(54) АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ОТКОРМОМ Изобретение относится к сельскому хозяйству, в частности к откорму животных на животноводческих фермах и комплексах. Известна автоматизированная система управления откормом животных, включающая устрой ство управления процессом приготовления корма, связанное с устройством его раздачи и дозирования 1. Недостатком известной системы является низ кая эффективность расхода корма. Наиболее близким по технической сущности к предложенной системе является система, вкл чающая устройство управления приготовлением, раздачей и дозированием кормов, устройство управления микроклиматом в помещении, устройство управления подачей и дозированием воды и устройство взвешивания животных 2 Недостатком данной системы является недостаточная эффективность расхода корма. Целью изобретения является повыщение эффективности расхода корма. Поставленная цель . достигается тем, что она снабжена оптимизатором, причем входы оптимизатора соединены с выходами устройства
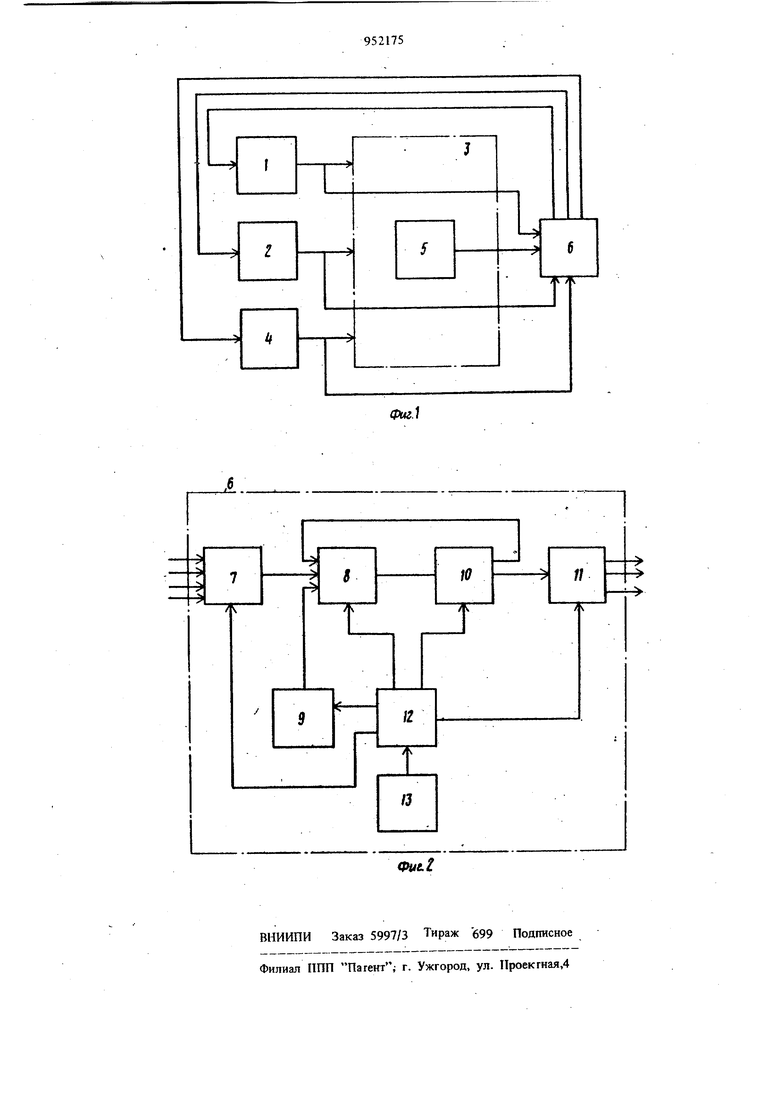
ЖИВОТНЫХ управления приготовлением, раздачей и дозирсь ванием кормов, устройства управления микроклиматом в помещении, устройства управленвя подачей и дозированием воды и устройства взвешивания животных, при этом выходы оптимизатора соединены с входами устройства управления приготовлением, раздачей и дозированием кормов, устройства управления микроклиматом в помещении и устройства подачей и дозированием воды.. На фиг. 1 представлена блок-схема системы, на фиг. 2 - функциональная схема оптимизатора. Автоматизированная система управления включает устройство 1 управления приготовлением, раздачей и дозированием кормов, устройство 2 управления микроклиматом в помещении 3, устройство 4 управления подачей и дозированием воды, устройство 5 взвешивания животных, оптимизатор 6, который имеет коммутатор 7 сигналов, блок 8 памяти, блок 9 ручного ввода информации, логический блок 10, блок 11 вывода управляющих команд, блок 12 выработки управ395ЛЯЮ1ЦИХ команд, временной блок 13, при этом входы оптимизатора 6 соединены с выходами устройства управления приготовлением, раздачей и дозированием кормов, устройства 2 управления микроклиматом в помещении 3, устройства 4 управления подачей и дозированием воды и устройства 5 взв шивания животных, а выходы,оптимизатора соединены с входами устройства I управления приготовлением раздачей и дозированием кормов, устройства 2 управления микроклиматом в помещении 3 и устройства 4 управления подачей и дозированием воды, а входы блока памяти 8 связаны с выходами коммутатора 7 сигналов, логического блока 10, бло ка 9 ручного ввода информащш и блока 12 выработки управляющих команд, другими выходами связанного с блоком 9 ручного вв да информации, с коммутатором 7 сигналов, блоком 10 памяти и блоком И вывода ynpa ляющих команд, а входом - с временным, блоком 13, причем Другой вход логического блока 10 связан с выходом блока 8 памяти, а другой выход его соединен с одноименным входом блока 11 вывода управляющих команд. Система работает следующим образом. В предложенной системе процесс откорма животных представлен в виде многоциклового процесса, на определенном цикле которого временной блок 13 подает сигнал в блок 12 выработки управляющих команд. Блок 12 выработки управляющих команд, по указанному сигналу посредством коммутатора 7 сигналов, считьшает информацию о технологических параметрах процесса откорма животных с устройства 1 управления приготовлением, раздачей и дозированием кормов, устройства 2 управления микроклиматом помещения 3, устройства 4, управления подачи и дозированием воды и устройства 5 о весе животных. Устройство 5 производит непрерьш ное измерение веса, на которых постоянно находится контрольная группа однородных по возрасту и среднему весу, с остальным поголовьем, животных. Считанная информация с указанных устройств записывается в блоке 8 памяти, откуда она, по окончании текущего цикла процесса и наличии в блоке 12 выработки управляющих команд, сигнала с временного блока 13, передается в логический блок 10 вместе с ин формацией ранее записанной в блок 8 памяти посредством блока 9 ручного ввода информации. Логический блок 10 производит идентификацию целевой функции (по полученной и заданной вручную информации), которая численно выражается, например, привесом животных, т.е. осуществляется определение зависимости привеса животных за данный цикл управления от их веса в начале данного цикла и произведенного в этом цикле управления устройствами системы. Затем логический блок 10 на основании полученного результата (расчетов, выполненных в предьщущих циклах управления и заданной информации) осуществляет определение управляющих воздействий на устройства системы на последующий цикл процесса с таким условием, чтобы при соблюдении накладываемых на процесс ограничителей технологического и экономического характера максиммизировать критерий качества управления откормом на весь период. Вычисленные логическим блоком 10 оптимальные значения управляющих воздействий последующего цикла процесса запоминаются блоком 8 и подаются в блок 11 вывода управляющих команд. Вывод у казанных управляющих воздействий на устройства системы производится по командам блока 12 выработки управляющих команд, при поступлении на его вход .сигнала с временного блока 13 о начале следующего цикла процесса. В дальнейшем циклы повторяются аналогично до окончания всего процесса откорма животных. Таким образом система обеспечивает повышение эффективности расхода корма. Формула изобретения Автоматизированная система управления откормом животных, включающая устройство управления приготовлением, раздачей и дозированием кормов, устройство управления микроклиматом в помещении, устройство управления подачей и дозированием воды и устройство взвешивания животных, отличающаяся тем, что, с целью повышения эффективности расхода корма, она снабжена оптимизатором, причем входы оптимизатора соединены с выходами устройства управления приготовлением, раздачей и дозированием кормов, устройства управления микроклиматом в помещении, устройства управления подачей и дозированием воды и устройства взвешивания животных, при этом выходы оптимизатора соединены с входами устройства управления приготовлением, раздачей и дозированием кормов, устройства управления микроклиматом в помещении и устройства управления подачей и дозированием воды. Источники инАормации принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 563946, кл. А 01 К 5/02, 1977. 2.Краусп В. Р. Комплексная автоматизация в промышленном животноводстве. М., Машиностроение, 1980, с. 51-58 (прототип).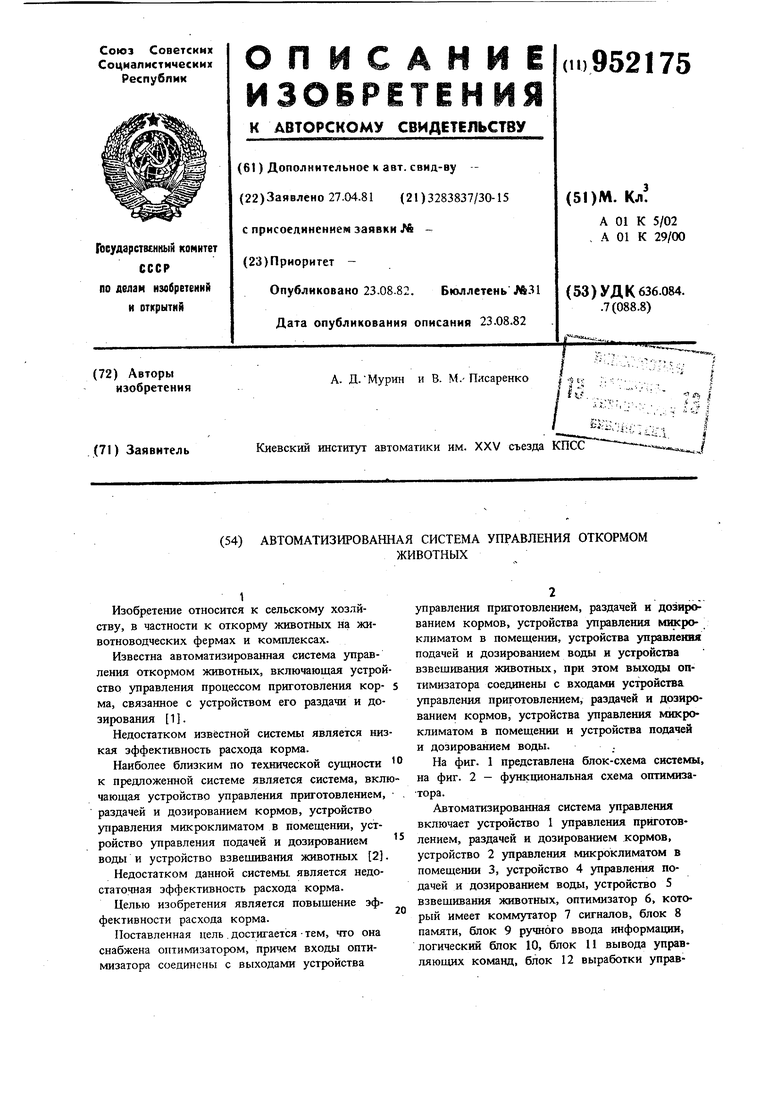
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования параметров микроклимата животноводческих помещений | 1982 |
|
SU1044246A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЕХНОЛОГИЧЕСКИ ОПТИМАЛЬНОГО НАЧАЛЬНОГО МОМЕНТА ВРЕМЕНИ ЭКОНОМИЧНОЙ КОРРЕКЦИИ РЕЖИМА КОРМЛЕНИЯ ЖИВОТНЫХ И ПТИЦЫ | 2012 |
|
RU2534510C2 |
| УСТРОЙСТВО СОСТАВЛЕНИЯ ЭКОНОМИЧНОГО КОРМОВОГО РАЦИОНА И ЭКОНОМИЧНОГО КОРМЛЕНИЯ ЖИВОТНЫХ И ПТИЦ | 2010 |
|
RU2462864C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ ПТИЦЫ | 2007 |
|
RU2340172C1 |
| Система индивидуальной раздачи концентрированных кормов | 1990 |
|
SU1750520A1 |
| ЖИЛИЩНО-ПРОИЗВОДСТВЕННАЯ ВЕРТИКАЛЬНАЯ ФЕРМА | 2010 |
|
RU2436917C1 |
| Устройство для раздачи жидких кормов | 1990 |
|
SU1743511A1 |
| УСТРОЙСТВО ВЗАИМОСВЯЗАННОГО ЭКОНОМИЧЕСКИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ПРОЦЕССАМИ КОРМЛЕНИЯ И МИКРОКЛИМАТА ПРИ ВЫРАЩИВАНИИ ЖИВОТНЫХ И ПТИЦЫ В УСЛОВИЯХ ЗАГАЗОВАННОСТИ И ЗАПЫЛЕННОСТИ | 2014 |
|
RU2572539C1 |
| Способ автоматизированной выдачи корма животным и устройство для его осуществления | 1987 |
|
SU1690633A1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |