(5) ЦИФРОВОЙ ЭКСТРЕМАЛЬНЫЙ МОДУЛЯЦИОННЫЙ МОСТ ПЕРЕМЕННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой экстремальный мост переменногоТОКА C пОдЕКАдНО-СлЕдящиМ уРАВНОВЕшиВА-НиЕМ | 1979 |
|
SU836596A1 |
| Цифровой экстремальный мост переменного тока со следящим уравновешиванием | 1984 |
|
SU1213424A1 |
| Цифровой экстремальный мост переменного тока | 1987 |
|
SU1479882A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Цифровой автоматический экстремальный мост переменного тока | 1983 |
|
SU1087903A1 |
| Цифровой автоматический экстремальный мост переменного тока | 1976 |
|
SU618689A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока | 1978 |
|
SU748256A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока | 1981 |
|
SU970238A1 |
| Автоматический мост переменного тока | 1984 |
|
SU1213423A1 |
| Автоматический цифровой мост переменного тока | 1983 |
|
SU1190269A1 |
1
Изобретение относится к электроизмерительной технике и может быть использовано для измерения парахет- . ров комплексных сопротивлений.
Известны цифровые экстремальные модуляционные мосты переменного тока, в которых уравновешивание мостовой цепи по каждому из параметров осуществляется поочередно. В таких мостах время одного такта уравновещивания состоит из времени, в течение которого осуществляется модуляционное воздействие по одному из параметров, и времени, в течение которого производится регулирующее воздейст- ,5 вие по этому же параметру и оканчиваются переходные процессы в мостовой измерительной цепи и детекторе равновесия Cl.
Недостаток известных мостов за- 20 ключается в низком быстродействии, так как необходимо значительное время на окончание переходных процессов после регулирующих воздействий.
Наиболее близким техническим решением является цифровой экстремальный модуляционный мост переменного тока, содержащий последовательно включенные генератор рабочей частоты, мостовую измерительную цепь и детектор равновесия, основнойи вспомогательный реверсивные счетчики, потенциальные выходы которых соединены с мостовой измерительной цепью, тактовый генератор, выход которого соединен с входами синхронизации детектора равновесия и формирователя сигналов управления модуляторами, а также два модулятора, входы которых подключены к генератору рабочей частоты, а выходы - к мостовой измерительной цепи 2.
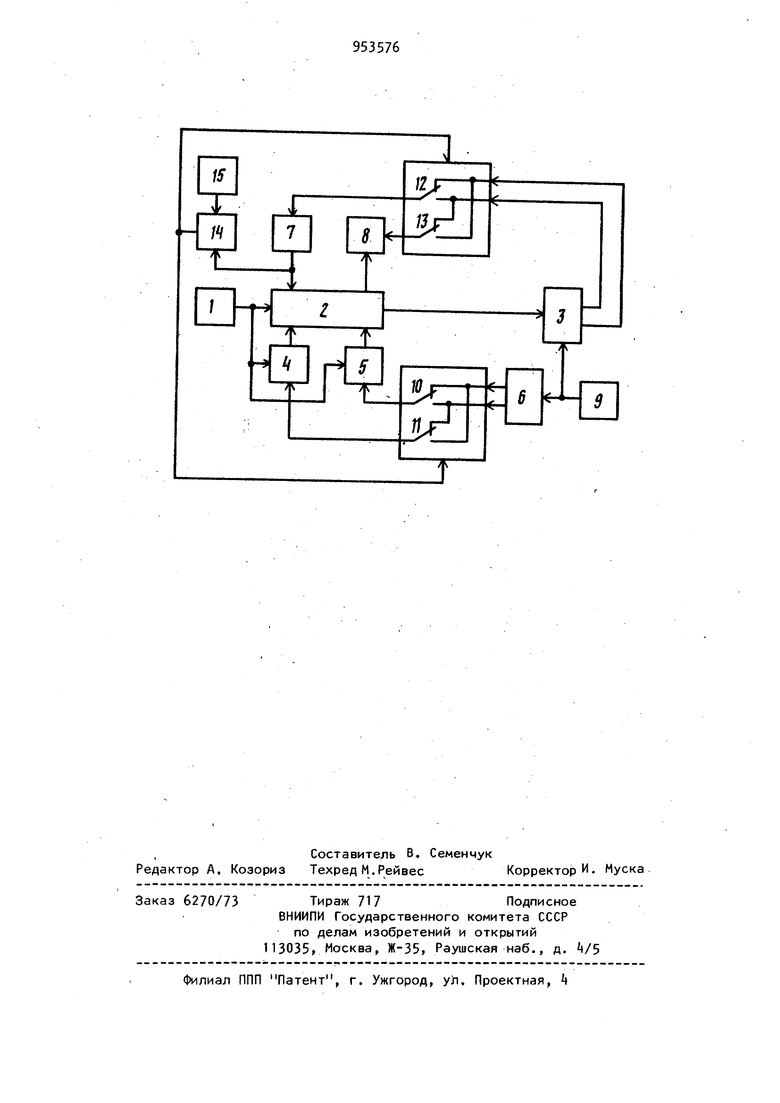
В данном устройстве по сравнению с известным время, в течение которого производятся регулирующие воздействия и заканчиваются переходные процессы в процессе измерения в общем случае в два раза меньше. При переменной чувствительности мостовой измерителной цепи амплитудные приращенмя ее выходного сигнала, вызванные модуляционными воздействия ми по основному и вспомогательному параметрам, в диапазоне измерения не постоянны и могут отличаться друг от друга в несколько раз (по десяти). Причем указанные приращения находятся в квадратуре. Приращение амплитуды выходного сигнала в 20 раз меньше порога чувст вительности детектора равновесия. При этом в 20 раз уменьшается точность измерения и во столько же раз уменьшается быстродействие прибора. Недостатками известного устройства является малое быстродействие и низкая точность измерения.. Цель устройства - повышение быстродействия и точности измерения цифрового экстремального модуляционного моста переменного тока. Указанная цель достигается тем, что цифровой экстремальный модуляцио ный мост переменного тока, содержащий последовательно включенные генератор рабочей частоты, мостовую измерительную цепь и детектор равновесия, основной и вспомогательный реверсивные счетчики, потенциальные вы ходы которых соединены с мостовой измерительной цепью, тактовый генератор, выход которого соединен с вхо дами синхронизации детектора равновесия и формирователя сигналов управления модуляторами, а .также два модулятора, входы которых подключены к генератору рабочей частоты, а выходы - к мостовой измерительной цепи, снабжен задатчиком кода и блоком сравнения кодов, входы которого подключены к потенциальным выходам основного реверсивного счетчика и зада чика кодов, четырьмя переключателями два из которых включены между соответствующими управляЪщими входами модуляторов и выходами формирователя сигналов управления модуляторами, два других переключателя включены .между соответствующими входами ревер сивных счетчиков и управляющими выходами детектора равновесия, а входы управления переключателей подключены к выходу блока сравнения кодов. На чертеже представлена блок-схема предлагаемого цифрового экстремального модуляционного моста переменного тока. Цифровой экстремальный модуляционный мост переменного тока содержит генератор 1 рабочей частоты, .мостовую измерительную цепь 2, детектор 3 равновесия, модуляторы основного k параметра и вспомогательного 5, формирователь 6 сигналов управления модуляторами, реверсивные счетчики основного 7 параметра и вспомогательного 8, тактовый генератор 9, осуществляющий синхронизацию работы детектора 3 равновесия и формирователя 6, переключатели 10-13, блок сравнения кодов и задатчик 15 кодов. Конструктивно формирователь сигналов управления модуляторами может, быть выполнен на основе заторможенных мультивибраторов либо на -основе запоминающих- элементов, например триггеров. 1 Выходные сигналы формиоователя 6 воздействуют на модуляторы и 5. Последние формируют модуляционные воздействия (сигналы рабочей частоты требуемой амплитуды выходного напряжения (тока) мостовой измерительной цепи 2. По знаку приращений амплитуды выходного сигнала измерительной цепи детектор 3 равновесия формирует сигналы управления, которые поступают на входы реверсивных счетчиков 7 и 8. Порядок осуществления модуляционных воздействий в каждом из тактов уравновешивания следующий. Сначала осуществляется модуляционное воздействие по одному из параметров. Детектор равновесия 3 анализирует реакцию мостовой измерительной цепи 2 на это воздействие. Результат анализа запоминается детектором 3 равновесия. Затем включается модуляционное воздействие и формируется сигнал управления по другому параметру. Оба сигнала управления поступают на входы реверсивных счетчиков 7 и 8 одновременно. С изменением состояний счетчиков изменяются величины регулируемых элементов мостовой измерительной цепи 2, Недостатки известного устройства устраняются благодаря тому, что всегда первым осуществляется модуляционное воздействие по тому параметру, по которому чувствительность измерительной цепи меньше. Информацией о чувствительностях измерительной цепи является наличие или отсутствие разрешающего сигнала на выходе блока сравнения кодов }k. Последний зависит от состояния счетчика основного параметра 7 и задатчика 15 кодов. Если код счетчика 7 превысит код задатчика 15 кодов, на выходе блока 14 сравнения кодов . появляется разрешающий сигнал, свидетельствующий о том, что чувствительность измеритель ной цепи 2 по вспомогательному параметру меньше чувствительности по основному параметру. При этом срабатывают переключатели 10 и 11. В резуль тате первым во времени осуществляется модуляционное воздействие по вспо могательному параметру. Если на выходе блока 14 сравнения кодов отсутствует разрешающий си1- нал (свидетельство того, что чувствительность измерительной цепи по вспомогательному параметру вышечувст вительности по основному), то первым осуществляется модуляционное воздействие по основному параметру, так как переключатели 10 и 11 находятся в несработанном (исходном) состоянии Одновременно пои помощи переключателей 12 и 13 подключения входов реверсивных счетчиков 7 и 8 к выходам детектора 3 равновесия взаимно меняются местами. Наложение выходного модуляционног сигнала большей амплитуды на модуляционный сигнал меньшей амплитуды (эти сигналы находятся в квадратуре) практически не влияет на величины приращений, вызываемых модуляционными воздействиями. Так, например, при чувствительности (в условных единицах) измерительной мостовой цепи по основному и вспомогательному парамет рам, равной 1 и 0,1 соответственно, вызванное модуляционным воздействием по вспомогательному параметру, прира щение выходного сигнала моста равно 0,1. Это превышает в 20 раз приращение по тому же параметру в известном мосте при таких же чувствительностях Если порог чувствительности детектора рановесия примем равным 0,1 (такой случай типичен для целого ряда цифровых экстремальных мостов), то точность и быстродействие предлагаемого моста увеличивается по отношению к известному в 20 раз. Предлагаемое техническое решение экспериментально проверено и будет использовано в подготавливаемом к серийному выпуску мосте переменного тока Р5079. Формула изобретения Цифровой экстремальный модуляционный мост переменного тока, содержащий последовательно включенные генератор рабочей частоты, мостовую измерительную цепь и детектор равновесия, основной и вспомогательный реверсивные счетчики, потенциальные выходы которых соединены с мостовой измерительной цепью, тактовый генератор, выход которого соединен с входами синхрони зации детектора равновесия и формирователя сигналов управления модулятс рами, а также два модулятора,входы которых подключены к генератору рабочей частоты, а выходы - к мостовой измерительной цепи, отличающийся тем, что, с целью повышения быстродействия и точности измерения, он снабжен задатчиком кода и блоком сравнения кодов, входы которого подключены к потенциальным выходам основного реверсивного счетчика и задатчика кодов, четырьмя переключателями, два из которых включены между соответствующими управляющими входами модуляторов и выходами формирователя сигналов управления модуляторами, два других переключателя включены между соответствующими входами реверсивных счетчиков и управляющими выходами детектора равновесия, а входы управления переключателей подключены к выходу блока сравнения кодов. Источники информации, принятые во внимание при экспертизе 1.Приборы и системы управления. 3, 1971, с. 30-32. 2.Мост переменного тока автоматический с цифровым отсчетом Р5016. Техническое описание и инструкция по эксплуатации, п. 4.1.2.
