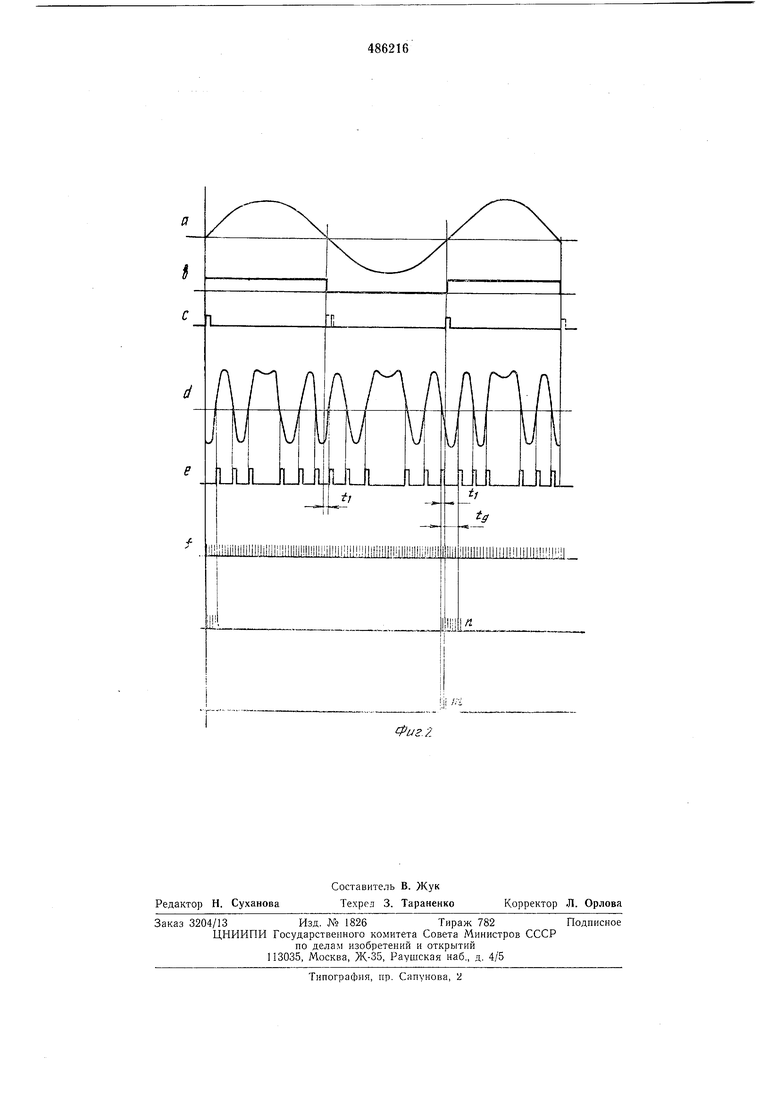
каторного растра 2, выполиенный, например, в виде датчика перемещения индикаторного растра 2, формирователь 7 опорных импульсов с в моменты перехода индикаторным растром 2 через ось сканирования, соответствующую его среднему положению, блок 8 измерения временных интервалов и блок 9 определения отношения временных интервалов. Растровое сопряжение датчика 1 может быть выполнено, например, фотоэлектрическим с источником 10 и приемником М света. Предлагаемый способ измерения заключается в следующем. С помощью привода 4 индикаторному растру 2 сообщают колебательное движение, чем обеспечивается сканирование растра 2 относительно измерительного растра 3. Это сканирование производит модуляцию потока, например светового, проходящего через растры 2 и 3 от источника 10 к приемнику И. Совпадению зрачков растров 2 и 3 соответствуют положительные пики выходного сигнала d на выходе приемника 11 датчика 1, а перекрытию зрачков растров 2 и 3 соответствуют отрицательные пики этого сигнала. В области линейной зависимости перемещения растра 2 от времени перемещения растра 2 на одИН шаг датчика 1 соответствует один период выходного сигнала d датчика 1. Этот период включает в себя один положительный и один отрицательный пики сигнала d. При помощи датчика 6 получают опорный сигнал а, соответствующий перемещению индикаторного растра 2. Максимальному перемещению растра 2 вправо от оси сканирования (т. е. оси колебаний растра 2) соответствует восходящая положительная ветвь графика сигнала а. Перемещению растра 2 влево соответствует уменьщение сигнала а. Ам плитуду колебаний индикаторного растра 2 устанавливают больше половины шага датчика. Например, при максимальном перемещении растра 2 вцраво от оси сканирования возникают два отрицательных пика сигнала d и между ними один .положительный пздк (фиг. 2). Это означает, что в этом случае амплитуда колебаний индикаторного растра 2 составляет, примерно, полтора шага датчика 1. С помощью формирователя 7 сначала преобразуют сигнал а в прямоугольные импульсы 6, от переднего и заднего фронта которых формируют опорные импульсы с в моменты перехода растром 2 через ось сканирования. При этом опорные импульсы с, сформированные от переднего фронта импульсов Ь, соответствуют направлению сканирования растра 2 вправо, а опорные им1пульсы с, сформированные от заднего фронта импульсов Ь, соответствуют направлению сканирования растра 2 влево. С помощью формирователя 5 формируют импульсы е полушага датчика 1 через каждый полупериод его выходного сигнала d. Например, импульсы е можно формировать в моменты перехода сигнала d через уровень, равноотстоящий от максимального и минимального уровней сигвала d. С помощью измерительного генератора эталонной частоты (не показан), входящего в состав блока 8, измеряют временной интервал tg полушага датчика 1, ограниченный двумя соседними импульсами е полушага датчика 1 и включающий в себя момент возникновения опорного импульса с. Одновременно с этим измеряют часть этого интервала, а именно интервал ь между одной из границ интервала tg и моментом возникновения опорного импульса с на этом интервале g. Интервал /i соответствует искомому .перемещению. Случай измерения интервала ti, показанный на фиг. 2 в качестве примера, соответствует перемещению индикаторного растра 2 вправо. В авязи с этим измеряется интервал tg, на котором возник импульс с, сформированный от переднего фронта импульса Ь. Измерение интервалов ti и tg производят следующим образом. При возникновении очередного импульса е сначала гасят счетчик импульсов (не показан), входящий в блок 8, а затем начинают подсчитывать этим счетчиком имюульсы / эталонной частоты, подаваемые от измерительного генератора, входящего в блок 8. В момент возникновения опорного импульса с интерв.ал t оказывается измеренным количестаом т импульсов f. Число m из счетчика передают в блок 9. Далее счетчик продолжает счет импульсов до момента появления соседнего импульса е. В этот момент прекращают подачу импульсов f в счетчик, но не гасят его. Интервал tg оказывается измеренным количеством импульсов /. Далее число п передают из счетчика в блок 9, с помощью которого определяют отношение ti/tg m/n, соответствующее искомому перемещению, выраженному в долях шага датчика 1. Значение искомого перемещения в любых требуемых единицах можно найти также в блоке 9, умножив отношение min на цену шага датчика 1, выраженную в требуемых единицах. Предмет изобретения Способ измерения перемещений при помои датчика, выполненного в виде растрового опряжения с возможностью возвратнонпостуательного сканирования индикаторного астра, отличающийся тем, что, с целью овышения точности и скорости измерений, станавливают амплитуду сканироваиия болье половины шага датчика, формируют соотетствуюшие направлению сканирования опорые импульсы в моменты перехода индикаорного растра через ось сканирования, в аждый полупериод выходного сигнала датчика формируют импульсы полушага, измеряют временной интерв:ал, ограниченный двумя соседними импульсами полушага и включаюш,ий в себя момент возникновения опорного импульса, измеряют часть этого интервала 5
между одной из его границ и моментом возникновения опорного имлульса на этом интервале и определяют отношение измеренного значения части интервала к измеренному значению всего интервала.

| название | год | авторы | номер документа |
|---|---|---|---|
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Измерительный частотно-импульсный преобразователь | 1985 |
|
SU1302149A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2091708C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ КРУГ01еЫХ РАСТРОВ | 1972 |
|
SU340884A1 |
| КОМБИНИРОВАННЫЙ ПОЗИЦИОНИРУЮЩИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ ЭЛЕКТРОМАГНИТНО-ИНДУКЦИОННОГО ТИПА | 2020 |
|
RU2759209C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ В ДАТЧИКАХ С МНОГОЭЛЕМЕНТНЫМИ ПРИЕМНИКАМИ ИЗЛУЧЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2508524C2 |
| Устройство для бесконтактного измерения диаметров и перемещений изделий | 1987 |
|
SU1439402A1 |
| Способ определения времени распространения упругих волн и устройство для его осуществления | 1988 |
|
SU1509775A1 |
| Измерительный преобразователь перемещений | 1991 |
|
SU1779921A1 |
./.
