Изобретение относится к электроизмерительной технике и предназначено для применения в цифровых мостах переменного тока, измеряю- щих комплексные сопротивления и проводимости .
Известен цифровой автоматический экстремальный мост с пробными, или модуляционны1 1и воздействиями для определения параметров комплексных сопротивлений и проводимостей в широксм диапазоне частот и. номиналов. Уравновешивание такого прибора производят с использованием импульсных регулирующих воздействий, формируемых путем осуществления небольших пробных скачкообразных изменений уравновешивающего параметра или модуляционных Шагов « последующего выделения приращения амплитуды выходного напряжения мостовой измерительной цепи, возникающего или от упомянутых пробных изменений, или от модуляци-. онных шагов. При этс рабочие шаги. в сторону равновесия np i6bpa.npOH3Soдят по наличию отрицательных приращений амплитуды выходного напряжения цепи, а определение частных минимумов на каждой декаде цифрового моста также как и изменение направлекия регулировки уравновешивающего параметра, осуществляют по отсутствию этих отрицательных приращений. При этом для достижения максимальной точности уравновешивания пробные или модуляционные шаги выбирают равными рабочим шагам уравновешивающего параметра 1.
Недостатком известного способа уравноваийвания .является то, что при его использовании не обеспечивается достаточная помехоустойчивость моста в зоне равновесия.
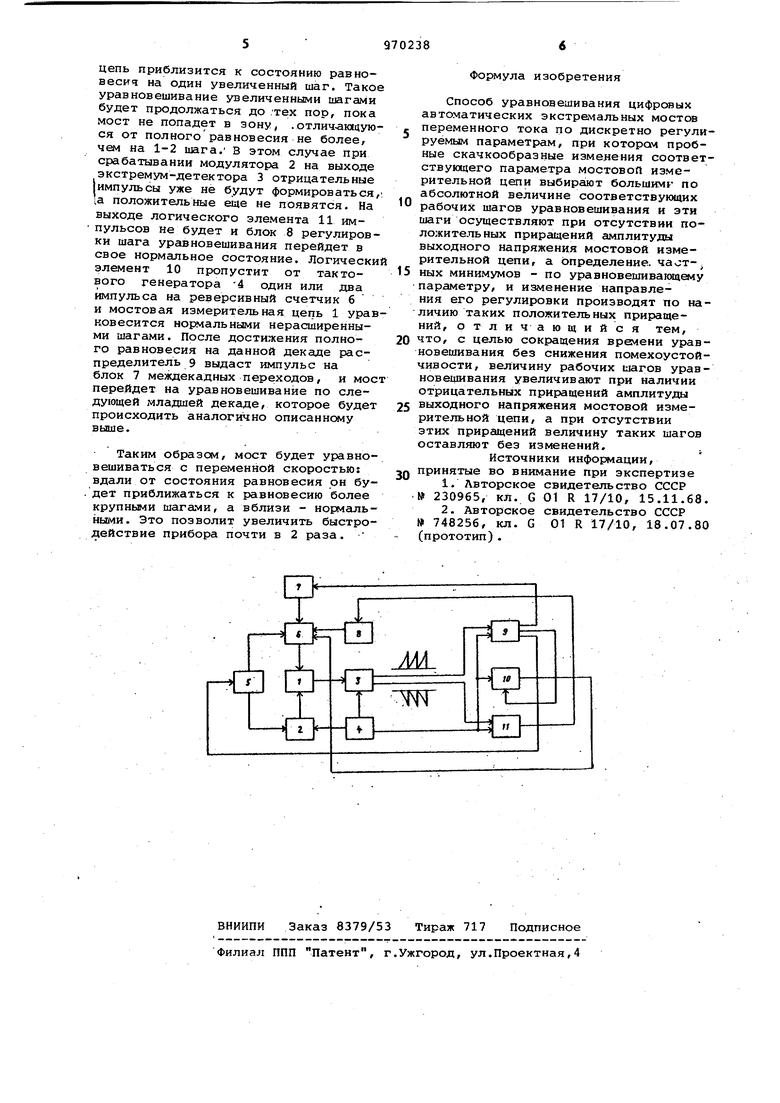
Известен способ уравновешивания цифровых автоматических- мостов, ис- пользование которого повышает п смехоустойчивость. приборов в зоне равновесия. Согласно этому способу дискретные рабочие шаги уравновешивающего параметра производят при отсутствии положительных модуляционных приращений амплитуды выходного напряжения мостовой измерительной цепи, а определение частных минимумов и изменение направления регулировки уравновешивающего параметра осуществляют по наличию положительных модуляционных приращений этой амплитуды. При этом модуляционные шаги выбирают в 2 раза большими по абсолютной вели4H je соответствующих рабочих шагов уравноввшиванияГ2. Недостатком известного способа является то, что его использование не приводит к повышению быстродействия прибора. , Цель изобретения - сокращение времени уравновешивания без снижения помехоустойчивости. Цель достигается тем, что.в спосю бе уравновешивания цифровых автоматических экстремальных мостов переменного тока по дискретно регулируемым параметрам, -при котором пробные скачкообразные изменения соответству щего параметра мостовой измерительной цепи выбирают большими по абсолютной величине соответствующих рабочих шагов уравновешивания и эти шаги осуществляют при отсутствии пол жительных приращений амплитуды выход ного напряжениямостовой измерительной цепи, а определение частных минимумов - по уравновешиваювдему .параметру и изменение направления его ре гулировки производят по наличию положительных приращений этой амплитуды, величину рабочих шагов уравновеш вания увеличивают при отрица тельных приращений амплитуды выходно го напряжения мостовой измерительной цепи, а при отсутствии этих приращеНИИ величину таких шагов оставляют без изменений. На чертеже приведена упрощенная схема цифрового модуляционного моста уравновешиваемого только па одному параметру. . Мост содержит мостовую измеритель ную цепь 1, модулятор 2, экстремумдетектор 3, тактовый генерг1Тор 4, триггер реверса 5, реверсивный счет чик 6, блок 7 мезкдекадных переходов блок 8 регулировки величины рабочего шага уравновешивания, распределитель 9 импульсов, логические элементы 10 и 11. Модулятор 2 производит небольшие пробные скачкообразные измерения уравновешивающего параметра мостовой измерительной цепи 1. Напргшление ег модуляционных шагов определяется состоянием триггера реверса 5. Экст ремум-детектор 3 имеет два выхода и формирует импульсы как по положител ным, так и по отрицательным прираще ниям амплитуды выходного напряжения мостовой измерительной цепи 1. Импульсы, соответствующие положительным приращениям, подаются на ,раопре делитель 9, а импульсы, соответствую щие отрицательным приращениям, на ло гический элемент 11. Ритм работы все му мосту задает тактовый гбшератор он же управляет распределителем 9, и логическими элементами 10 и 11. Распределитель 9 импульсов формирует импульсы только тогда, когда с экстремум-детектора 3 на его вход поступают импульсы, соответствующие положительным приращениям амплитуды выходного напряжения мостовой измерительной цепи 1. Она имеет три выхода. Первый выход распределителя 9 управляет блоком 7 междекадных переходов, второй - логическим элементом 10, а третий - триггером реверса 5. С распределителя 9 на логический элемент 10 при положи-f тельных приращениях амплитуды выходного напряжения цепи 1 поступают запрещающие импульсы и логический элемент 10 блокирует передачу импульсов с тактового генератора 4 на реверсивный счетчик 6. Логический элемент 11 формирует импульсы только тогда, когда на его вход с экстремум-детектора 3. поступают импульсы, соответствующие отрицательным приращениям амплитуды выходного напряжения мостовой измерительной цепи 1. При наличии такого импульса на входе логический элемент 11 выдает импульс на блок В регулировки рабочего шага, который путем воздействия на реверсивный счетчик увеличивает шаг уравновешивания. Уравновешивание моста происходит следующим образом. Пусть мостовая измерительная цепь 1 находится далеко от равновесия, а состояние триггера реверса 5 соответствует регулировке уравновешивающего параметра в сторону противоположную равновесию. В этом случае модуляционный шаг, формируемый модулятором 2, вызовет положительное приращение амплитуды выходного напряжения мостовой измерительной цепи 1. Экстремум-детектор 3 сформирует импульс, который поступит на распределитель 9, который в свою очередь выдаст импульс на триггер реверса 5. Он перейдет в другое состояние и изменит направление регулировки уравновешиванхцего параметра и модуляционных шагов на противоположное. Следующее модуляционное воздействие модулятора 2 вызовет уже отрицательное приращение амплитуды выходного напряжения мостовой измерительной цепи 1. Следовательно, экстремум-детектор 3 сформирует импульс, который поступит только на логический элемент 11, а на входе и выходе распределителя 9 импульсы будут отсутствовать. При этом логический элемент 11 выдаст импульс на блок 8 регулировки, который перейдет в состояние, соответствующее увеличеннсму шагу уравновешивания. Так как на логический элемент 1, с распределителя 9 в этом случае не поступал сигнал запрещения, то с тактового генератора 4 через логический элемент10 пройдет т/тупъс, который вызовет срабатывание реверсивного счетчика б, и мостовая измерительная.
в1ск/н состоянию равновесич на один увеличенный шаг. Такое уравновешивание увеличенны:;
мо2Гн2 по° ° «° °Р «х ся L « « зону, .отличаюцуюч1, L f° равновесия не болееГ 2 3 этом случае при срабатывании модулятора 2 на выходе
lHMnvSfo ° отрицательнее (импульсы уже не будут формироваться ia положительные еще не появятся 5а выходе логического элемента 11 им «.- Ser-fJ --°r o-;-bf«вого генератора -4 один или даа импульса на реверсивный счетчик 6 и мостовая измерительная цепь 1 уравновесится нормальными нерасширенными шагами. После достижения полного равновесия на данной декаде распределитель 9 выдаст импульс на блок 7 междекадных переходов, и мост перейдет на уравновешивание по следующей младшей декаде, которое будет происходить аналогично описанноиу выше.
Таким образам, мост будет уравновешиваться с переменной скоростью: вдали от состояния равновесия он будет приближаться к равновесию более крупными шагами, а вблизи - нормальными. Это позволит увеличить быстродействие прибора почти в 2 раза.
Формула изобретения
Способ уравновешивания цифровых автоматических экстремальных мостов 5 переменного тока по дискретно регулируемым параметрам, при котором пробные скачкообразные изменения соответствующего параметра мостовой измерительной цепи выбирают большими по абсолютной величине соответствующих рабочих шагов уравновешивания и эти шаги осуществляют при отсутствии положительных приращений амплитуды выходного напряжения мостовой измерительной цепи, а определение, чаотЬ ных минимумов - по уравновешивающему параметру, и изменение направления его регулировки производят по наличию таких положительных приращеНИИ, отличающийся тем, 0 что, с целью сокращения времени уравновешивания без снижения помехоустойчивости, величину рабочих шагов уравновешивания увеличивают при наличии отрицательных приращений амплитуды 5 выходного напряжения мостовой измерительной цепи, а при отсутствии этих приращений величину таких шагов оставляют без изменений.
Источники информации,
0 принятые во внимание при экспертизе
1.Лвторское свидетельство СССР
230965, кл. G 01 R 17/10, 15.11.68.
2.Авторское свидетельство СССР
№ 748256, кл. G 01 R 17/10, 18.07 80 (прототип).