Изобретение относится к сельскому хозяйству, к области молочного животноводства, может быть использовано для выпойки молодняка сельхозжиBOTHых заменителями цельного молока и найти применение как на небольших фермах, где одним устройством необходимо выпаивать разновозрастных животных, так и на крупных фермах, в частности и профилакториях для ослабленных животных, которых необходимо кормить кормами разного состава.
Целью изобретения является повышение точности дозирования корма путем учета индивидуальных особенностей животных.
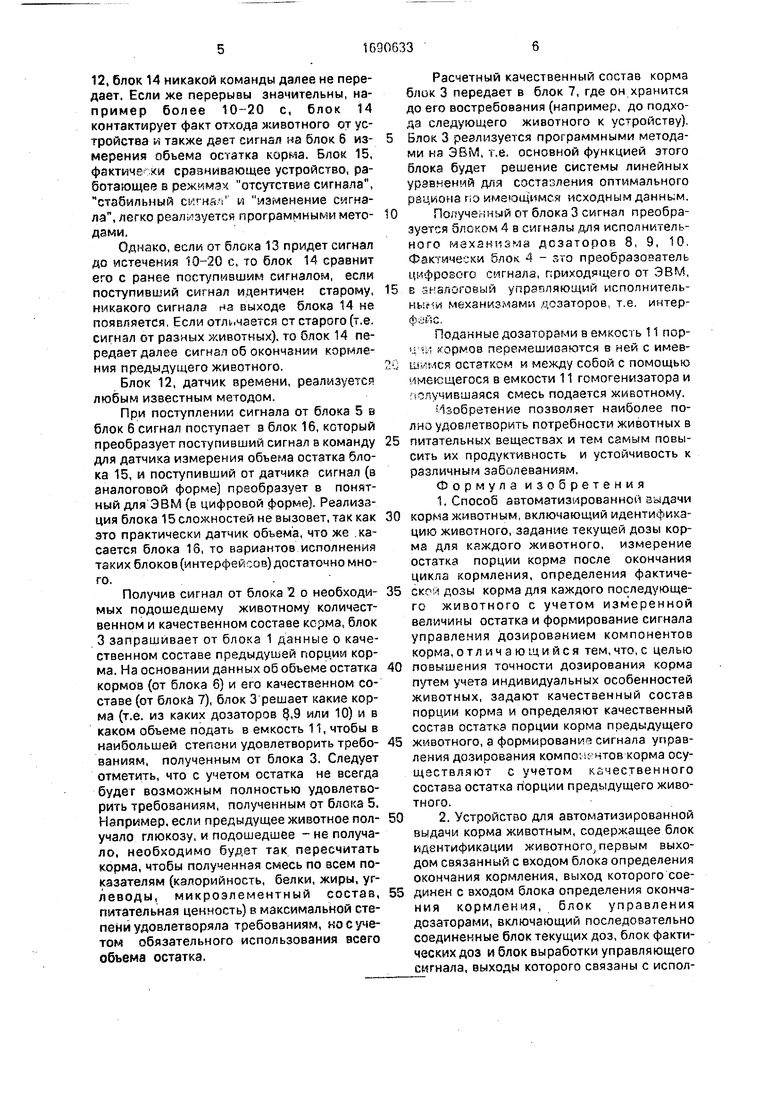
На фиг.1 изображена структурная схема устройства; на фиг.2 - то же, блока определения окончания кормления; на фиг.З - то же, блока измерения объема остатка.
Устройство включает блок 1 идентификации подошедших животных, блок 2 текущих доз, блок 3 фактических доз, блок 4 выработки управляющих сигналов, блок F
определения окончания кормления, блок 6 измерения объема остатка корма в выпеч- ном устройстве, блок 7 фактического качественного состава порции корма, дозаторы 8, 9,10 и выпоечную емкость 11, т.е. ту емкость, куда поступают отдозированные дозаторами 8, 9, 10 корма перед подачей его животному из выпоечного элемента (например, соски), снабженную гомогенизатором. Выходы блока 1 соединены с входами блока определения окончания кормления. Выход блока 5 определения окончания кормления соединен с входом блока 6 измерения объема остатка порции корма, а входы блока 3 подключены к выходам блоков 2, 6, 7, при этом выходы блока 3 связаны с входами блоков 4,7.
Блок 5 определения окончания кормления включает в себя блок-таймер 12, блок 13 наличия и стабильности сигнала и блок 14 определения отхода животного, причем входы блока 14 связаны с блоков 12 и 13.
Блок 6 измерения объема остатка корма включает в себя датчик объема 15 и исполнительно-преобразовательный блок 16, причем вход и выход блока 15 связаны соответственно с выходом и входом блока 16.
Блок 2 текущих доз - это память ЭВМ. В нее закладываются данные о том;какому животному (по номеру животного) следует выдать сколько корма и какого качественного состава. Блок памяти ЭВМ на запрос, поступивший в блок, направляет запрошенные данные по адресу, указанному в запросе, в данном случае в блок 3,
Следует отметить, что при выпойке животных заменителем цельного молока в качестве качественных характеристик корма могут выступать концентрация (она различна для животных разного возраста), наличие добавок глюкозы (даются ослабленным животным, дозирование глюкозы производится индивидуально каждому животному). Именно эти данные (объем дозы, концентрация дозы, наличие и размеры добавок глюкозы) определенные для каждого животного хранятся в блоке 2 текущих доз и выдаются им по поступлению сигнала от блока 1 идентификации животных.
Блок 4 выработки управляющих сигналов - это преобразователь цифрового сигнала, поступающего от блока 3 в аналоговые сигналы, необходимые для управления исполнительными механизмами дозаторов 8, 9,10.
Качество остатка и добавок кормов в емкости для выпойки животных учитывается до этого блока . Блок 4 - это интерфейс.
Блок 7 фактического качественного состава корма - это блок памяти. В этот блок поступают данные о фактическом качественном составе порции корма, которая была
выдана животному, данные эти выдаются по запросу блока 3 и после выдачи стираются, На их место записываются данные, вычисленные блоком 3 для следующего животного.
0 Фактически выданная доза по своему качественному составу может отличаться от той, которую задали в блоке 2. Такое может произойти, например, если предыдущее животное, которому полагается выдать
5 глюкозу с кормом, не доело свою порцию. При этом следующая выдаваемая порция (она выдается с учетом остатка) будет содержать глюкозу, хотя этому животному глюкоза может и не полагается .
0 Дозаторы 8,9,10 дозируют каждый свой компонент корма, Например, дозатор 8 - концентрированный заменитель цельного молока, дозатор 9 - воду, с помощью которой заменитель цельного молока доводится
5 до нужной концентрации, дозатор 10-глюкозу.
Емкость 11 выполнена аналогично тому, как она выполнена в устройствах фирмы Cattie-Code. В емкость 11, снабженную
0 одной соской, подаются дозаторами 8, 9, 10 компоненты корма и гомогенизатор (может быть обычный пропеллерный) производит размешивание и гомогенизацию поступивших в емкость компонентов и остатка если
5 он имеется в емкости.
Устройство работает следующим образом.
При подходе животного к блоку 1 идентификации он производит идентификацию
0 животного и сообщает номер (код) животного в блоки 2 и 5. В качестве блока 1 может быть использовано существующее устройство, применяемое фирмой Cattle-Code для идентификации коров. Блок 2 текущих
5 доз сообщает записанные в нем характеристики дозы корма (объем и качественный состав) для идентифицированного животного в блок 3, Блок 15 передает в блок 14 сигнал об изменении номера подошедшего
0 животного и последний, если ранее не принимал решения об измерении объема остатка кормов, дает такой сигнал на блок 6 измерения объема остатка.
Блок 15 не только сравнивает сиыал с
5 поступившим ранее, Он также сообщает в блок 14 и об отсутствии сигнала (т.е. о том , что животное отошло от устройства). В том случае, если перерывы незначительны, а длительность их блок 14 может оценить пс данным, поступающим от блока-таймера
12, блок 14 никакой команды далее не передает. Если же перерывы значительны, например более 10-20 с, блок 14 контактирует факт отхода животного от устройства и также дает сигнал на блок 6 из- мерения обьема остатка корма. Блок 15, фактиче ки сравнивающее устройство, работающее s режимах отсутствие сигнала, стабильный скгнёг: и изменение сигнала, легко реализуется программными мето- дами.
Однако, если от блока 13 придет сигнал до истечения 10-20 с, то блок 14 сравнит его с ранее поступившим сигналом, если поступивший сигнал идентичен старому, никакого сигнала из выходе блока 14 ке появляется, Если отличается ст старого (т.е. сигнал от разных животных), то блок 14 передает далее сигнал об окончании кормления предыдущего животного.
Блок 12, датчик времени, реализуется любым известным методом.
При поступлении сигнала от блока 5 в блок 6 сигнал поступает в блок 16, который преобразует поступивший сигнал в команду для датчика измерения объема остатка блока 15, и поступивший от датчик сигнал (в аналоговой форме) преобразует в понятный для ЭВМ (в цифровой форме). Реализз- ция блока 15 сложностей не вызовет, так как это практически датчик объема, что же касается блока 16, то вариантов исполнения таких блоков (интерфейсов) достаточно много.
Получив сигнал от блока 2 о необходи- мых подошедшему животному количественном и качественном составе ксрма, блок 3 запрашивает от блока 1 данные о качественном составе предыдушей порции корма. На основании данных об объеме остатка кормов (от блока 6) и его качественном составе (от блока 7), блок 3 решает какие корма (т.е. из каких дозаторов §,9 или 10) и в каком объеме подать в емкость 11, чтобы в наибольшей степени удовлетворить требо- ваниям, полученным от блока 3. Следует отметить, что с учетом остатка не всегда будет возможным полностью удовлетворить требованиям, полученным от блока 5. Например, если предыдущее животное пол- учало глюкозу, и подошедшее - не получало, необходимо будет так пересчитать корма, чтобы полученная смесь по всем показателям (калорийность, белки, жиры, углеводы, микроэлементный состав, питательная ценность) в максимальной степени удовлетворяла требованиям, но с учетом обязательного использования всего обьема остатка.
Расчетный качественный состав корма блок 3 передает в блок 7, где он хранится до его востребования (например, до подхода следующего животного к устройству). Блок 3 реализуется программными методами на ЭВМ, i.e. основной функцией этого блока будет решение системы линейных уравнений для составления оптимального рациона по имеющимся исходным данным.
Полученный от блока 3 сигнал преобразуется блоком 4 в сигналы для исполнительного механизма дозаторов 8, 9, 10. Фактически блок 4 - это преобразователь цифрового сигнала, приходящего от ЭВМ, в дрзпоговый управляющий исполнительными механизмами дозаторов, т.е. интерфейс
Поданные дозаторами в емкост ь 11 пор- , v. кормов перемешиваются в ней с имев- iiv/ мся остатком и между собой с помощью имеющегося в емкости 11 гомогенизатора и .учившаяся смесь подается животному.
Изобретение позволяет наиболее полно удовлетворить потребности животных в питательных веществах и тем самым повысить их продуктивность и устойчивость к различным заболеваниям.
Формула изобретения
1.Способ автоматизированное выдачи корма животным, включающий идентификацию животного, задание текущей дозы корма для каждого животного, измерение остатка порции корма после окончания цикла кормления, определения фактиче- дозы корма для каждого последующего животного с учетом измеренной величины остатка и формирование сигнала управления дозированием компонентов корма, отличающийся тем, что, с целью повышения точности дозирования корма путем учета индивидуальных особенностей животных, задают качественный состав порции корма и определяют качественный состав остатка порции корма предыдущего животного, а формирована сигнала управления дозирования компо:.; нтов корма осу- ществляют с учетом качественного состава остатка порции предыдущего животного.
2.Устройство для автоматизированной выдачи корма животным, содержащее блок идентификации животного, первым выходом связанный с входом блока определения окончания кормления, выход которого соединен с входом блока определения окончания кормления, блок управления дозаторами, включающий последовательно соединенные блок текущих доз, блок фактических доз и блок выработки управляющего сигнала, выходы которого связаны с исполнительными механизмами соответствующих дозаторов компонентов корма, а второй выход блока идентификации животных связан с входом блока текущих доз, о т- личающееся тем, что, с целью повышения точности дозирования корма путем учета индивидуальных особенностей животных, оно снабжено блоком фактического качественного состава порции корма, соединенным с дополнительными входом и выходом блока фактических доз и выпоечной емкостью с гомогенизатором, сообщенной с дозаторами компонентов корма.

Изобретение относится к сельскому хозяйству, к области животноводства, и может найти применение при выпойке молодняка сельхоэживотных заменителями цельного молока на небольших фермах и для ослабленных животных на крупных фермах. Цель изобретения - повышение точности дозирования корма путем учета индивидуальных особенностей животных. При подходе животного к устройству блок идентификации передает сигнал о номере животного в блок 2 текущих доз и блок 5 определения оконча-. чкс кормления, Блок 2 екущих доз направляет в блок 3 фактических доз данные о необходимых животному объеме и качественном составе корма. Блок 6 измерения объема остатка корма, срабатывающий по сигналу от блока 5, передает в блок 3 данные об объеме остатка корма, а блок 7 фактического качественного состава-данные о фактическом качественном составе предыдущей порции корма, т.е. о качественном составе остатка. На основании этих данных блок 3 подбирает оптимальный состав корма, выдаваемого животному, и дает команду на выдачу дозаторами 8, 9. 10 необходимых количеств компонентов корма. Блок выработки управляющего сигнала преобразует эти команды в сигналы, по которым исполнительные механизмы дозаторов 8, 9, 10 осуществляют отпуск ком понентов корма в емкость 11. Емкость 11 снабжена гомогенезатором и элементами, через которые корм поступает к животным. 2 с. п. ф-лы, 3 ил. Ё
||
Фиг 2
0U2.7
КВФД
| Устройство для автоматизированной оценки физиологического состояния животных в процессе кормления | 1986 |
|
SU1607756A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
