Фиг.З
Изобретение относится к измерительной технике и может быть использовано для центрирования растровых шкал в приборах для измерения угловых перемещений.
Известно техническое решение, которое обеспечивает измерение относительного углового положения двух независимо вращающихся осей с помощью закрепленных на них растров.
Недостатком этого технического решения является то, что его точность и работоспособность может быть обеспечена лишь при высокой степени соосности вращающихся растров, что с учетом реально существующих технологий при изготовлении подобных устройств практически не может быть достигнуто с использованием чисто механических средств. Наличие даже незначительного эксцентриситета может привести к сбоям выдаваемой этим устройством информации, т.е. к потере его работоспособности.
Известен способ центрирования круговых растров, один из которых измеритель- ный, а другой индикаторный, заключающийся в том, что пропускают через эти растры световой поток, обеспечивают возвратно поступательное угловое сканирование индикаторного растра, формируют два измерительных сигнала, соответствующих участкам растров, расположенных под углом 90°, формируют опорный сигнал, получаемый пропусканием светового потока через всю площадь сопрягаемых растров и являющийся результатом взаимодействия всех элементов растров, затем в моменты, соответствующие пикам сигналов, формируют импульсы, сравнивают фазы измерительных импульсов с фазой импульсов суммарного опорного сигнала, которые пропорциональны величине и знаку составляющих эксцентриситета, перемещают измерительный растр относительно индикаторного по двум перпендикулярным одна другой осям до момента совпадения фаз измерительных импульсов с импульсами суммарного сигнала.
Недостатком известного способа является ограниченная сточность взаимного центрирования круговых растров. Это связано с тем, что известному способу присущи две методич еские погрешности, которые прямым образом входят в погрешность взаимного центрирования растров. Первая из них определяется отклонением угла сканирования индикаторного растра от своего ноWминального значения, равного у -j-r , где
W - угловой шаг растра. Вторая погрешность связана с наличием эксцентриситета
измерительного растра относительно оси вращения, величина которогр может целиком входить в погрешность центрирования растров. Другим недостатком известного
способа является то, что он не обеспечивает возможности центрирования одновременно двух вращающихся растров.
Цель изобретения - повышение точности центрирования Двух независимо враща0 ющихся растров за счет исключения методических погрешностей центрирования, присущих известному способу.
Поставленная цель достигается тем, что согласно способу центрирования круговых
5 растров, заключающемуся в том, что направляют на растровое сопряжение пучки лучей,регистрируют посредством первого и вторЬгО фотоприемников интенсивность пучков лучей, прошедших через растровое.
0 сопряжение в первой и второй зонах, расположенных так, что прямые, соединяющие каждую из этих зон с центром растрового сопряжения, взаимно перпендикулярны, смещают растры в двух взаимно герпенди5 кулярных направлениях до совмещения фаз сигналов с первого и второго фотоприемников, приводят оба растра во вращение, обеспечивая их относительное угловое перемещение с постоянной скоростью, допол0 нительно регистрируют посредством третьегб и четвертого фотоприемников интенсивность пучков лучей, прошедших через растровое сопряжение в третьей и четвертой зонах, каждая из которых распо5 ложена диаметрально противоположно соответственно первой и второй зонам растрового сопряжения, по величине и знаку фазового сдвига между сигналами с выходов первого - третьего и второго-четверто0 го фотоприемников определяют величину и направление эксцентриситета, производят относительное перемещение вращающихся растров по двум взаимно перпендикулярным направлениям, совпадающих с направ5 лениями расположения первого и третьего, второго и четвертого фотоприемников, до совмещения фаз сигналов в каждой из этих пар фотоприемников.
Предлагаемый способ отличается от из0 вестного тем, что в нем приводят оба растра во вращение, обеспечивая их относительное угловое перемещение с постоянной скоростью, дополнительно регистрируют посредством третьего и четвертого фото5 приемников интенсивность пучков лучей, прошедших через растровое сопряжение в третьей и четвертой зонах, каждая из которых расположена диаметрально противоположно соответственно первой и второй зонам растрового сопряжения, по величине
и знаку фазового сдвига между сигналами с выходов первого-третьего и второго-чет- вертого фотоприемников определяют величину и направление эксцентриситета, производят относительное перемещение вращающихся растров по двум взаимно перпендикулярным направлениям, совпадающих с направлениями расположения первого и третьего, второго и четвертого фотоприемников до совмещения фаз сигна- лов в каждой из этих пар фотоприемников.
На фиг. 1 изображены два круговых растра, расположенных один относительно другого с эксцентриситетом, и системы считывания измерительных сигналов; на фиг. 2 - векторные диаграммы пространственных фаз измерительных сигналов в считывающих системах в зависимости от направления вектора эксцентриситета растров; на фиг. 3 - одна из возможных конструктивных схем для обеспечения центрирования двух вращающихся растров: на фиг. 4 - векторная диаграмма суммарных (постоянного ё и переменного е) эксцентриситетов двух независимо вращающихся растров.
Предлагаемый способ осуществляют следующим образом.
Два идентичных круговых растра Pi и Ра первоначально сопряжены между собой с некоторым эксцентриситетом вращаю- щихся осей (фиг. 1), величина и направление которого определяется отрезком (O-Oi).
При вращении растров PI и Ра на своих осях с относительной угловой скоростью Q происходит модуляция светового потока с частотой
(а QNi , где N - число штрихов на каждом растре.
Если расположить за растровым сопряжением фотоприемник в некоторой коорди- нате ((х.у), то на его выходе формируется периодический сигнал вида . U Unrslnfon + Я),(1)
где $ - пространственная фаза выходного сигнала, обусловленная эксцентриситетом (несоосностью) вращающихся растров.
Пространственная фаза $ в функции эксцентриситета е, находится из соотношения
ё
3 2Я- 51П04,(2)
где W - линейная величина шага штрихов в координате расположения фотоприемника; а - угол между направлением вектора эксцентриситета и радиуса вектора, на ко- тором расположен фотоприемник.
Из соотношения (2) видно, что фазовый сдвиг Q становится равным нулю при значениях о} , равных 0 и 180°. В то же время
фазовый сдвиг 0 принимает максимальные значения, когда а становится равным 90 или 270°. Это значит, что. если направление эксцентриситета перпендикулярно линии, на которой располагаются считывающие фотоприемники, сигналы с фотоприемников, расположенных на этой линии, сдвигаются по фазе на максимальную величину
$ , равную 1 ytrrr , но с противоположными
знаками. Когда направление эксцентриситета совпадает с линией, на которой расположены считывающие фотоприемники, фазовый сдвиг 0 в таких сигналах отсутствует.
Располагая две пары диаметрально противоположных фотоприемников 1-3 и 2- 4 на осях у и х перпендикулярно одна другой, не трудно видеть, что фазовые сдвиги сигналов, формируемые фотоприемниками в каждой паре, пропорциональны соответственно проекциям и вектора эксцентриситета ё на соответствующие оси х и у.
На фиг, 2 показаны четыре возможных случая, когда направления вектора эксцентриситета ё сопрягаемых растров расположены соответственно в I, II, lit и IV квадрантах.
Величины и знаки фазового сдвига с фотоприемников 1-3, 2-4 для случаев расположения вектора эксцентриситета ё в квадрантах I, II, III и IV находятся из соотношений:
01 2 sin ш ± 2 ж-2-jjдля а 90 и 270° соответственно в I, IV и II,
IIIквадрантах;
ft 81паз а - 270 и 90° соответственно в I, IV и И, ИГ квадрантах;
$ 2я-|Ј- sin 02 ± 2 л |j
для а - 90 и 270° соответственно в I. И и III,
IVквадрантах;
я-|Ј- sin 04 ± 2 я Ik
для а 90 и 270°соответственно в I, II и III, IV квадрантах.
Подставляя полученные значения фазовых сдвигов & и $ и их знаки в соотношение (1), получим выражения для измерительных сигналов с фотоприемников 1,3 и 2,4 при расположении вектора эксцентриситета е соответственно в квадрантах I, II, III и IV:
Ul UmSln(ft)ti 0l)
соответственно в I, IV и II, III квадрантах;
U3 UmSln(urt± ft)
соответственно в I, IV и II, III квадрантах;
Ua Um sln( йЛ + YЈ) соответственно в I, II и III, IV квадрантах;
U4 Um sln(yt + М соответственно в I, II и III, IV квадрантах.
Из полученных соотношений видно, что разность фаз между диаметрально противоположными сигналами Ui и Уз, Ua и LM при воздействии на каждую из этих пар составляющих эксцентриситета и еу равна соответственно 2б и 2t/i ,что вдвое больше, чем по известному способу при тех же значениях воздействующих составляющих эксцентриситета, в связи с чем фазовая чувствительность предлагаемого способа к воздействию эксцентриситета вдвое выше. Используя при измерении сдвига один и тот же сигнал в каждой паре в качестве опорного, например сигналы Ui и Ш, не трудно видеть, что другие два сигнала Кз и Ua в каждой паре в зависимости от направлений проекций векторов ех и еу или отстают, или опереж ают опорные сигналы (пунктирные векторы сигналов Уз и 1М на фиг. 2).
Таким образом, знак фазы одного (измерительного) сигнала относительно другого (опорного) указывает на направление проекции вектора эксцентриситета вдоль осей х и у, а величина фазового сдвига характеризует величину этой проекции.
Процесс центрирования растров заключается в том, что после определения направления векторов эксцентриситета и по знаку соответствующих фазовых сдвигов в каждой паре измерительных сигналов производят перемещение одного вращающегося растра относительно другого вдоль линий 2-4 и 1 -3 (встречно по отношению к направлениям и ёу) до момента совпадения фаз сигналов Уз и Ui, U2 и 1М. Для того, чтобы убедиться, что эксцентриситет сопрягаемых растров сведен к нулю, необходимо измерить также фазовый сдвиг между двумя любыми измерительными сигналами, принадлежащими разным парам, например между Ui или U2 или Уз. Уз или U4, Уч или Ui, и убедиться в том, что фазы этих сигналов также совмещены,
Необходимость такого дополнительного измерения связана с устранением неопределенности, при которой возможна ошибка в центрировании. Например, если одна из составляющих эксцентриситета, например ёх. превышает половину шага расW . тра, т.е. ёх - -Н-Лехне трудно
видеть, с учетом формулы (2), что сигналы Ui и Уз сдвинуты по фазе на угол (180° + Д0),
Дё
где Дб ди , а сами сигналы Ui и Уз
принимают вид:
Ui Um-sln(ft t+180°+ А0);
, U3 Um $ln(a t-180°-A0).
Из полученных соотношений следует, что сигналы Ui и Уз могут быть синфазными в двух случаях, когда;
Ui Um-sln(ftn + 180°);(3)
U3 Um-sln(y t-180°),(4)
т.е. при частичном компенсационном смещении растров вдоль линии 2-4 на величину , при котором фазовый сдвиг А Остановится равным нулю, и в случае когда
Ui U3 Um-sln ut,(5)
т.е. при полном компенсационном смещении растров вдоль линий 2-4 на величину
е-х ™+Дёх,
при котором фазовый сдвиг (180° + Д# ) 0.
В первом случае сигналы (3) и (4), находясь в фазе между собой, в то время сдвинуты по фазе к измерительным сигналам другой пары на 180°, что свидетельствует о наличии в растровом сопряжении нескомпенсированного эксцентриситета,
$ равного -у.
Во втором случае измерительные сигналы Ui и Us, находясь в фазе между собой, находятся также в фазе с другой парой измерительных сигналов U2 и У$, что свидетельствует о том, что эксцентриситет в
растровом сопряжении сведен к нулю.
Из рассмотренного видно, что максимальная величина эксцентриситета, при которой еще обеспечивается надежное центрирование по данному способу, равна
шагу растров, что в четыре раза превышает диапазон центрирования по известному способу.
На фиг. 3 приведена одна из возможных конструктивных схем, обеспечивающая центрирование двух вращающихся растров. Схема содержит приводы 1 и 2, на осях которых закреплены соответственно первый и второй подвижные растры, а в их корпусах закреплены осветители и фотоприемники; цилиндрическую деталь 3, к торцам которой крепятся с помощью винтов приводы 1 и 2; основание 4, на котором неподвижно закреплена деталь 3, с приво- дами 1 и 2; микровинты 5 и б, обеспечивающие перемещение привода 1 в направлении +У- Микровинты 7 и 8, обеспечивающие перемещение привода 1 в направлении ±х, не показаны.
Центрирование производится следующим образом.
При вращающихся растрах, закрепленных на приводах 1 и 2, по фазовому сдвигу сигналов 1М и U2 определяют величину и направление составляющей эксцентриситета ву. Слегка отпустив винты, крепящие привод 1 к детали 3, с помощью микровинтов 5 или 6 обеспечивают перемещение привода 1 с первым вращающимся растром относи- тельно второго вращающегося растра на оси привода 2 до момента совпадения фаз сигналов U4 и Ua с фотоприемников 4 и 2, что соответствует тому, что еу 0.
Аналогичным образом производят one- рацию устранения составляющей эксцентриситета путем перемещения привода 1 в направлении оси + х, с помощью микровинтов 7 и 8 (не показаны) до совпадения фаз сигналов Ui и из.
После устранения составляющих и Щ отпущенные винты затягивают, фиксируя тем самым соосное положение растров.
По предлагаемому способу исключается влияние переменных эксцентриситетов растров (el) относительно своих осей на погрешность центрирования, что иллюстрируется построениями на фиг. 4.
На фиг. 4 отрезок 0-0i характеризует несоосность двух вращающихся осей, на ко- торых закреплены растры, отрезок СИ-Оа характеризует суммарный переменный эксцентриситет (е) двух растров относительно своих вращающихся осей, который равен
е ei + ёа,
где ei, еа - соответственно эксцентриситеты первого и второго растров относительно своих осей вращения.
При этом, как следует из фиг. 4а, при относительном вращении растров вектор эксцентриситета е совершает круговое вращение относительно точки СМ.
В общем случае пространственное смещение двух растров можно представить как
ej. i + e -cosy,
При углах у, равных 0 и 180° вектор эксцентриситета «Г совпадает с направлением отрезка O-Oi, т.е. с вектором смещения осей, и в первом случае он с ним складывается, т.е.
е г ё + е (отрезок О-Оз). а во втором - вычитается:
е i-e (отрезок 0-04).
Проекция этих векторов на ось х представляет
е ъ + ех.
л
Поскольку в диаметрально противоположных направлениях х располагаются два фотоприемника (2 и 4), то в них формируются сигналы вида:
U2 Im-sln ft H Ц + А $ ; U4-Um-Sfn QH + (Vt А0 }(б)
Принимая один из этих сигналов за опорный, например U2, не трудно видеть, что фазовый сдвиг сигнала U4 по отношению к U2 составляет 2tf, при этом фазовый сдвиг, как следует из соотношений (6), подвержен фазовой модуляции с амплитудой + 2 с периодичностью каждого относительного разворота растров (фиг. 46).
В практических случаях никогда не удается полностью устранить эксцентриситет растров (ei и ez к своим осям вращения. Поэтому в предлагаемом способе измерительный сигнал, например 1)4, всегда подвергается фазовой модуляции и задача центрировки осей сводится к обеспечению совмещения среднего значения измерительного сигнала, Щср) с опорным Ui(on) при обеспечении симметричности фазовой модуляции (фиг. 4в). В этом случае с высокой точностью сведена к нулю составляющая эксцентриситета ёх несмотря на присутст; вне фазовой модуляции в измерительном сигнале.
В практических случёях наиболее точный результат получается, когда в качестве фазоизмерительного устройства используется стрелочный фазометр, который при измерении фазового сдвига измеряемых сигналов в силу большой инерционности магнитоэлектрической системы практически не реагирует на биение фазы от наличия эксцентриситета фиксирует с достаточно высокой точностью среднее значение фазы измерительного сигнала 2, которое поданному способу сводят до нуля.
Таким образом, предлагаемый способ в сравнении с известным обеспечивает более высокую точность центрирования за счет увеличения вдвое его чувствительности и исключени влияния на погрешность центрирования переменного эксцентриситета растров относительно своих осей.
Формула изобретения
Способ центрирования двух независимо вращающихся круговых растров, заключающийся в том, что направляют на растровое сопряжение пучки лучей, регистрируют посредством первого и efbporo фотоприемников интенсивность пучков лучей, прошедших через растровое сопряжение в первой Гвторой зонах, расположенных так, что прямые, соединяющие каждую из этих
зон с центром растрового сопряжения, взаимно перпендикулярны, смещают растры в двух взаимно перпендикулярных направлениях до совмещения фаз сигналов с первого и второго фотоприемников, отличающийся тем, что, с целью повышения точности центрирования, приводят оба растра во вращение, обеспечивая их относительное угловое перемещение с постоянной скоростью, дополнительно регистрируют посредством третьего и четвертого фотоприемников интенсивность пучков лучей, прошедших через растровое сопряжение в третьей и четвертой зонах, каждая из которых распо
5
ложена диаметрально противоположно соответственно первой и второй зонам растрового сопряжения, по величине и знаку фазового сдвига между сигналами с выходов первого-третьего и второго-четвертого фотоприемников определяют величину и направление эксцентриситета, производят относительное перемещение вращающихся растров по двум взаимно перпендикулярным направлениям, совпадающим с направлениями расположения первого и третьего, второго и четвертого фотоприемников, до совмещения фаз сигналов в каждой из этих пар фотоприемников.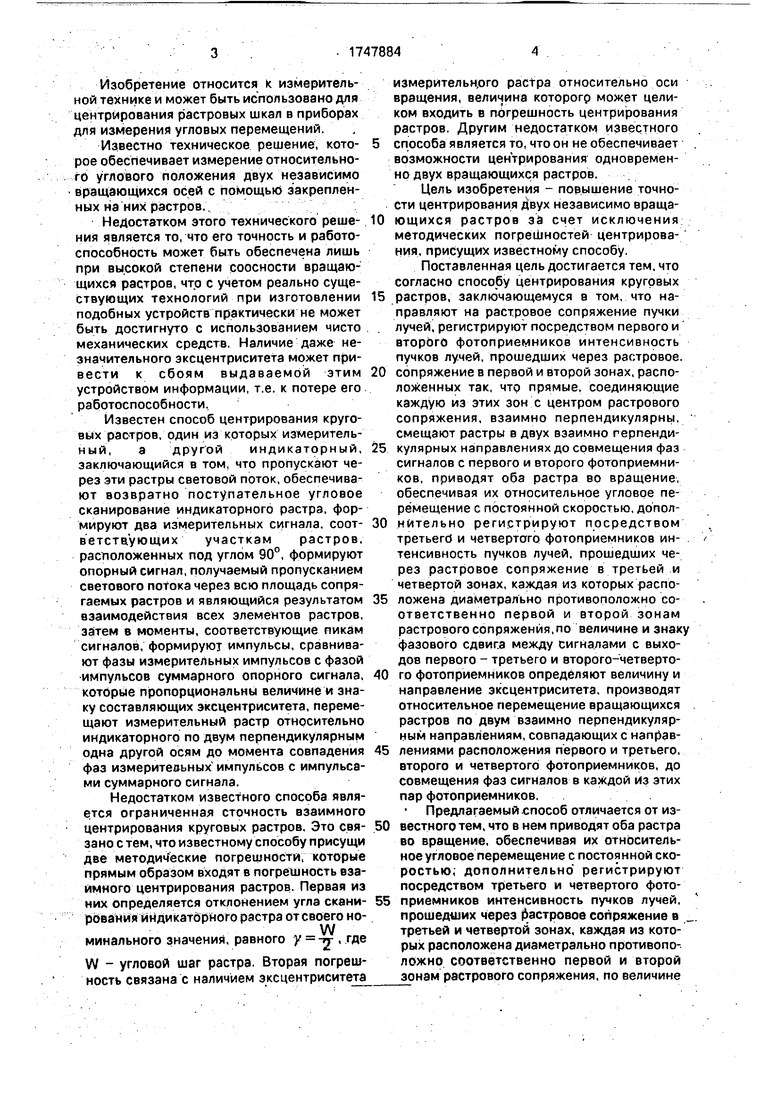



| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический преобразователь перемещения в код | 1989 |
|
SU1676102A1 |
| Способ измерения углового перемещения объекта | 1989 |
|
SU1791705A1 |
| Устройство для измерения перемещения объекта | 1990 |
|
SU1779923A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МНОГОФАЗНОГО ПЕРИОДИЧЕСКОГО СИГНАЛА | 1991 |
|
RU2017063C1 |
| Индикаторный растр к четырехканальному фотоэлектрическому измерительному преобразователю | 1987 |
|
SU1583735A1 |
| Оптический растровый датчик | 1980 |
|
SU949501A1 |
| Фотоэлектрический преобразователь перемещения в фазовый сдвиг сигнала | 1982 |
|
SU1030828A1 |
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| Фотоэлектрическое устройство для измерения угловых перемещений объекта | 1981 |
|
SU994910A1 |
| Способ измерения перемещений объектов и устройство для его осуществления (его варианты) | 1983 |
|
SU1190190A1 |


Изобретение относится к контрольно- измерительной технике и может быть использовано для центрирования круговых растров. Цель изобретения - повышение точности центрирования за счет исключения влияния эксцентриситета измерительного растра на результаты центрирования. При вращении растров Pi и Р2 на своих осях будет происходить модуляция светового потока. Фазовые сдвиги сигналов, формируемых двумя парами фотоприемников 1-3 и 2-4, пропорциональны проекциям вектора эксцентриситета на оси X и Y. Перемещают один вращающийся ротор Pi относительно второго Ра до момента совпадения фаз сигналов с выхода фотоприемников 1-3 и 2-4 соответственно. 4 ил.
в
Фиг.1
и.
Фиг.2
а
ЧМ
/
(мгр)
Фиг. 4
| Фотоэлектрический преобразователь перемещения в код | 1984 |
|
SU1259483A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ КРУГ01еЫХ РАСТРОВ | 0 |
|
SU340884A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
