Изобретение относится к устройствам для регулирова1Н;Ия числа оборотов пидротурбин и представляет собой гидравлическую дистаидиОНную передачу для осуществления обратной связи между золотнико.м центр-обежнопо регулятора и золот1Ни«ом серволютора турбины.
Известные того же яазначения устройства, выполиенные с двумя цилищдрал1и двухстороднего дейстэия, подпоршневые полости которых соедИНены трубопроводами, обладают тем недостатком, что в случае утечки масла через зазоры или вследствие воздействия сил И нерции не исключена возможность смещения ведомого поршня; кроме того, 1из менение вязкости масла и подводимого давления искажает работу регулятора.
В описываемом ниже изобретении указанные .недостатки устранены тем, что поршни золотников датчика и нриемника гидропередачи снабжены дроссе.чируюншми винтовыми канавками.
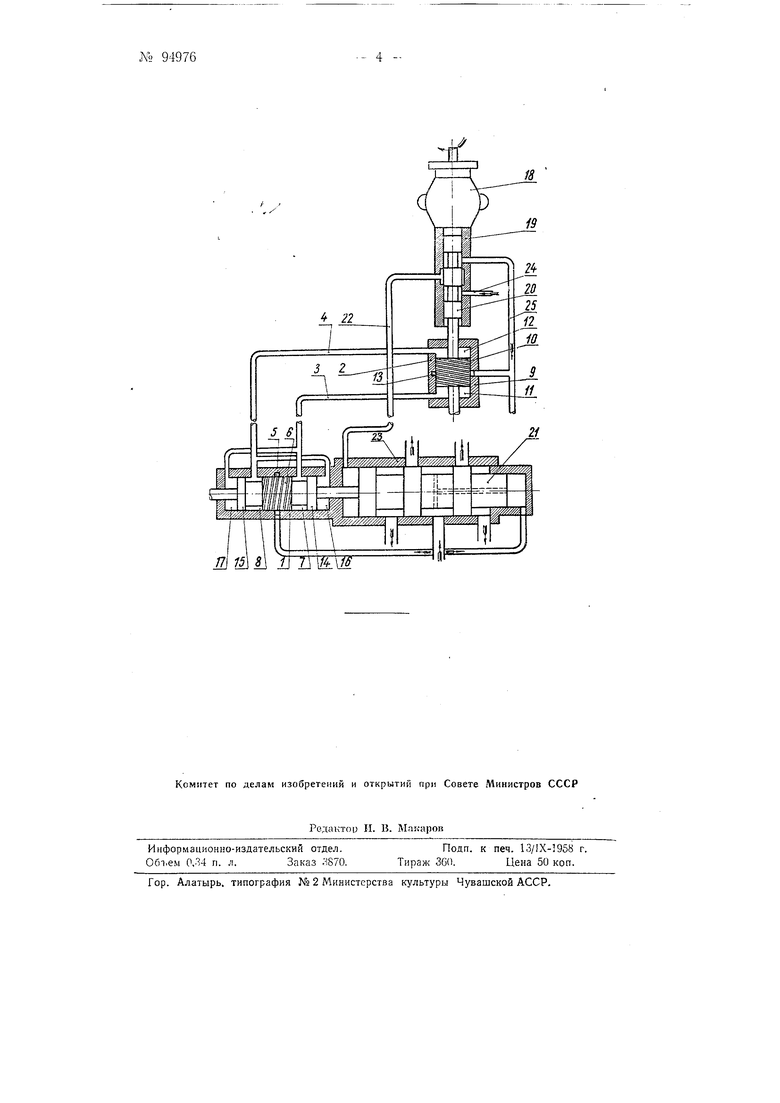
На чертеже изображена схема гидравлической передачи, используемой в качестве обратной связи дистанционной управлении главным золотником регулятора гидротурбины.
Гидравлическая передача состоит из датчика 1 я приемника 2, связанных двумя перепускными трубопроводами 3 к 4, к датч1ику 1 подводится под давлением масло (от масловоздушного котла или от насоса), которое от кольцевой канавки 5 в цилиндре датчика по В1интовой канавке ла поршне 6 движется вправо и влево. В результате потери напора пр:И движении масла по винтовой канавке давления в кольцевых выточках 7 Н 8 поршня 6 будут изменяться пр,и его смещении. Полости выточек 7 и 8 перепускными т)убопроводал1и 3 и 4 сообщены с приемником 2, состоящим из цилиндра 9 и ведомого поршня 10, на котором, также как ,ii на ведущем поршне 6, имеется винтовая канавка. По этой канавке масло, носту:1аюн1ее по трубопроводам 5 и
4 в полости и 11 12 приомника 2, проходит к кольцево) канавке 13 цилиндра 9 и «з нее сбрасывается в сливной бак.
Дейотвует пидравл1ичеокая передача следАЮщим образом.
Пусть в како1 1-то момент nopoiini преемника 1 н датчика 2 паходятся ;в среднем положении относительно кольцевых канавок. То1да давления в выточках 7 :и 5 п в полостях 11 и 12 раВНы, так как суммарная винтовых канавок и поршней 6 и 10 вправо и влево от кольцевых канавок 5 и 13 одинаiKoea и, следавате;1ьно, потерц папора и расходы масла также равны. Сместим поршень датчика влево. этом давление в выточке 7 повысится, а давление в выточке 8 понизится против первонача.нлюго, так как дл1ина винтовой канавки вправо от канавки 5 уменьшается, а влево-увеличится. Соответственная разность давлений создается в полостях И и 12 ,ика 2, что заставит поршень 10 смещатьс; вверх. По мере дв иження поршня 10 вверх давления в полостях 11 и 12 начнут выравниваться и движение П01ршня Прекратится, когда давления в нолостях 11м 12 и в выточках 7 т 8 полностью выравняются; расход масла, пропускаемый системой датч1И1К-приемник, при этом изменится, по сравнению с первоначальным. Таким образом, поршень 10 полностью следует смещениям поршня 6 и устапавливается так, что давления в выточках 7 И 8 и в полостях 11 м 12 окажутся равными. Однако поршень 10, следуя смешениям поршня 6, отстает от него во времени, это отставание тем больше, чем меньше масла пропускает система. С целью устранения этого недостатка н для возможности ма-коимального уменьшения расхода масла, потребляемого системой, датчик / снабжается двумя донолн.ительным.и поршнями 14 и 15. При этом полости 16 и 17 соединяются посредством трубопроводов 3 и 4 с полостями 11 и 12 приемника. Рабочая плошадь сечения полостей 16 и 17 при коэффициенте передачи, равном единице, должна равняться рабочей нлопиии полостей // и 12. П;-)и коэффициенте передачи, отличающемся от единицы, соответственио следует брать и соотношение рабочих полостей 16 и 17, 11 и 12. Наличие поршней 14 и /5 приводит к тому, что поршень 10 приемника должен практически мгиове;ппо следовать за сменхепием нор1ння 6 датчика /, а переток масла обеспечивает точность соответствия конечного положения поршня приемника.
Равновесное положение поршня прием ЦИК а не зависит от величины давления масла в подводящем трубопроводе, т. е. данная система гидропередачи не реагирует на колебания дав.леиия в котле, из которого берется масло для ее питания.
При движении масла по в;интовым канавкам поршней 6 и 10 потеря напора :пропорц,иональна длине канавок независимо от нх сечения и вязкости масла. Следовател1)НО, смещение поршня приемника данной системы гидропередачи не изменяется с изменением вязкости .масла.
С изменен ие.м давления и вязкости масла, а также И положения порошей датчика и пр иемника пропускаемый системой расход изменяется: наи;ме.ньший расход, когда Г10ршни датчика и приемника находятся в среднем положении отнооительно кольцевых канавок, а наИбольпшй расход-при крайних поло ж ен и я X п о р HI н е ii.
Восстапавливающее усилие па п 1 ием1ника при одном и том же смеихении его от равновесного положения зависит от положения поршней датчика и приемника отпосительио кольцевых канавок. В среднем положении поршней восстанавл1ивающее усилие меньше, чe в к 5айних положениях.
Для повышения точности передачи смещений необходимо, по воз.можности, снизить величину сил трения между nopjnneM W и стеной 1:И.линдра 9 приемника. В случае меоб.ходимост.и. очень высокой точности передачи смеп1ений целесообразно иметь вращающийся порnienb приемника.
11рсдлагаемаягидропередача
обеспечивает воэмож-ность получения резкого перемещения поршня п)|ИеМ:Н1и:ка опнооительно равновес ного полол ения с медленным последующим возв|)атом в положение )авновесия, что позволяет иелользовать ее в а1втоматических регуляторах для осу1цест1вле1ния обратной связи между золотнико:м сервомотора и золотнИКом датчика.
Маятник 18, втулка 19 и золотНИк 20 це 1тробежного регулятора и поршень 10 пр.иемника 2 помещаются на гидротурбине. Маятник приводится во вращение непосредственно от вала турбины. Главный золотник 21 сервомотора п датчик /, устаиавливаются в колонке управления регулятора. Положение главНого золотника 21 определяется давлением масла в трубке 22, соединяющей полость цил1индра 23 главного золотника с полостью втулк Я 19, пр.ИСоединеиной трубопроводОМ 24 к .масловоздущному котлу. При увеличении числа оборотов гидротурбины грузы маятлйка расходятся, втулка 19 приподнимается и соединяет трубку 22 со сливиой трубой 25. При этом главный золотник 21 смещается влево, что -вызывает движение сервомотора на закрытие доступа воды к турбине.
Движение главного золотника 21 через гидронередачу передается золотнику 20, который при этом пойдет вверх и, перекрыв проточку втулки 19, приостановит дальнейщее движение золотника 21. При снижении числа оборотов гидротурбины грузы маятника сблизятся, втулка 19 сместится вниз и соединит трубку 22 с масловоздущным котлом. При этом главный золотник 21 начнет двигаться вправо.
од lie времени о через гидрогк;)сдачу вызывая смещение вниз золотника , что пр:иведет к перекрытию проточки втулки 19 и прекращению движен1 я золотника 21.
Описанная система обеспечивает больнпю величину перестановочных усил:нй па главно.м зо-чотнике серBOiMOTOpa и дает четкую однозначную связь между полол ением главного золотника и числом оборотов гидротурбины.
Предмет изобретения
1.Гидравлическая дистанционная передача для осуществления обратной связи между золотником сервомотора и золотником датчика, состоящая из двух цилиндров двойного действия, подпорщневые полости которых соединены между собою перепускными трубопроводами, о т л и ч а ю 01 а я с я тем, что, с целью исключения возможности смещения ведомого поршня в случае утечкн масла через зазоры или вследствие действия на него сил инерции, порщни передачи снабжены винтовыми канавками, нричем подвод маСла к каьавке ведущего LOpiLHn производится чсрез кольцевую канавку цилиндра, расположенну о в его средней части, а отвод масла из полости цилиндра ведомого порщня производится через кольцевую канавку этого цилиндра, расположенную в его средней части .
2.Форма выполнения передачи по п. 1, о т л и ч а ю нд а я с я тем, что веду|ций поршень снабжен двумя кольцевыми выточками, расположенными ПО сторонам его винтовой канавки и сообщенными с перепускными трубопроводами.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛИТЕЛЬНОЕ УСТРОЙСТВО К ГИДРАВЛИЧЕСКОМУ КЛАПАНУ | 1938 |
|
SU56083A1 |
| Распределительный золотник для автоматического регулирования водяных турбин | 1929 |
|
SU13681A1 |
| Устройство для реверсирования винта с автоматическим изменением шага | 1942 |
|
SU67587A1 |
| Двигатель внутреннего сгорания с наддувом | 1979 |
|
SU840432A1 |
| МУФТА ИЗМЕНЕНИЯ УГЛА ОПЕРЕЖЕНИЯ НАЧАЛА ПОДАЧИ ТОПЛИВА | 1996 |
|
RU2109978C1 |
| Машина для непрерывного шелушения зерна | 1975 |
|
SU596279A2 |
| Газопоршневой двигатель электроагрегата | 2023 |
|
RU2802562C1 |
| УСТРОЙСТВО ЗАЩИТЫ ПОВОРОТНОЛОПАСТНОЙ ГИДРОТУРБИНЫ от РАЗГОНА | 1971 |
|
SU305780A1 |
| Регулятор скорости поворотно-лопастной гидротурбины | 1974 |
|
SU931942A1 |
| Регулятор частоты вращения для двигателя внутреннего сгорания с наддувом | 1985 |
|
SU1268768A1 |