«я
00
00 О1 Изобретение относится к автоматическому регулированию и управлению и предназначен для аналогового управ ления гидравлическими исполнительными механизмами электрогидравлических приводов, применяющихся во многих областях техники (роботостроение, авиация, машиностроение, космос и т.д.), Цель изобретения - упрощение конструкции. На чертеже представлена принципиальная схема предлагаемого ЭГУ. Усилитель содержит электромеханический преобразователь (ЭМП) 1, соетоящий из магнитопровода 2 с насажей HbiMH на него катушками 3, соединенными по дифференциальной схеме, якоря 4, укрепленного в пружинных подвесах 5 и/поворачивающегося относительно оси 6 при подаче на катуюки управляющего сигнала, С якорем 4 жестко связана заслонка 7, образующая совместно с Т-образными парами сопла 8 и двумя постоянными дросселямй 9 первый каскад усиления, собранньй по схеме пщравпкческкй мост Второй каскад усиления выполнен на плоском поворотном дросселирующем золотнике 10. Управление шариками являюв1имися порпшями и перемещающимися-В цилиндрах 12,соединенных с плечами гидравлического моста каналами 13, Таким образом, золотник 10 является нагрузкой гвдравлического моста. В золотнике 10 выполнены пазы 14 и 15, кромки которых при повороте золотН1Ша по отношению отверстий 1 6 и 17 в корпусе образуют дросселирующие щели. На чертеже отверстия 16 и 17 условно совмещены с главным разрезом и показаны линией видимого . .Койтура. Верхние пазы 14 соединены с каналом питания посредством отверстий 18, нижние пазы 15 с каналом слй ва отверстиями 19. Кроме того, в кор пусе имеется отверстие 20 для слива уТечек из управляющих цилиндров 12 и золотника 10. Канал 21 - канал питания. На боковой поверхности золотника 10 имеется лыска 22, При подаче на вход ЭГУ управляющего сигнала золотник 10, поворачиваясь, лыской 22 взаимодействует с обратной стороной сопел, уменьшая управляющий перепад на соплах до момента его полного устранения, что соответствует остановке золотника Ю, т..е. осуп5ествляется отрицательная обратная связь по положению золотника 10 по отношению положения заслонки 7. На чертеже показана прямая лыска 22, что дает линейную характеристику обратной связи. Расстояние между лыской и нижними торцами Т-образных сопел для обеспечения максимальной чувствительности гидравлического моста должно составлять 0,08-0,11 от диаметра.Сопел. Изменяя Лорму лыски 22 можно получать нелинейную, оптимальную ..для данного привода, характеристику обратной связи. Например, при желании иметь коэффициент усиления цепи обратной связи в нейтральном положении выше, чем на концах хода золотника, необходима форма лыски в виде перевернутой параболы (в плане). Естественно, что оптимизация формы лыски должна вестись на этапе проектирования ЭГУ. Устройство работает следующим образ.ом. На вход ЭМП 1 поступает аналоговый управляющий сигнал, он преобразуетсяна ЭМП в поворот яко.ря 4 с заслонкой « 7 относительно оси 6, что ведет к прикрБ1Тию одного и открытию другого сопел 8. Вследствие такого изменения расстояния между соплами 8 и заслойкой 7, а также того, что сопла 8 и постоянные.дросселя 9 собраны в гндра1злический мост возникает управляющий перепад давлений, который подается в управляющие цилиндры ,12. Рас-, положенные в этих цилиндрах шарики 11. перемещаются и поворачивают золотник 10, открьгоая отверстия 16 и 17 соответственно на нагнетание и на слив. Одновременно с поворотом золот- , ника лыска 22 прикрьшает другую сторону открытой заслонки Т-образного сопла 8 и открывает другую сторону второго сопла 8, уменьшая управляющий перепад. Таким образом, вращение золотника происходит до момента исчезновения управляющего перепада.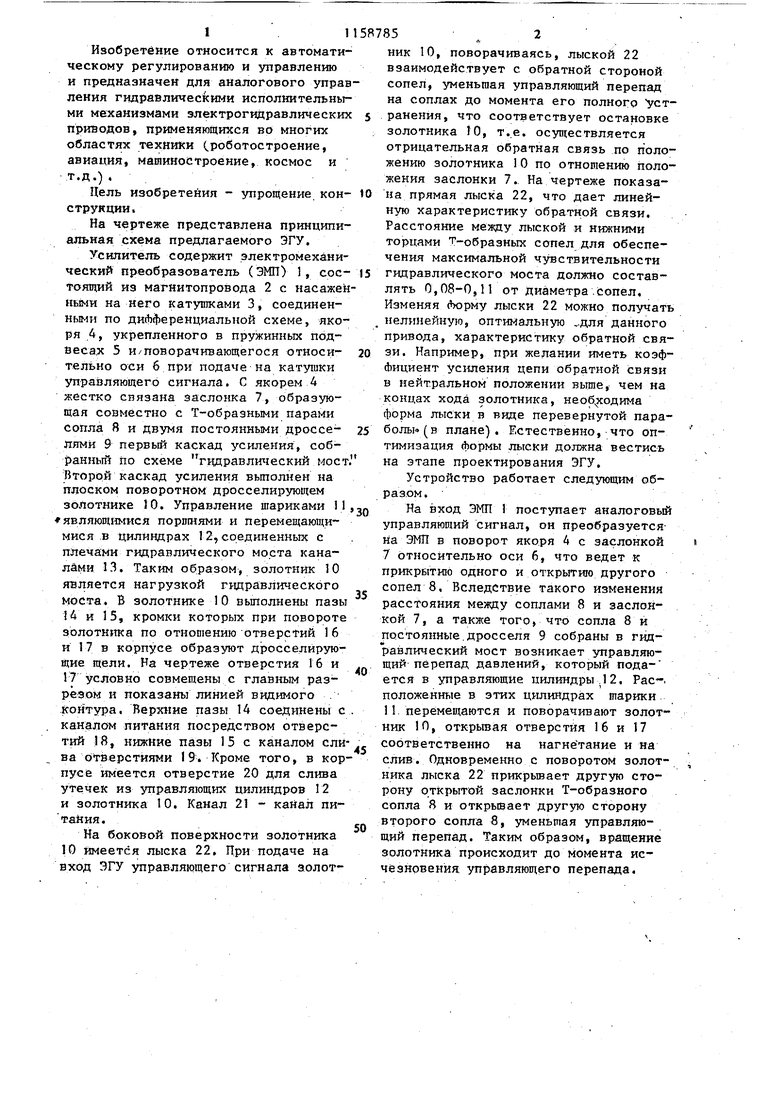
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ГИДРОУСИЛИТЕЛЯ | 2010 |
|
RU2446320C2 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2007 |
|
RU2361119C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГИДРОУСИЛИТЕЛЯ | 2005 |
|
RU2293889C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2015 |
|
RU2599098C1 |
| Электрогидравлический усилитель | 1987 |
|
SU1413304A1 |
| ГИДРОУСИЛИТЕЛЬ | 2003 |
|
RU2244171C1 |
| Электрогидравлический усилитель | 1990 |
|
SU1756655A1 |
| ГИДРОУСИЛИТЕЛЬ | 2007 |
|
RU2347115C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГИДРОУСИЛИТЕЛЯ | 2007 |
|
RU2347114C1 |
ЭЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ, содержащий первый KiacKaa усиления cocтo пц rй нэ электромеханического преобразователя с заслонкой и парь сопел с постоянными дросселями, соединенными по схеме гидравлического моста, и второй каскад усиления, вьшолненный в виде плоского поворотного дросселирующего золотника, соединенного с каналами питания и слива и гидравлическим мостом, а также узел отрицательной обратной связи по положению плоского поворотного золотника, о ТЛИ ч а ю щ и и с я тем, что, с целью упрощения конструкции, узел отрицательной обратной связи по положению плоского поворотного золотника вьтолнен в виде лыски на боковой поверхности плоского поворотного золотника, яйляющейся заслонкой пары соПел, вьшолиенных Т-образными, (Л
| Башта т.н., Руднев С.С | |||
| и др, Гадравлика, гииромапшны и гидропривоДы | |||
| М.: Машиностроение, 1982, с | |||
| Аппарат для передачи изображений неподвижных и движущихся предметов | 1923 |
|
SU405A1 |
| Двухкаскадный электрогидравлический усилитель | 1977 |
|
SU618580A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
