нем находится, в том числе и световод через 1 мкм, относительно точки фокуса луча, добиваясь максимальной величины измеряемого параметра, что определяет его окончательное положение в двух взаимно перпендикулярных плоскостях. Имея в виду, что световод диаметром 50 мкм имеет сердцевину диаметром 30 мкм, что соответствует диаметру пятна сфокусированного луча источника света, юстировка с точностью 1 мкм обеспечивает полный ввод излучения в световод. Микроманипулятор разработан для юстировки световодов диаметром от 50 мкм до 300 мкм включительно, при этом торец призмы и светодиода отнесен на такое расстояние от оси качания 21, при котором максимальные углы наклона V-образной направляющей находятся в пределах 3 , что соответствует уходу торца световода от фокуса луча источника света ± 2 мкм. Таким образом, наличие точных подвижок в двух взаимно перпендикулярных плоскостях с разрешением 1 мкм и более, которое дает данный микроманипулятор, позволяет использовать его в оптических устройствах для контроля оптических характеристик световодов и при юстировке его входного торца исследовать влияние условий ввода излучения на характеристики передачи волокна, а при юстировке выходного торца исследовать структуру поля оптического излучения, выходящего из световода в ближней зоне,и что важно для измерения его пространственно-временных характеристик. Формула изобретения Микроманипулятор по авт. св. № 590536, отличающийся тем, что, с целью осущест
