1
Изобретение относится к об-П ласти оптической вычислительной техники.
Известны микроманипуляторы, устройства для совмещения растровых модулей с информационной кассетой, устройства для совмещения рисунка подложки с фотошаблонагли, механизмы перемещенжя предаетного столика микроскопа, содержащие основание, корпус, разглещенный в нем двухкоординатный поворотный стол с микрометрическими винтами для совмещения и поворота, механизмы крепления подложки , механизмы подачи фотошаблонов, оптическое устройство.
Цель изобретения - повышение точности ориентации линзорастровых модулей относительно вспомогательных баз,обеспечение переноса модуля на прозрачную подложку растровой информационной кассеты (РИК) без нарушения полученной ориентации, а также увеличение кинематической чувствительности органов управления микроперемещений линзорастрового модуля и поворота микроманипулятора.
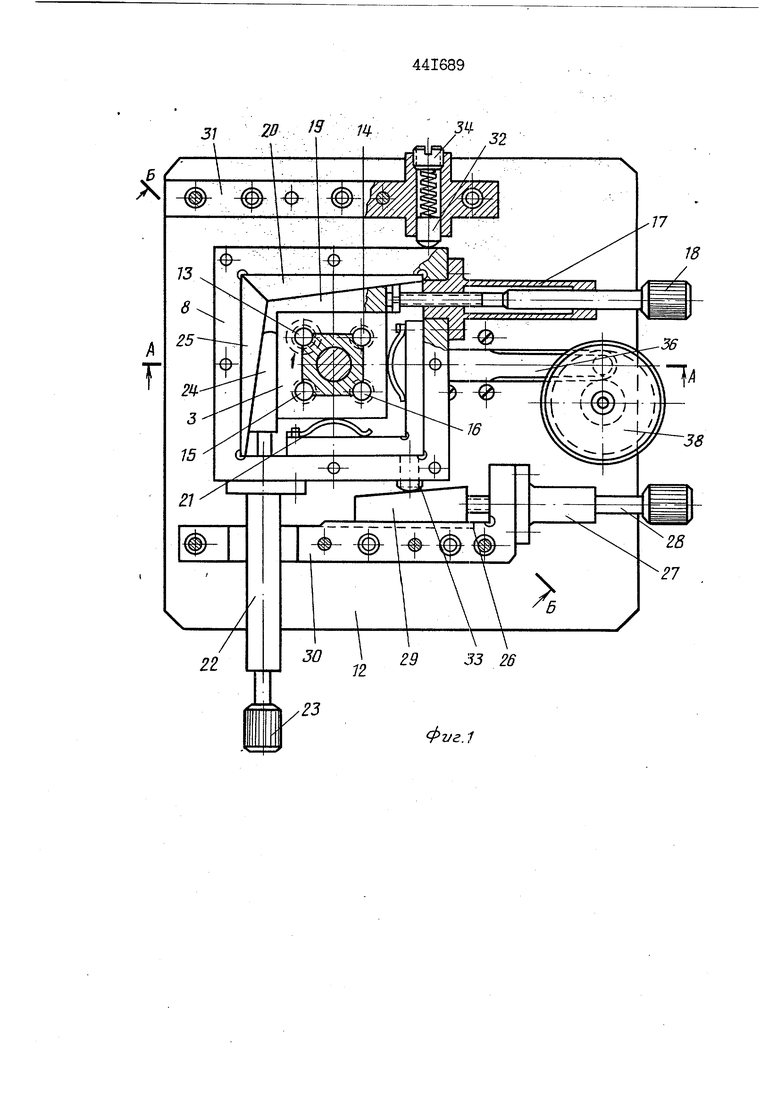
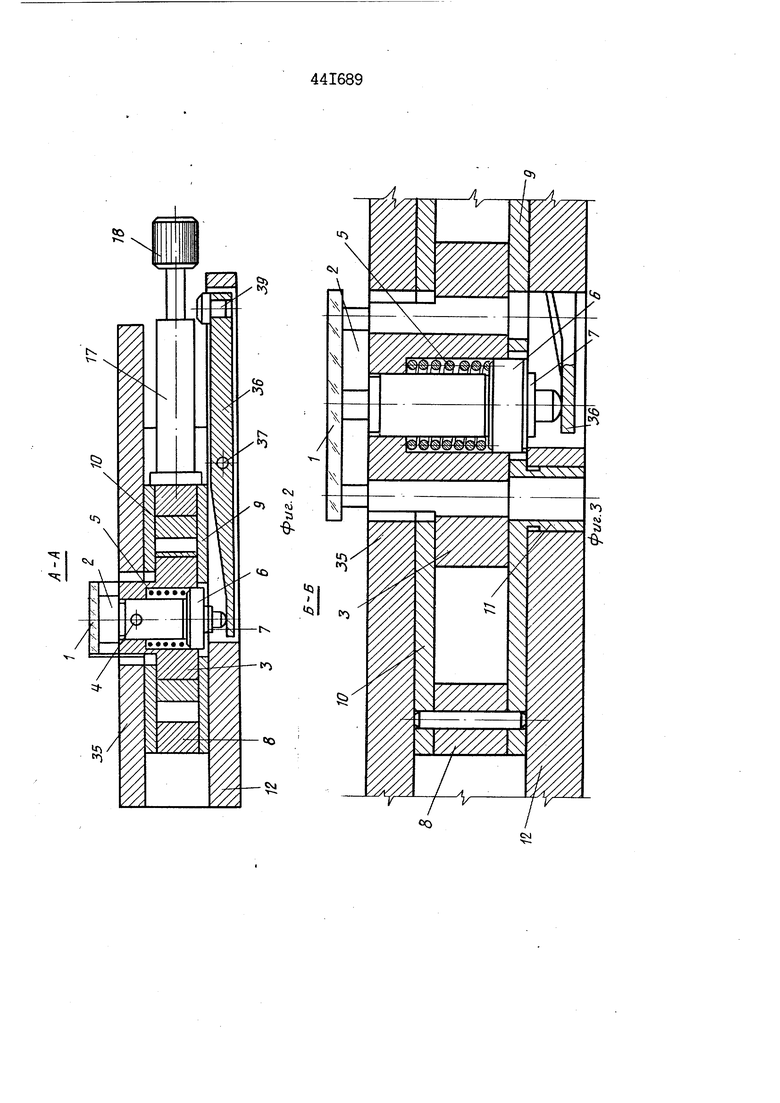
Это достигается тем, что линзорастровый модуль закреплен на торцовой поверхности арретира механизма переноса модуля, двухкоординатный столик представляет собой плаващий вкладыш, расположенный внутри корпуса микроманжпулятора, в котором подвижно установлен арретир механизма переноса модуля, вал поворота микроманипулятора выполнен пустотелым и размещен в основании механизма переноса растрового модуля. Кроме того, для возможности визуального просмотра в проходящем свете базовых линз модуля расточены по четыре соосно расположенных смотровых отверстия в арретире, плавающем вкладыше, нижней крышке микроманипулятора и в основании механизма переноса модуля. На фиг. I покашя предлагавши микрощнипулятор, вид в плане с частйчяыш разрезами (без верхней плиты); на фиг. 2-то ке, поперечный разрез по А-А на фиг. Г по оси поворота микроманипулятора: на фиг. 3 - pa3pe3j io Б-Б на фиг,1 Линзорастровый модуль I установлен и закреплен на торцовой поверхности арретира 2 маханизма переноса модуля. Арретир по скользящей посадке вставлен в плавамцегй вкладыш 3. Палац 4, запрессованный в арретир, препятствует повороту последнего относительно плаващего вкладыша; Арретир прижат к торцовои поБзрхности плавающего вкладыша силой сжатия пружины 5. Кольцо 6, застопоренное на нижнем конце арретира стопорной шайбой 7, является поддерживающей опорой арретира. Плавающий вкладыш расположен внутри корпуса 8 микроманипулятора между опорной (нижней) плитой 9 микроманипулятора и его крышкой 10 Опорная плита и крышка прикреплены к корпусу микроманипулятора винтами и штлфтавли так, что плава.щий вкладыш может перемещаться внутри корпуса микроманипулятора. Вокруг полой оси II опорной плиты, установленной по скользящей посадке в основание 12 адбхамизма переноса мо.цуля, шкроманипулятор имеет воз можность поворачиваться. Полая ось II выполнена за одно целое с опорной плитой Э. В арретире, в плавающем вкладыше, опорной плите и основании 12 соосно расточены по четыре смотровых отверстия 13-16. Механизм микроперемещения линзорастрового модуля по оси У-У выполнен клино-микровинтовым. Гайка 17 механизма микроперемещений выполнена путем заливки стирокрила в обойму вместе с микрометрическим винтом 18. Гайка 17 центрирующим пояском вставлена в отверстие корпуса 8 микроманипулятора и закреплена винтамж. Клин 19 механизма имеет Т-образный паз в который вставлен Т-образный конец микровинта 18. Внутри корпуса микроманипулятом установлен неподвижный клин 20, служащий опорой подвигкного клина 19. Плаваю(ци2 вкладыш прижат к клину 19 силой сжатия плоской пружины 21. Механизм микроперемещения линзорастрового модуля по оси изготовлен аналогично. Механизм включает аналогичные детали: гайку 22, микрометрический винт 23, подвижный клин 24, неподвижный клин 25 и плоскую пружину 26, Механизм микроповорота микрошнипулятора вокруг полой оси II выполнен также клино-микровинтовым. Гайка 27, микромет|шчеокий винт 28 и соединение микровинта 28 с подвижным клином 29 аналогичны соответствующим элементам механизма микроперемещений. Гайка 27 центрирующим пояском вставлена в отверстие бруска 30 и закреплена винтами. Подвижный клин 29 имеет возможность перемещения вдоль продольного паза, сделанного в бруске 30. В бруске 31 вмонтирован буфер ный узел. Корпус в микроманипулятора поджат толкателем 32 к подвижному клину 29 пятой 33 под действи ем силы сжатш пружины, отрегулированной винтом 34. Бруски 30 и 31 установлены между основанием 12 и верхней плитой 35 так, что микроманипулятор имеет возможность поворота вокруг ПОЛОЙ оси II. Рычаг 38 механизма переноса линзораотрового мо.дуля на прозрачную подложку РИК установлен на оси 37. МахоВИчок 38, выпо.лНенный в виде тошового кулачка, расположен на оси. Торцовая поверхность кулачка опирается на пяту 39, запрессованную в- выходн-ой конец рлчага 36. Микрог/анипулятор |йб0тает следующим образом.. Линзорастровый модуль I устанавливают и закрепляют на торцовой поверхности арретира 2. Оптическую ось одной из базовых линз растрового модуля совмещают с осью поворота микрогланипулятора с полой осью II под микроскопом при помощи микроманипулятора. При вращении шшрометрического винта 18 механизм микроперемещения линзорастрового модуля по оси У-У клин 19 перемещается посту пательно. Перемещение подв шного клина 19 вызывает перемещение плавающего вкладыша 3 под действием (или против действия) силы сжатия плоской дружины 21. При этом плаващий вкладыш силой сжатия плоской пружины 26 все время прижимает ся к подвижному клину 24. Таким образом обеспечивается постоянное направление перемещения плавающего вкладыша , перпендикулярно к оси X-X, Аналогично при вращении микрометрического винта 23 механизма микропаремещения линзорастрового модуля по оси Х-Х плавающй вкладыш перемещается перпендикулярно к оси У-У. Вместе с плаваюошм вкладышем в направлении осей Х-Х и У-У перемещается смонтированный в нам меха низм переноса линзорастрового моду ля. На торцовой поверхности арретира 2 механизма переноса установлзн линзорастровый модуль. Таким образом, происходит совмещение оптической оси базовой линзы растрового модуля с осью поворота микроманипулятора. Ориентацию оптических осей остальных базовых линз растрового модуля осуществляют поворотом лшкроманипулятора вокруг полой оси II до полной ориентации относительно вспомогательных технологических баз. При вращании микрометрического винта 28 механизма микроповорота лшкроманипулятора перемещается поступательно клин 29, что вызывает поворот микроманипулятора под действием (или против действия) сил сжатия цилиндрической пружины буферного устройства вокруг полой оси И. При повороте маховичка 38 на четверть окружности рычаг 36 поворачивается вокруг оси 37, поднимает арретир с линзорастровым модулем и переносит последний на прозрачную подложку РЖ без нарушения достигнутой ориентации, так как палец 4, запрессованный в арретире, перемещаясь в пазу плаващего вкладыша, предохраняет арретир от поворота во время подъема. При возвращении маховичка в первоначальное положение арретир устанавливается в исходное положение под действием силы сжатия пружины 5. ПРЕдаЕТ ЙЗОБРЕТЕНШ Микроманипулятор, содержащий механизм переноса модуля с арретиром и основанием, на котором расположена опорная плита с валом поворота и корпусом, внутри которого размещены механизмы перемещении модуля в двух взаимно перпендикулярных направлениях, отличаю, щ и и с я там, что, с целью увеличения точности установки модуля и повышения кинематической чувстви твльности, арретир установлен подвижно в плаващем вкладаше в корпусе, вал поворота выполнен пустотзлым и установлен в основании механизма переноса модуля, в арретире, плавающем вкладыше, корпусе и основании выполнены по четыре соосно расположенных смотровых отверстия. 20 3 74 Фуг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки растровой информационной кассеты | 1972 |
|
SU455310A1 |
| Устройство для совмещения деталей | 1979 |
|
SU845305A1 |
| Установка для нанесения растрового рельефа на матрицу | 1972 |
|
SU568929A1 |
| Микроманипулятор | 1981 |
|
SU949255A2 |
| РПРОФЮЗНАЯ 1пдиптяо.ган:^...-^^,^g''-•at.ij.y'lif— , ..» | 1972 |
|
SU326668A1 |
| Устройство для горизонтирования приборов | 1985 |
|
SU1348647A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ЖИДКИХ ИЛИ ПАСТООБРАЗНЫХ ВЕЩЕСТВ НА ТВЕРДЫЕ ПОДЛОЖКИ И ЕГО МЕХАНИЗМ КАЛИБРОВКИ ЗАЗОРА РАКЕЛЬНОГО БЛОКА | 2003 |
|
RU2238153C1 |
| СТРОГАЛЬНО-ПИЛЬНЫЙ СТАНОК | 1992 |
|
RU2050263C1 |
| Микроманипулятор | 1980 |
|
SU901974A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |