(54-) УСТРОЙСТВО ФИКСАЦИИ ЗАПОРНОГО ОРГАНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный аварийный клапан | 1980 |
|
SU870834A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 1972 |
|
SU434214A1 |
| Вакуумный клапан | 1980 |
|
SU932069A1 |
| Топливный насос для системы питания двигателя транспортного средства | 1985 |
|
SU1318716A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 1992 |
|
RU2068145C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 1990 |
|
RU2016335C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 1988 |
|
RU2016327C1 |
| Электромагнитный клапан | 1974 |
|
SU607087A1 |
| БЫСТРОЗАПОРНЫЙ КЛАПАН ДЛЯ МАГИСТРАЛЕЙ БОЛЬШОГО ДИАМЕТРА | 1994 |
|
RU2067714C1 |
| Устройство для разрезания и съема картона с форматного вала картоноделательной машины | 1981 |
|
SU971973A1 |
1
Изобретение относится к вакуумной технике и может найти применение в системах перекрытия вакуумных магистралей.
Известно устройство, якорь электромагнита которого соединен при помощи Ьистемы рычагов с фиксатором штока запорного органа, причем шток снабжен приводом 1.
Недостатком данного устройства является невысокая надежность вследствие сложной системы рычагов, вызываюших значительные инерционные нагрузки на шток за- ю порного органа.
Известно также устройство, содержаш.ее захват, управляемый с помощью электромагнита, и взаимодействующий со щтоком фиксатор открытого положения 2.
Недостатком известного устройства является невысокое быстродействие вследствие сложной кинематики передачи управляющего усилия.
Целью изобретения является повышение быстродействия устройства.20
Поставленная цель достигается тем, что в захвате выполнено отверстие, через которое пропущен щток с пазами, а фиксатор выполнен в виде подпружиненного в сторону
штока упора и установлен между захватом и запорным органом с возможностью взаимодействия с одним из пазов при открытом положении запорного органа, причем второй паз штока расположен в рабочей зоне захвата.
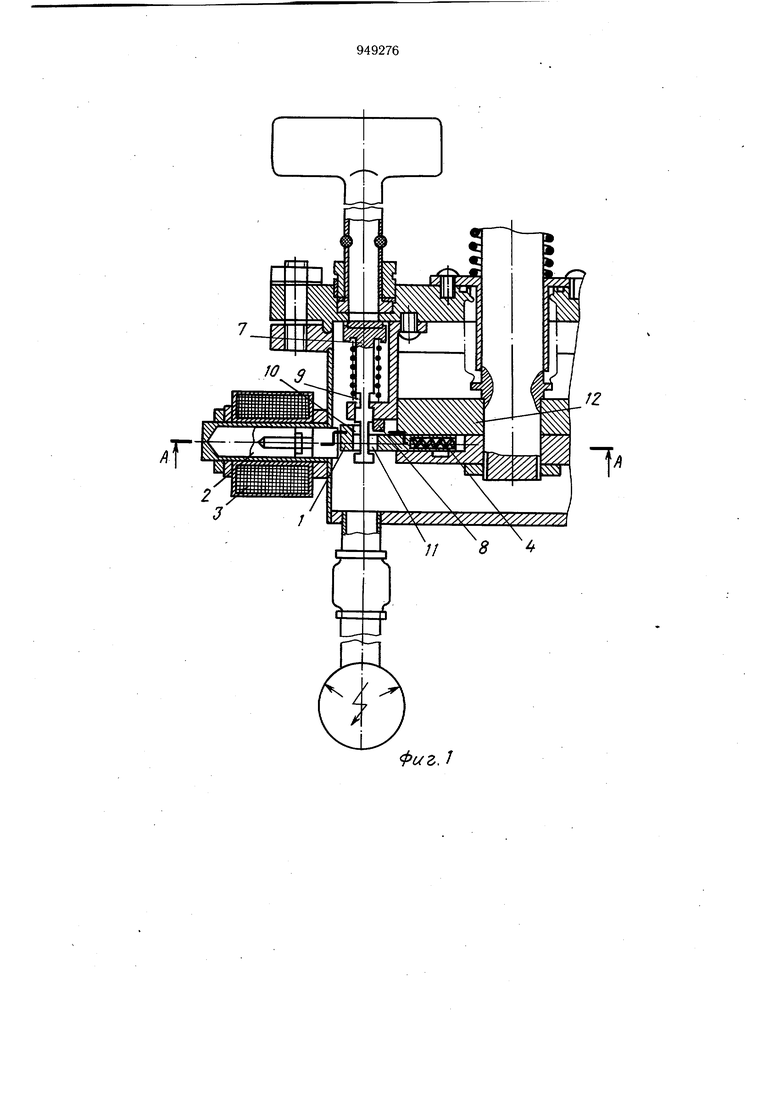
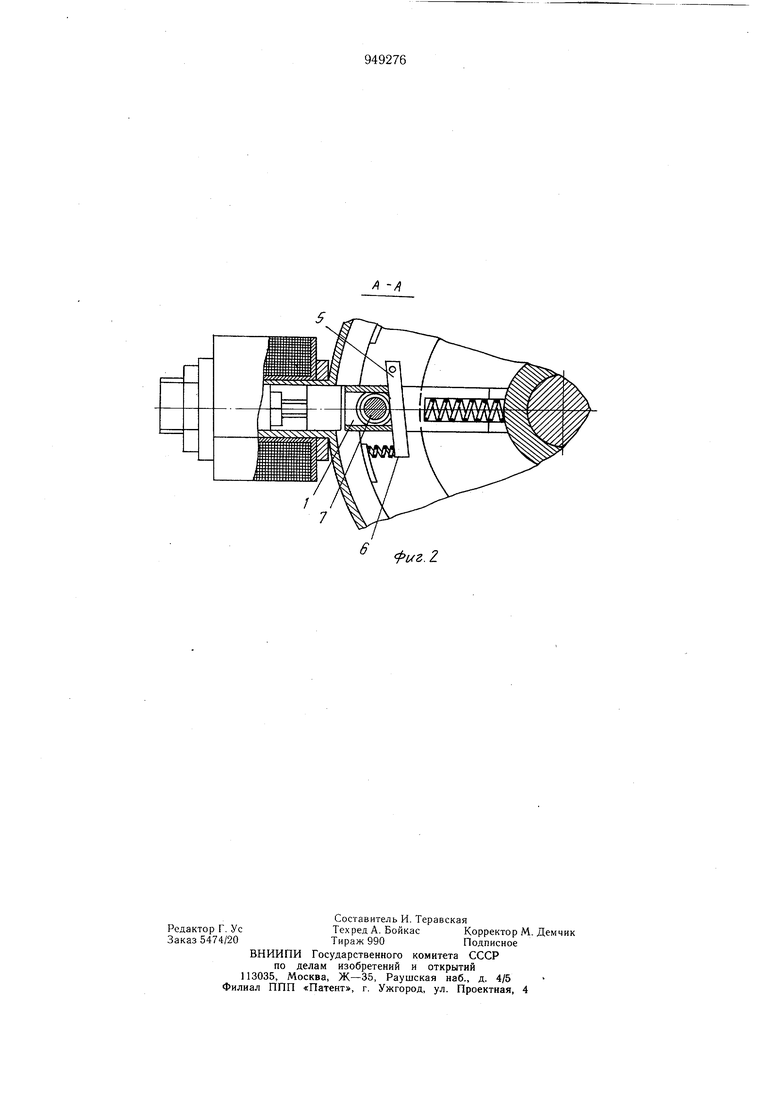
На фиг. 1 изображено устройство фиксации запорного органа, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Устройство фиксации запорного органа состоит из захвата 1, управляемого при помощи якоря 2 электромагнита 3 и подпружиненного пружиной 4, фиксатора 5, подпружиненного в сторону захвата 1 пружиной 6, щтока 7, жестко соединенного с запорным органом 8. На штоке 7 выполнены последовательно два паза 9 и 10, а в захвате 1 - сквозное отверстие 11, через которое пропущена часть штока с нижним пазом 10. Фиксатор 5 размещен выще захвата 1 и в открытом положении входит в верхний паз 9. Шток 7 в нижней части кинематически связан через захват 1 с приводом 12.
Устройство работает следующим образом.
При подаче на обмотки электромагнита 3 напряжения, якорь 2, перемещаясь, воздействует на захват 1, который, перемещаясь, входит в нижний паз 10, образуя кинематическую связь с приводом 12, в результате чего шток 7 вместе с запорным органом 8 перемещается вниз, сообщая вакуумную полость с выходным каналом. В момент достижения конечного положения щтока 7, фиксатор 5 входит в паз 9 под действием пружины 6, электромагнит 3 в этот момент обесточивается и захват 1 под действием пружины 4 выходит из паза 10, разъединяя шток 7 от .кинематической связи с приводом 12, который, в свою очередь, возвращается в исходное положение.
Для закрытия устройства включается электромагнит 3, якорь 2 которого, воздействуя через захват 1 на фиксатор 5, выводит его из паза 9 и щток 7 под действием пружины возвращается в исходное положение, при этом запорный орган 8 садится на свое седло (фиг. 1 и 2).
Таким образом, выполнение на щтоке последовательно двух пазов, а в захвате - сквозного отверстия, через которое пропущена часть щтока запорного органа с нижним пазом и размещение фиксатора выще захвата на расстоянии, равном ходу щтока и в открытом положении входящего в верхний паз последнего, позволяет повысить быстродействие предложенного устройства в 4-5 раз за счет исключения жесткой кине
матическои связи между щтоком запорного органа и приводом.
Повышение быстродействия исключает повреждение элементов вакуумных систем.
Формула изобретения
Устройство фиксации запорного органа, содержащее захват, управляемый с помощью электромагнитного привода, и взаимодействующий со щтоком запорного органа фиксатор открытого положения, отличающе.еся тем, что, с целью повышения быстродействия,в захвате выполнено отверстие, через которое пропущен шток с пазами, а фиксатор выполнен в виде подпружиненного в сторону щтока упора и установлен между захватом и запорным органом с возможностью взаимодействия с одним из пазов при открытом положении запорного органа, причем второй паз штока расположен в рабочей зоне захвата.
Источники информации,
принятые во внимание при экспертизе
