(54) РАБОЧИЙ ОРГАН ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган для образования котлованов | 1982 |
|
SU1084366A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2012 |
|
RU2501930C2 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 1997 |
|
RU2180697C2 |
| УДАРНОЕ УСТРОЙСТВО | 1991 |
|
RU2024676C1 |
| Установка для подводного уплотнения грунтов | 1984 |
|
SU1300091A1 |
| Трамбовка | 1982 |
|
SU1043254A1 |
| Устройство для образования скважин | 1978 |
|
SU747938A1 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ ГРУНТА | 2002 |
|
RU2215849C1 |
| ВИБРОВОЗБУДИТЕЛЬ | 1990 |
|
RU2023813C1 |
| Рабочий орган для выштамповыванияКОТлОВАНОВ | 1979 |
|
SU837996A1 |




Изобретение относится к строительству и может быть использовано в устройствах для ударного лотнения грунта под фундаменты зданий и сооружений.
Известны устройства для уплотнения грунта, включакмцие базовый грузоподъемный механизм и рабочий орган в виде сплошной трамбующей плиты, круглый в плане. Рабочий орган подвешивают к стреле базового механизма непосредственно на троссе. Уплотнение производят в соответствии с технологической схемой трамбования tl.
Схема трамбования предусматривает несколько циклов. В первом цикле, состоящем из нескольких полос следов по одному следу наносится 2-3 удара. При этом в результате заглубления рабочего органа в грунт между следами образуются секторы островки из неуплотненного грунта, которые выступают над поверхностью уровня следа .рабочего органа. Во втором цикле трамбование ведут со смещением следа на половину диаметра так, чтобы рабочий орган взаимодействовал с этими выступс1ми. Таким образом, при втором цикле днище рабочего органа всегда взаимодействует с грунтовым основанием, имеющим перепады и уклоны.Это затрудняет повторный захват рабочего органа для последующего подъема. Кроме того, из-за перепадов происходит перекос рабочего органа, он сползает со своего следа. В данном случае рабочий орган производит удар
10 с вращением вокруг своего центра масс и разрыхляет поверхностный слой. Известно также устройство, в котором для исключения разрыхления грунта вводится шабот (передающая плита),
15 В этом устройстве удар рабочего органа осуществляется не по грунту, а по шаботу. Шабот является промежуточным телом, которое воспринимает удар от рабочего органа и передает его 20 грунту. Шабот снижает перенапряжения, которые приводят к разуплотнению верхнего слоя грунта.
Однако он снижает величину не
25 только контактных напряжений, но и напряжений действующих в глубине слоя 2.
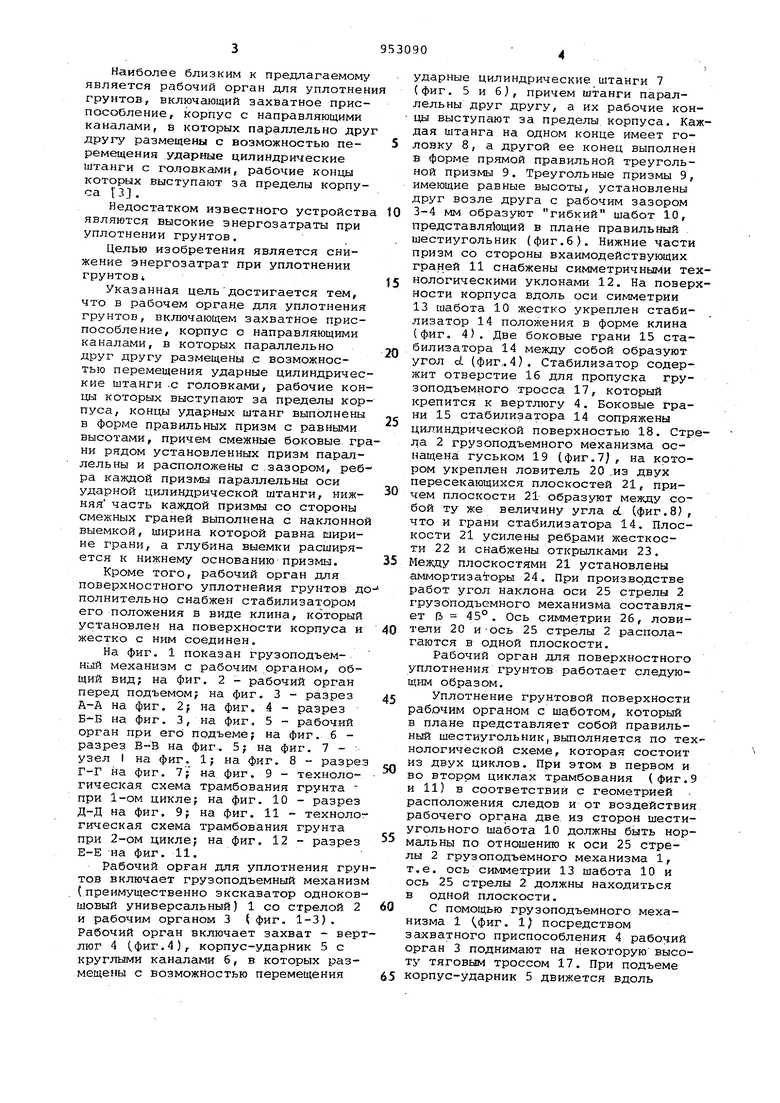
Недостатком такого устройства является повышенная энергоемкость про30цесса уплотнения грунта. Наиболее близким к предлагаемому является рабочий орган для уплотнен грунтов, включающий захватное приспособление, корпус с направляющими каналами, в которых параллельно дру другу размещены с возможностью перемещения ударные цилиндрические штанги с головками, рабочие концы которых выступают за пределы корпуса 3, Недостатком известного устройств являются высокие энергозатраты при уплотнении грунтов. Целью изобретения является снижение энергозатрат при уплотнении грунтов I Указанная цельдостигается тем, что в рабочем органе для уплотнения грунтов, включающем захватное приспособление, корпус о направляющими каналами, в которых параллельно друг другу размещены .с возможностью перемещения ударные цилиндричес кие штанги .с головками, рабочие кон цы которых выступают за пределы кор пуса, концы ударных штанг выполнены в форме правильных призм с равными высотами, причем смежные боковые гр ни рядом установленных призм параллельны и расположены с.зазором, реб ра каждой призмы параллельны оси ударной цилиндрической штанги, нижняя часть каждой призмы со стороны смежных граней выполнена с наклонно выемкой, ширина которой равна ширине грани, а глубина выемки расширяется к нижнему основанию-призмы. Кроме того, рабочий орган для поверхностного уплотнейия грунтов д полнительно снабжен стабилизатором его положения в виде клина, который установлен на поверхности корпуса и жестко с ним соединен. На фиг. 1 показан грузоподъемный механизм с рабочим .органом, общий вид; на Фиг. 2 - рабочий орган перед подъемом; на фиг, 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б--Б на фиг. 3, на фиг. 5 - рабочий орган при егсэ подъеме; на фиг. б разрез В-В на фиг.. 5; на фиг. 7 - узел f на фиг. 1; на фиг. 8 - разре на фиг. 7; на, фиг. 9 - технологическая схема трамбования грунта при 1-ом цикле; на фиг. 10 - разрез Д-Д на фиг. 9; на фиг. 11 техноло гическая схема трамбования грунта при 2-ом цикле; на фиг. 12 - разрез Е-Е -на фиг. 11. Рабочий орган для уплотнения гру тов включает грузоподъемный механиз (преимущественно экскаватор одноков шовый универсальный) 1 со стрелой 2 и рабочим органом 3 ( фиг. 1-3). Рабочий орган включает захват - вер люг 4 (.фиг.4), корпус-ударник 5 с круглыми каналами б, в которых размещены с возможностью перемещения ударные цилиндрические штанги 7 (фиг. 5 и б), причем штанги параллельны друг другу, а их рабочие концы выступают за пределы корпуса. Каждая штанга на одном конце имеет головку 8, а другой ее конец выполнен в форме прямой правильной треугольной призмы 9. Треугольные призмы 9, имеющие равные высоты, установлены друг возле друга с рабочим зазором 3-4 мм образуют гибкий шабот 10, представляющий в плане правильный шестиугольник (фиг.б). Нижние части призм со стороны вхаимодействующих граней 11 снабжены симметричными технологическими уклонами 12. На поверхности корпуса вдоль оси симметрии 13 шабота 10 жестко укреплен стабилизатор 14 положения в форме клина (фиг. 4). Две боковые грани 15 стабилизатора 14 между собой образуют угол ci (фиг,.4). Стабилизатор содержит отверстие 16 для пропуска грузоподъемного тросса 17, который крепится к вертлюгу 4. Боковые грани 15 стабилизатора 14 сопряжены цилиндрической поверхностью 18. Стрела 2 грузоподъемного механизма оснащена гуськом 19 (фиг.7, на котором укреплен ловитель 20 .из двух пересекающихся плоскостей 21, причем плоскости 21 образуют между собой ту же величину угла dL (фиг.8) , что и грани стабилизатора 14. Плоскости 21 усилены ребрами жесткости 22 и снабжены открылками 23. Между плоскостями 21 установлены ам лортизаторы 24. При производстве работ угол наклона оси 25 стрелы 2 грузоподъемного механизма составляет fi 45°. Ось симметрии 26, ловители 20 и-ось 25 стрелы 2 располагаются в одной плоскости. Рабочий орган для поверхностного уплотнения грунтов работает следующим образом. Уплотнение грунтовой поверхности рабочим органом с шаботом, который в плане представляет собой правильный шестиугольник,выполняется по технологической схеме, которая состоит из двух циклов. При этом в первом и во втором циклах трамбования (фиг.9 и 11) в соответствий с геометрией расположения следов и от воздействия рабочего органа две из сторон шестиугольного шабота 10 должны быть нормальны по отношению к оси 25 стрелы 2 грузоподъемного механизма 1, т.е. ось симметрии 13 шабота 10 и ось 25 стрелы 2 должны находиться в одной плоскости. С помощью грузоподъемного механизма 1 фиг. l посредством захватного приспособления 4 рабочий орган 3 поднимают на некоторую высоту тяговым троссом 17. При подъеме корпус-ударник 5 движется вдоль
ударных цилиндрических штанг 7 до момента, когда корпус-ударник 5 упирается в головки 8. После этого начинается подъем штанг 7 с шаботом 10 (фиг.5, т.е. всего рабочего органа 3. Тяговым тросом 17 рабочий орган подводится к ловителю 20 (фиг. 7,8) и стабилизатор 14 положения входит в пространство между плоскостями 21. Учитывая, что углы наклона плоскостей 21 ловителя 20 и боковых граней 15 стабилизатора 14 совпадают, а также учитывая, что ось 25 стрелы 2, ось симметрии 13 шабота 10, по которой установлен стабилизатор 14, находятся в одной плоскости, то рабочий орган 3 получа ет требуемую ориентацию в пространстве, которая диктуется технологическими схемами уплотнения (фиг . 9 и 11) 1-го и 2-го циклов. Если перед началом подъема рабоч-его органа 3 имеется значительное отклонение от технологического створа, то дополнительно к плоскостям 21 функцию требуемой установки в створе выполняют еще и открылки 23 ловителя 20. Для облегчения установки рабочего органа 3 боковые грани 15 стабилизатора 14 сопряжены цилиндрической поверхностью 18. Благодаря тому.,. что трос 17 присоединяется посредством вертлюга 4 при повороте рабочего органа 3, когда он входит в ловитель 20, закручивание тягового троса 17 не происходит.
Как только рабочий орган 3 посредством стабилизатс1ра 14 упрется в . аммортизаторы 24, подъем его прекращается, и рабочий орган сбрасывают иа грунт.
При свободном падении корпус-ударник 5 находится в крайнем верхнем положении относительно шабота 10 ЛФиг.ЗК Когда же рабочий орган достигает поверхности грунта сначала ударно с ним взаимодействуют треугольные призмы 9, которые,внедряясь, производят уплотнение грунта на каждом своем элементарном участке и в связи с тем, что они -объединены в общий гибкий шабот 10 с возможностью совершать перемещение только вдоль оси штанги исключается их перекос при неровностях грунта и обеспечивается полный контакт днища рабочего органа с грунтовой поверхнрстью. Затем с. тругольньми призмами 9 взаимодействует корпусударник 5. Таким образом, после удара рабочего органа в пределах следа трамбования не происходит разрыхления верхнего слоя грунта.
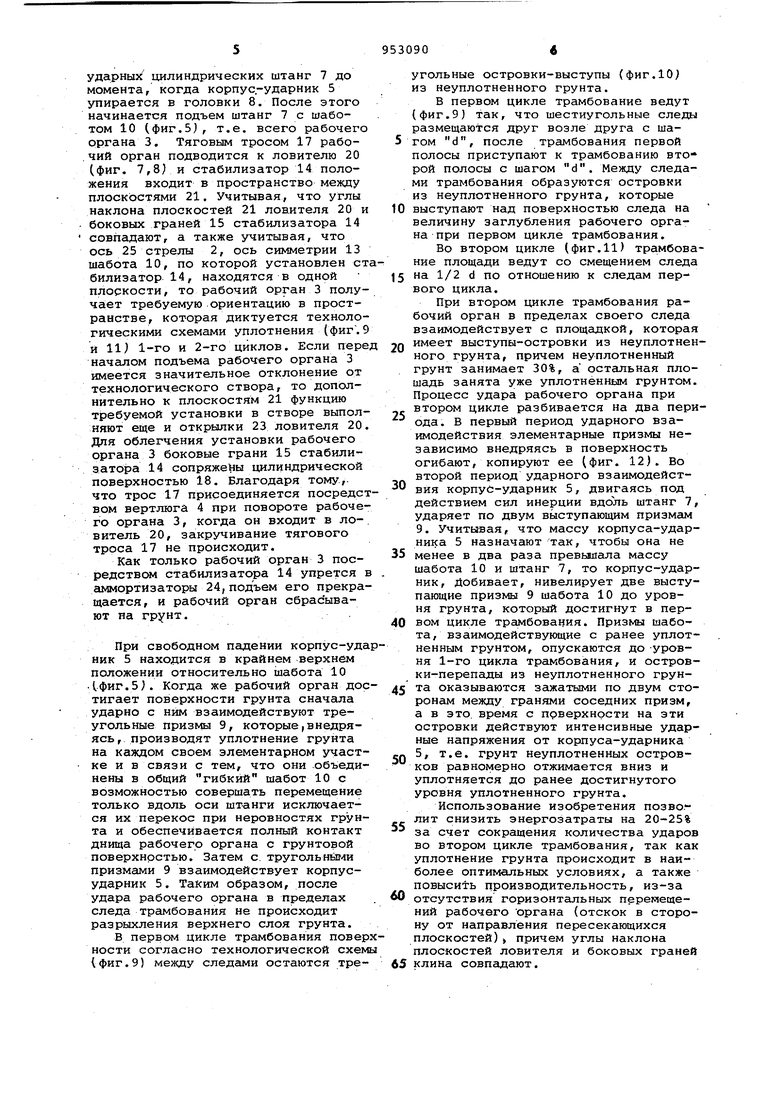
В первом цикле трамбования поверхности согласно технологической схемы (фиг.9) между следами остаются треугольные островки-выступы (фиг.10) из неуплотненного грунта.
В первом цикле трамбование ведут (фиг.9) так, что шестиугольные следы размещаются друг возле друга с шагом d, после трамбования первой полосы приступают к трамбованию второй полосы с шагом d. Между следами трамбования образуются островки из неуплотненного грунта, которые
0 выступают над поверхностью следа на величину заглубления рабочего органа при первом цикле трамбования.
Во втором цикле (фиг.11) трамбование площади ведут со смещением следа
5 на 1/2 d по отношению к следам первого цикла.
При втором цикле трамбования рабочий орган в пределах своего следа взаимодействует с площадкой, которая
Q имеет выступы-островки из неуплотненного грунта, причем неуплотненный грунт занимает 30%, а остальная плошадь занята уже уплотненным грунтом. Процесс удара рабочего органа при втором цикле разбивается на два периода. В первый период ударного взаимодействия элементарные призмы независимо внедряясь в поверхность огибают, копируют ее (фиг. 12). Во второй период ударного взаимодейст0 ВИЯ корпус-ударник 5, двигаясь под действием сил инерции вдоль штанг 7, ударяет по двум выступающим призмам 9. Учитывая, что массу корпуса-ударника 5 назначают так, чтобы она не
5 менее в два раза превышала массу
шабота 10 и штанг 7, то корпус-ударник. Добивает, нивелирует две выступающие призмы 9 шабота 10 до уровня грунта, который достигнут в первом цикле трамбования. Призкол шабота, взаимодействукяцие с ранее уплотненным грунтом, опускаются до -уровня 1-го цикла трамбования, и островки-перепады из неуплотненного грунта оказываются зажатыми по двум сторонам между гранями соседних призм, а в это. время с поверхности на эти островки действуют интенсивные ударные напряжения от корпуса-ударника
Q 5, т.е. грунт неуплотненных островков равномерно отжимается вниз и уплотняется до ранее достигнутого уровня уплотненного грунта.
Использование изобретения позво.лит снизить энергозатраты на 20-25% за счет сокращения количества ударов во втором цикле трамбования, так как уплотнение грунта происходит в наиболее оптимальных условиях, а также повысить производительность, из-за
О отсутствия горизонтальных перемещений рабочего органа (отскок в сторону от направления пересекающихся плоскостей), причем углы наклона плоскостей ловителя и боковых граней
5 клина совпадают.
Формула изобретения
олнена с наклонной выемкой, ширина оторой равна ширине грани, а глубина выемки расширяется к нижнему основанию призмы.
Источникиинформации, принятые во внимание при экспертизе
17 16
(pus. Ч
d
В
/Г-Н
12 q)ue. 5
//
5
х-7
1 feW/y//«//j ш тт
L I с I
WWfW
с
дзаг.Ш
,
( (pus. {2
fy //i$3/ if i f / i / r /
Ш
