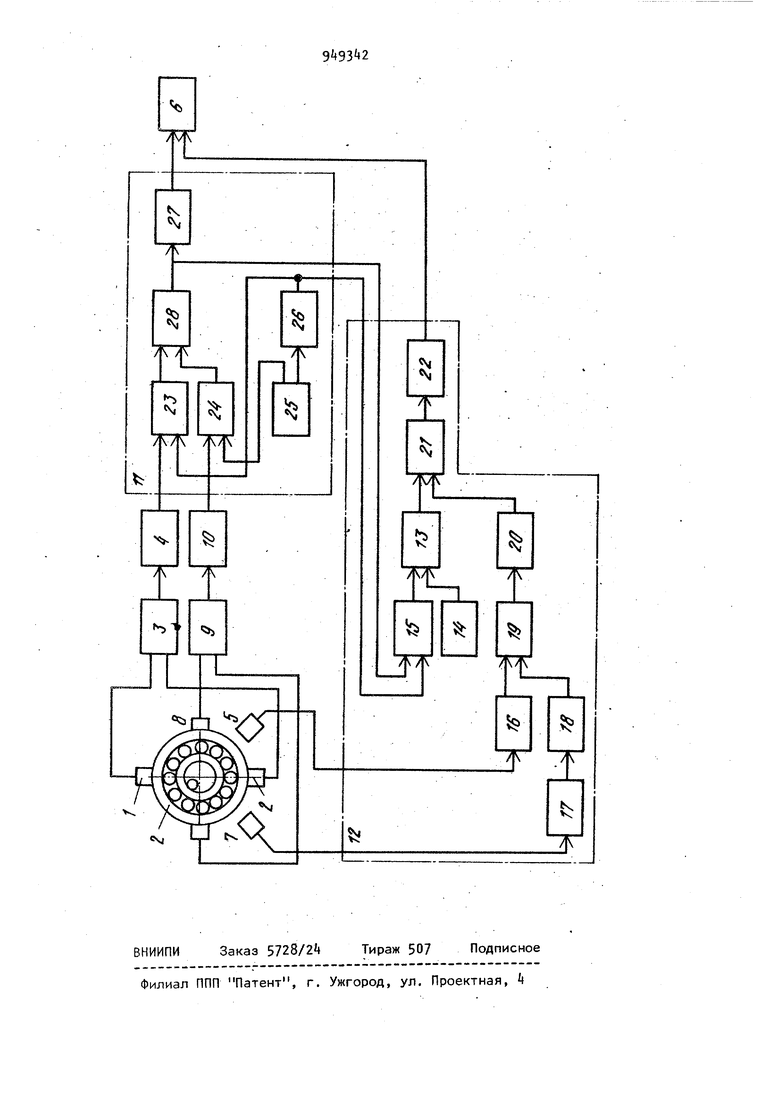
(5+) СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ У ОБЪЕКТОВ . ЦИКЛИЧЕСКОГО ДЕЙСТВИЯ И УСТРОЙСТВО . ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Изобретение относится к контролю .И диагностике объектов циклического действия посредством анализа виброакустических колебаний и может быть использовано для контроля и диа1- ностики подшипников качения, зубчат фрикционных передач и двигателей внутреннего сгорания. Известен метод определения дефектов у объектов циклического действия, заключающийся в том, что преобразовывают информацию о положе НИИ дефектов деталей в электрический сигнал, осуществляют усиление, фильтрацию и накопление сигнала, по которому оценивают характер шумов для определения повреждений отдельных зубьев 1. Недостатком данного метода является то, что он не позволяет контроливать распределенные дефекты. Кроме того, его можно использовать только для контроля зубчатых шестерен,но он не применим для определения дефектов у объектов циклического действия, например подшипников качения. Наиболее близким к изобретению по технической сущности является способ определения дефектов у объек-тов циклического действия, заключающийся в том, что преобразовывают сигнал вибрации в электрический сигнал, осуществляют усиление, фильтрацию и накопление сигнала в суммирующем анализаторе и преобразуют угловое положение деталей в электрический сигнал 23. Способ осуществляют устройством, содержащим измерительный канал, включающий последовательно соединенные преобразователь вибраций, усилитель и полосовой фильтр, датчик углового положения деталей объекта и суммирующий анализатор. Кроме того, оно содержит канал синхронизации, включающий последовательно соединенные тахометрический датчик, преобра зователь частоты, выход которого сое динен со вторым входом суммирующего анализатора. Недостатком способа является низ кая достоверность определения местонахождения дефектов, так как пре образователь вибрации имеет пространственную ориентацию чувствительйости, поэтому, если колебания распространяются в направлении, не сов падающем с направлением оси чувствительности преобразователя вибрации, то сигнал на его выходе уменьш и соответственно снижен уровень пиков в сигнале, накопленном суммирующим анализатором, характеризующи дефекты. Синхронизация суммирующего анализатора по, угловому положению ведущего вала или по угловому положению контролируемой детали приводит в общем случае к разнице между числом дефектов и числом пиков в си нале, накопленном суммирующим анали затором, что затрудняет определение местонахождения дефектов. Целью изобретения является повышение достоверности определения мес тонахождения дефектов. Указанная цель достигается тем, что определяют значения модуля пространственного вектора вибрации и значения его положений в системах координат подвижных и неподвижных деталей, и накапливают значения модуля пространственного вектора вибрации по значениям его положений в каждой из систем координат контроли руемых деталей в течение нескольких циклов действий объекта, и по величине максимумов накопленных значений модуля вектора и по соответствующим этим максимумам значений его положений в выбранной системе координат определяют местонахождение де фектов. Устройство, позволяющее осуществить способ, снабжено по меньшей ме ре одним дополнительным датчиком уг лового положения деталей объекта и одним дополнительным измерительным каналом, блоком вычисления модуля ве тора вибраций, блоком вычисления положения вектора вибраций, включающим ключ, генератор и преобразователь сдвига фаз, которые подключены к управляющим входам ключа, счетчик углового положения детали, последовательно соединенные с дополнительным датчиком углового положения деталей, блок преобразования частоты, дополнительный счетчик углового положения деталей, переключатель, дополнительный вход которого соединен через счетчик углового положения деталей с датчиком углового положения деталей, преобразователь кода, счетчик импульсов, вход которого соединен с выходом ключа, и дешифратор, выход которого соединен со входом суммирующего анализатора при этом блок вычисления модуля вектора вибраций включает основной и дополнительные модуляторы, ко входам которых подключены полосовые, фильтры, дополнительный генератор, фазосдвигающий каскад, вход которого хоединен с выходом дополнительного генератора, другой выход которого соединен со входом дополнительного балансного модулятора, а выход фазосдвигающего каскада - со входами преобразователя сдвига фаз и основного балансного модулятора, выпрямитель, выход которого соединен с дополнительным входом суммирующего анализатора, сумматор, вход которого соединен с выходом балансных модуляторов, а выход - с выпрямителем и другим входом преобразователя сдвига фаз. На чертеже изображена блок-схема устройства для осуществления способа определения дефектов у объектов циклического действия. Устройство содержит измерительный канал, включающий последовательно соединенные преобразователь 1 вибраций, обе части которого закреплены на наружном кольце контролируемого объекта, например подшипника 2, усилитель 3 и псрлосовсй фильтр , датчик 5 углового положения деталей объекта и суммирующий анализатор 6, выполненный на коммутируемых емкостях. Устройство снабжено по меньшей мере одним дополнительным датчиком 7 углового положения деталей;объекта, например тел качения подшипника и одним дополнительным измерительным каналом, включающим также последовательно соединенные дополнительные преобразователь 8 вибраций, обе части которого установлены диаметрально противоположно, усилитель 9 и полосовой фильтр 10, блоком 11 вычисления мо5дуля вектора вибраций, блоком 12 вы числения положения вектора вибраций включающим ключ 13 генератор и преобразователь 15 сдвига фаз синусоидальных несущих во временной интерзал, которые подключены к управл ющим входам ключа, счетчик 16 углового положения детали ( кольца ), последовательно соединенные с дополни тельным, датчиком 7 углового положения деталей блок 17 преобразования частот.ы, дополнительный счетчик 18 углового положения деталей ( сепаратора подшипника), переключатель 19, дополнительный вход которого соединей через счетчик 16 углового положения деталей с датчиком 5 углового положения деталей, преобразователь 20 кода счетчик 21 импульсов, вход которого соединен с выходом ключа 1 и дешифратор 22, выход которого сое динен со входом суммирующего анализатора 6, Блок 11 вычисления модуля вектора вибраций включает основной и дополнительные модуляторы 23 и 24 к входам которых подключены указанные полосовые фильтры и 10, дополнительный генератор 25, фазосдвигающий на 90 каскад 26, вход которого соединен с выходом дополни тельного генератора 25, другой выхо которого соединен со входом дополнительного балансного модулятора 2 а выход фазосдвигающего каскада 26 со входами преобразователя 15 сдвиг фаз и основного балансного модулятора 23, выпрямитель 27 выход которого соединен с дополнительным входом суммирующего анализатора 6, сумматор 28, вход которого соединен с выходом балансных модуляторов 23 и 24, а выход - с выпрямителем 27 и другим входом преобразователя 15 сдвига фаз. Выход суммирующего анализатора 6 подключен к устройству индикации или регистрации (на чертеже не показано, а преобразовател вибраций размещены через 90, Определяют дефекты у о бъектов ци лического действия следующим образо При вращении внутреннего кольца подшипника 2 в неподвижном наружном кольце возбуждаются колебания, которые характеризуются пространствен ным вектором, величина которого и направление в пространстве взаимо-связаны с наличием, местонахож.дением и величиной дефектов в под шипнике. Измеряя значения модуля вектора и его угловые положения в системах координат неподвижного наружного кольца, подвижного внутреннего кольца и сепаратора, определяют при каких угловых положениях, в каждой из этих систем координат вектор принимает пиковые значения и какие угловые положения он занимает чаще всего, тем самым определяют местонахождение дефектов. Сигналы с обеих частей преобразователя 1 вибраций, воспринимающих составляющую вибрации по оси ординат, поступают на вход усилителя 3. Сигналы с двух частей дополнительного преобразователя 8 вибраций, воспринимающих составляющую вибрации по оси абсцисс, поступают на вход дополнительного усилителя 9. С выходов усилителей 3 и 9 усиленные сигналы поступают на входы полосовых фильтров 4 и 10 соответственно. Сигналы с выходов фильтров поступают на первые управляющие входы балансных модуляторов 23 и 24, на вторе входы которых подается опорное синусоидальное напряжение от генератора 25, причем на дополнительный балансный модулятор 24 непосредственно и на балансный модулятор 23 через фазосдвигающий каскад 26. С выходов балансных модуляторов 23 и 24 проиодулированные сигналы поступают соответственно на первый и второй входы сумматора 28, в котором происходит квадратурное сложение входных сигналов. На выходе сумматора 28 снимается высокочастбтный сигнал, амплитуда которого пропорциональна модулю вектора вибрации, а фаза несет информацию об yi- ловом положении вектора вибрации. Этот сигнал поступает на вход выпрямителя 27, с выхода которого снимается сигнал пропорциональный значениям модуля вектора вибрации, а затем - на вход суммирующего анализатора 6 с аналоговой памятью на коммутируемых емкостях для накопления. На первый и второй входы преобраза вателя 15 сдвига фаз во временной интервал поступают соответственно сигналы с выхода сумматора 28 и с выхода фазосдвигающего каскада 26. Сигнал с преобразователя 15 поступает на управляющий вход ключа 13, который коммутирует сигналы с выхода генератора 14 импульсов на первый вход счетчика 21 импульсов. Счетчик 21 работает следующим образом. По окончании каждого цикла счета счетчик 21 сбрасывается в нуль. Сра зу же на него подается предустановка с преобразователя 20 кода и в нем записывается код, несущий информацию о положении внутреннего кольца или сепаратора подшипника 2, а затем происходит заполнение счетчика 21 импульсами от генератора 1 При работе устройства в системе координат неподвижного кольца предустановка счетчика 21 не производится На выходе счетчика 21 формируется код соответствующий угловому положению вектора в неподвижной или вра щающейся, системе координат. Управление преобразователем 20 кода осуществляется от счетчика 16 или от счетчика 18 через переключатель 19. Счетчик 16 заполняется импульсами от датчика 5 в течение цик ла оборота внутреннего кольца, и пр завершении цикла сбрасывается в нул Счетчик 18 заполняется импульсами, вырабатываемыми блоком 17, на вход которого поступают сигналы от дополнительного датчика 7 контролирующего прохождение мимо него тел качения, в течение цикла оборота се паратора. При завершении каждого оборота сепаратора . счетчик 18 сбра сывается в нуль. Сигналы с выхода счетчика 21, ха рактеризующие угол вектора вибраЦии в неподвижной или вращающихся системах координат, поступают на вход дешифратора 22, который выраба тывает сигналы управления ключами, коммутирующими накопительные емкости в суммирующем анализаторе 6. В режиме вывод с выхода суммирующего анализатора 6 поступают си налы для индикации или регистрации накопленных значений модуля вектора по его угловому положению в неподвижной системе координат наружного кольца подшипника либо во вращающейся системе координат внутреннего кольца, либо во вращающейся системе координат сепаратора, с .целью выявления местонахождения дефектов. При необходимости получения более точных результатов вычислений предлагаемый пример выполнения устройства может быть реализован в . цифровом виде. 9 8 Использование для определения местонахождения дефектов значений модуля пространственного вектора вибрации, а также накопление значений не по угловому положению контролируемой детали, а по положению вектора в системе координат контролируемой детали повышает объективность и достоверность контроля, так как позволяет получить соответствие между числом накопленных значений модуля вектора, их положением в системе координат контролируемой детали и числом дефектов, а также их положением на контролируемой детали в объекте циклического действия. Изобретение имеет широкую область применения, поскольку позволяет выявлять дефекты не только тех деталей, движение которых синхронно с движением ведущего звена, но и перемещающихся несинхронно и по сложным траекториям: движения. формула изобретения J. Способ определения дефектов у объектов циклического действия, заключающийся в том, что преобразовывают сигнал вибрации в электрический сигнал, осуществляют усиление, фильтрацию и накопление сигнала в суммирующем анализаторе и преобразуют yi- ловое положение деталей в электрический сигнал, отличающий с я тем, что, с целью повышения достоверности определения местонахождения дефектов, определяют значения модуля пространственного вектора вибрации и значения его положений в системах координат подвижных и неподвижных деталей, накапливают значения модуля пространственного вектора вибрации по значениям его прложений в каждой из систем координат контролируемых деталей в течение нескольких циклов действия объекта и по величине максимумов накопленных значений модуля вектора и по соответствующим этим максимумам значений его положений в выбранной системе координат определяют местонахождение дефектов. 2. Устройство для осуществления способа по П.1, содержащее измерительный канал, включающий последовательно соединенные преобразователь вибраций, усилитель и полосовой фильтр, датчик углового положения де талей объекта и суммирующий анализатор, отличающееся тем, что, с целью повышения достоверное ти определения местонахождения дефек тов , оно снабжено по меньшей мере од ним дополнительным датчиком углового положения деталей объекта и одним дополнительным измерительным каналом блоком вычисления модуля вектора виб раций, блоком вычисления положения вектора вибраций, включающим ключ, генератор и преобразователь сдвига фаз, которые подключены к управляющим входам ключа счетчик углового положения детали, последовательно соединенные с дополнительным датчико углового положения деталей, блок преобразования частоты, дополнительный счетчик углового, .положения деталей, переключатель, дополнительный вход которого соединен через учетчик углового положения деталей с датчиком углового положения деталей, преобразователь кода, счетчик импульсов, вход которого соединен с выходом ключа, и дешифратор, выход которого соединен с входом сум мирующего анализатора, при этом блок вычисления модуля вектора вибраций включает основной и дополнительные модуляторы, к входам которых подключены полосовые фильтры, дополнительный генератор, фазосдвигающий каскад, вход которого соединен с выходом дополнительного генератора, другой выход которого соединен с входом дополнительного балансного модулятора, а выход фазосдвигающего каскада с входами преобразователя сдвига фаз и основного балансного модулятора, выпрямитель, выход которого соединен с дополнительным входом суммирующего анализатора, сумматор,.вход которого соединен с выходом баланс- ных модуляторов, а выход - с выпрямителем и другим входом преобразователя/сдвига фаз. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ № 2327015, :кл. k2 g , 1/03, 197. 2.Патент Великобритании № 1367773, кл, Н i О , 197 (прототип) .


| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в напряжение | 1983 |
|
SU1124360A1 |
| Цифровое весоизмерительное устройство | 1985 |
|
SU1276914A1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368857C1 |
| Устройство для вибродиагностики | 1983 |
|
SU1099219A1 |
| Устройство управления процессом резания | 1986 |
|
SU1393531A1 |
| Устройство для выявления дефектов подшипников | 1980 |
|
SU1059447A1 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
| РАДИОИНТРОСКОП | 1996 |
|
RU2084876C1 |
| Способ управления коррекцией эксцентриситета при расточке глубоких отверстий и устройство для его осуществления | 1985 |
|
SU1292984A1 |
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |