Изобретение относится к средствам измерения частоты вращения и может быть использовано при автоматизации управления гидротурбинами.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ формирования сигнала fio частоте вращения вала агрегата путем выпрямления и последующего интегрирования сигнала тахогенератора, формирования импульсного сигнала и последующего его декодирования l .
Недостатком известного способа следует считать его несколько понижеЬную точность.
Цель изобретения - увеличение точ ности.
Для этого результат интегрирования умножают на коэффициент, меньший единицы, и затем сравнивают с выпрямленным сигналом тахогенератора, и формирование импульсного сигна ла ведут в моменты равенства нулю ре зультата сравнения.
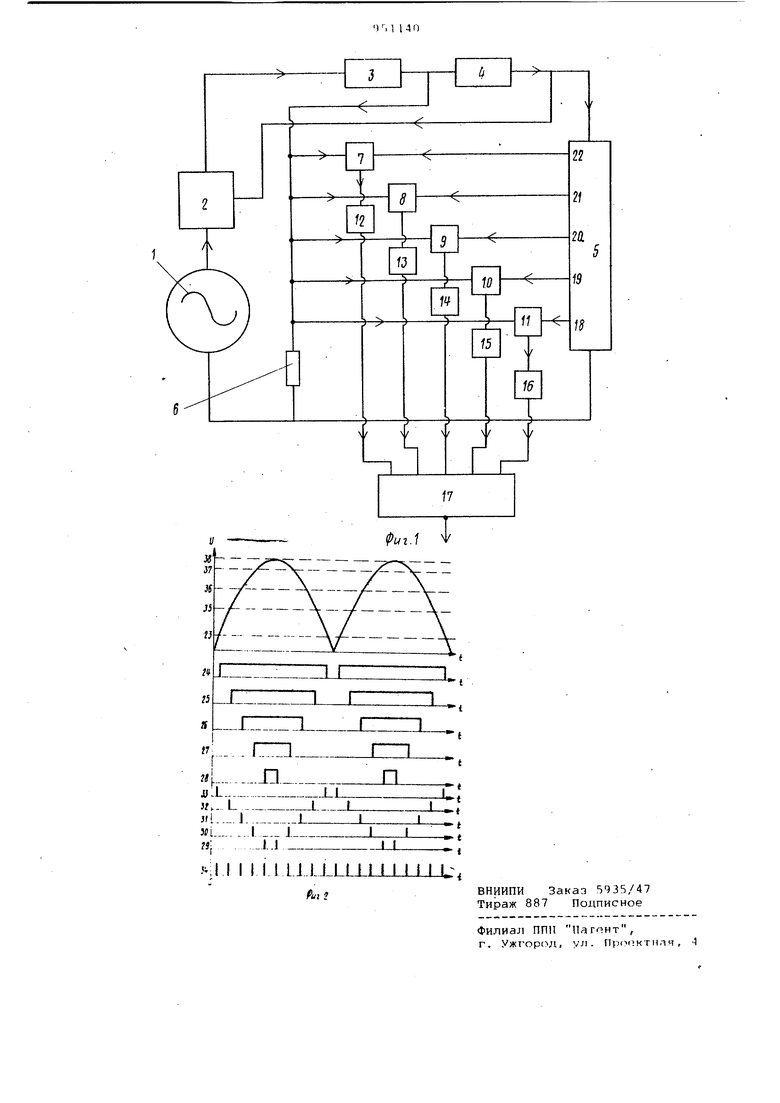
На фиг.1 приведена схема реализации данного способа; на фиг,2 - временные диаграммы работы по данному способу.
Тахогенератор 1 (фиг.1) через регулирующий блок 2, в качестве которого особенно удобно применить полевой транзистор с омическими переходами истока и стока, выпрямитель 3 и интегрирующее звено 4 соединен с входом многоступенчатого (в данном случае пятиступенчатого) делителя 5j кроме того, выход регулирующего
10 блока 2 также через выпрямитель 3 нагружен на резистор 6 и соединен с первыми (левыми) входами потенциаль ных компараторов 7-11, которые через дифференцирующие звенья 12-16 (в
15 качествеЭТИХ звеньев особенно удобно использовать импульсные трансформаторы, вторичная обмотка которых подключены к двухполупериодному выпрямителю) подключены к входам 2 дизъюнктора 17, а вторые (правые) входы компараторов соединены с выходами 18-22 делителя 5.
При достижении на резисторе б уровня сигнала, равного напряжению -. 25 на выходе 18 делителя 5 (уровень .23 на диаграмме фиг. 2, где показан случай применения двухполупериодного выпрямителя), сигнал на выходе Kcwoiaратора 11 изменяет сёое значение с 30 логического О на логическую 1, .1 при уменьшении сигнала на резисторе 6 до уровня, меньшего, чем напряжение на выходе 18 компаратора 5 на выходе этого компаратора снова устанавливается уровень логического О (диаграгАма 24 на фиг.2). Ангшоги чно работают и остальные компараторы (диаграммы 25-28 на фиг.2). Поскольку на выход каждого из компараторов подключены дифференцирующие звенья 12-16, то при каждом изменении уров 1ня на выходах компараторов происхо;дит формирование импупьсного сигнал на выходе соответствующего дифференцирующего звена (диаграммы 29-33 на фиг.2. Поскольку же выходы всех диф ференцирующих звеньев соединены с входами 1 дизъюнктора 17, то на его выходе при вращении тахогенератора формируется время - импульсная последовательность сигналов, изображенная на диаграмме 34, использующая ся для управления последующими звеньями схемы. При падении выходного напряжения генерируемого тахогенератором сигнала происходит одновременное уменьшение уровней 23-38 сигналов на выходах делителя 5. Поэтому распределение импульсов на выходе дизъюнктора 17 во времени зависит практически только от частоты вращения вала агрегата. При питании выпрямителя от всех фаз тахогенератора постоянная времени интегрирующего звена 4 может быть уменьшена во столько раз, сколько фаз используется для выпрямления. Если значение генерируемого тахогенератором сигнала изменяется в широком диапазоне и достигает уровней, недопустимых для входных цепей сравнивающих органов, то амплитудное значение этого сигнала ограничивают при помощи управляемого выходным напряжением интегрирующего звена 4 регулирующего блока 2, не изменяя формы генерируемого сигнала. Чтобы достичь этого, можно использовать в регулирующем блоке неполярный линейный элемент, в частности высоковольтный полевой транзистор с омическими канальными переходами, на затвор которого с интe pиpyющeгo звена 4 подают напряжение через схему отрицательной обратной связи с пороговыми свойствами. При этом дополнительно повышается надежность работы схемы в целом, а, значит, и гидротурбины. Таким образом, данный способ позволяет резко увеличить разрешающую способность измерительной системы, в том числе и в переходных режимах гидротурбины. Формула изобретения .Способ формирования сигнала по частоте вращения вала агрегата, преимущественно гидротурбины, путем выпрямления н последующего интегрирования сигналатахогенератора, формирования импульсного сигнала и последующего его декодирования, отличающийся тем, что, с целью увеличения точности, результат интегрирования умножают на коэффициент, меньший единицы, и затем сравнивают с выпрямленным сигналом тахогенератора и формирование импульсного сигнала ведут в моменты равенства нулю результата сравнения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 678416,кл. G 01 Р 3/481, 1977.