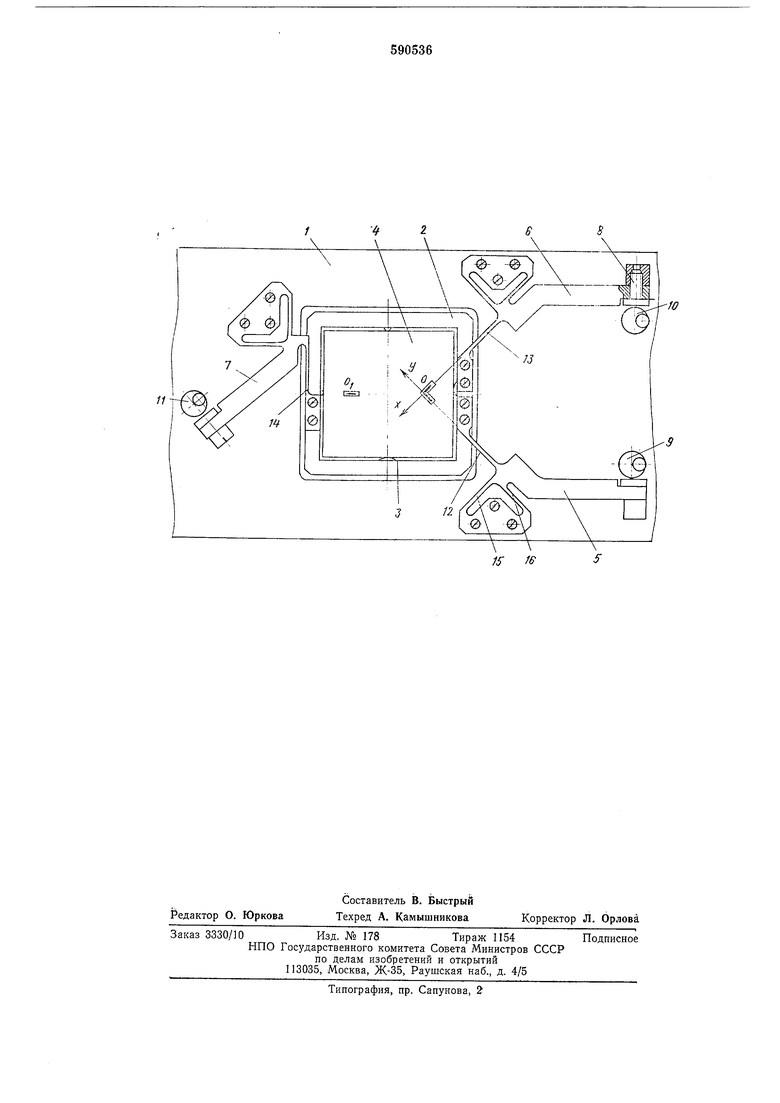
На чертеже схематически изображен предлагаемый микроманипулятор, план.
Микроманипулятор содержит основание 1, предметный столик 2 с закрепленными на нем пружинами 3 объектом 4 и со знаками О и Oi совмещения. Столик 2 связан с основанием 1 при помощи трех упругих элементов. Упругие элементы имеют жесткие плечи 5, 6 и 7, соответственно контактирующие посредством винтов иредварительного натяга 8 с соответствующимн кулачковыми приводами 9, 10 и 11, и гибкие плечи 12, 13 и 14 соответственно. Каждый упругий элемент средней частью жестко соединен с основанием 1 посредством упругого щарнира, выполненного в виде двух плоских расположенных под углом 90° друг к другу пружин 15 и 16, жестко связанных с гибким и жестким плечами. Все гибкие и жесткие плечи упругих элементов лежат в плоскости предметного столика 2 и образуют двуплечий рычаг. Геометрические оси гибких плеч 12 и 13 двух рычагов расположены под углом 90°, ось третьего гибкого плеча 14 перпендикуляриа к прямой, проходящей через точку пересечения упомянутых плеч и являющейся биссектрисой угла между ними.
Манипулятор работает следующим образом.
Ориентация объекта 4 производится по двум знакам О и Оь Сначала ориентируется знак О перемещением его параллельно координатам X и У, затем знак Оь путем поворота его вокруг точки, лежащей в центре знака О. Для перемещения знака О параллельно координате У включается привод кулачка 9, который в плоскости столика 2 поворачивает плечо 5, которое через гибкое плечо 12 перемещает предметный столик 12, являющийся шатуном четырехзвенника, образованного самим столиком 2, гибкими плечами 13 и 14 и основанием 1, играющим роль стойки четырехзвенника. При этом зона объекта, в которой расноложен знак О, движется по траектории, близкой к прямой, параллельной координате У. Для перемещения знака О по координате X включается кулачковый нривод, который через плечи 6 и 13 перемещает зону знака О параллельно координате X. В этом случае в качестве направляющих используется четырехзвенник. Для ориентации знака Oi служат плечи 7 и 14, поворачивающие предметный столик 2 вокруг оси, лежащей в зоне знака О. Ось образуется двумя гибкими плечами 12 и 13, которые теперь используются в качестве несимметричного упругого шарнира.
Основным преимуществом изобретения является повышенная точность хода, соответствующая ±0,05 мкм в диапазоне 300 мкм при длинах гибких плеч 30 мм.
Использование микроманипуляторов на операциях совмещения в проекционных установках методом сканирующего переноса изображения позволяет увеличить производительность этих установок, надежность и процент выхода годных изделий.
Формула изобретения
Микроманипулятор, содержащий основание, связанный с ним посредством упругих элементов предметный столик и кулачковые приводы, воздействующие на упругие элементы, отличающийся тем, что, с целью упрощения конструкции и иовыщения точности, каждый упругий элемент выполнен в виде имеющего жесткое и гибкое плечи лежащего в плоскости цредметиого столика двуплечего рычага, контактирующего жестким плечом с соответствующим кулачковым приводом, а гибкое плечо жестко соединено с предметным столиком, геометрические оси гибких плеч двух рычагов расположены под углом 90°, ось третьего гибкого плеча перпендикулярна к прямой, проходящей через точку пересечения Зпомянутых плеч и являющейся биссектрисой угла между ними, а каждый из рычагов средней частью соединен с основанием jmpyrHM шарниром, выполненным в виде двух плоски расположенных под углом 90° пружин, жест ко связанных с рычагом.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 1261120, кл. 12g 17/34 1965.
2.Патент США № 3870416, кл. 356-138 1975.
s
Г fe
т
If
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1981 |
|
SU949255A2 |
| Манипулятор | 1976 |
|
SU744788A1 |
| Устройство для микросварки ленточных перемычек | 1982 |
|
SU1017452A1 |
| Пространственный механизм | 1990 |
|
SU1726232A1 |
| Установка для присоединения проволочных выводов методом термокомпрессии | 1976 |
|
SU604056A1 |
| Устройство проекционного экспонирования промежуточных фотооригиналов | 1984 |
|
SU1267343A1 |
| Устройство для присоединения кристаллов | 1979 |
|
SU790037A1 |
| Установка для микросварки проволочных проводников | 2021 |
|
RU2759103C1 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| ТРЕХКООРДИНАТНЫЙ ПРЕЦИЗИОННЫЙ СТОЛИК (ВАРИАНТЫ) | 2007 |
|
RU2368021C2 |