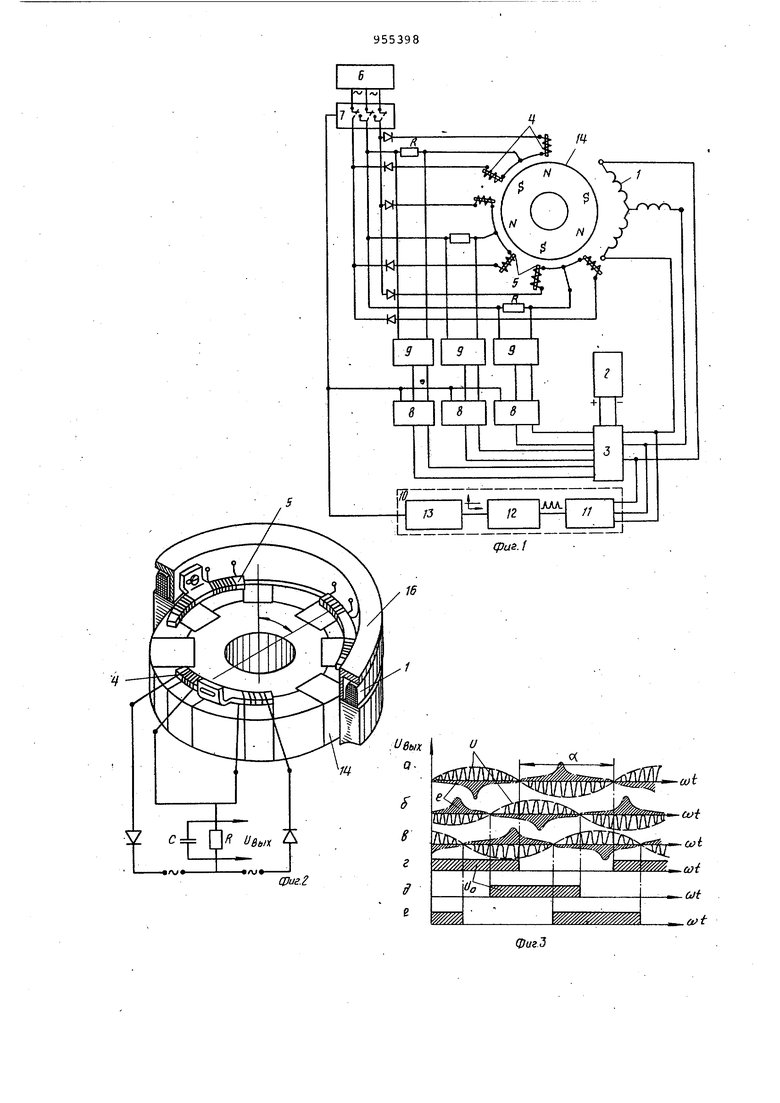
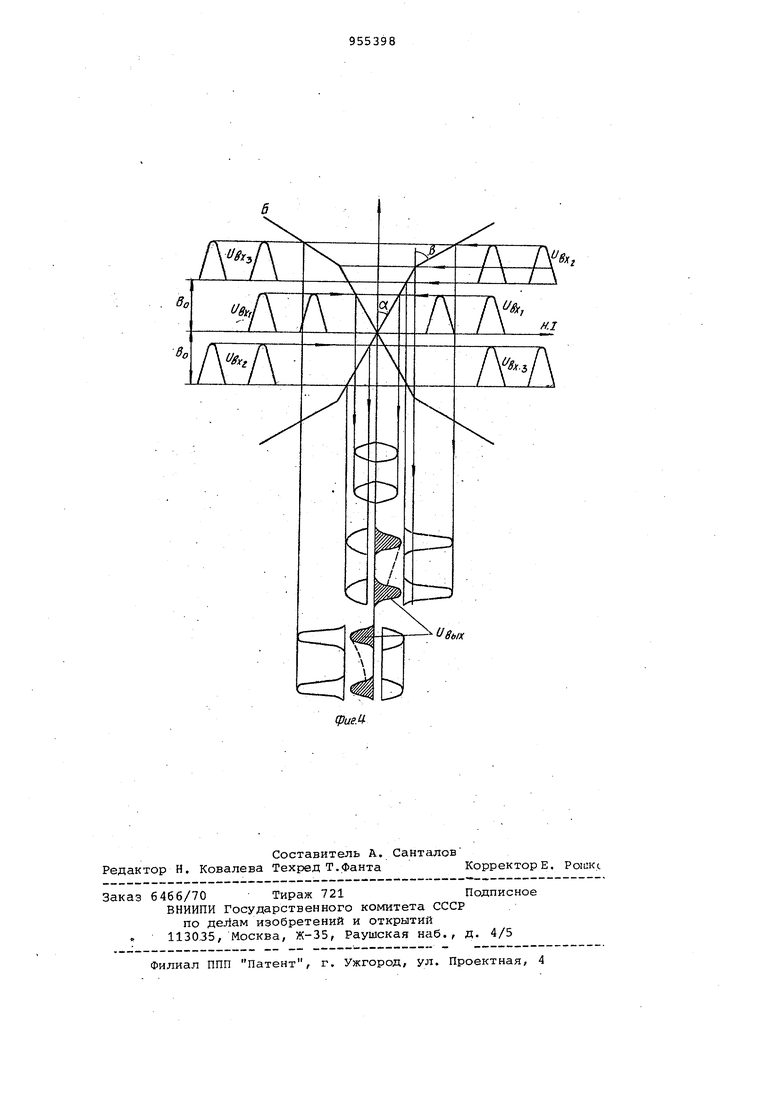
по дифференциальной схеме, а чувствительные элементы расположены против торцовой поверхности ротора-дви гателя. Причем длина сердечников по край ней мере в три раза превышает их ши рину. Кроме того, сердечники по кра ней мере чувствительного элемента .выполнены в виде ферромагнитной дет ли. Кроме того, вентильный электродвигатель снабжен инвертирующими эл ментами, по числу чувствительных эле ментов, электронным переключателем и управляющим органом/ включающим в себя последовательно соединенны дифференцирующую цепочку, интеграто и компаратор, причем обмотки индукт ных чувствительных элементов подклю чены к полупроводниковому коммутатору через инверторы; вход каждой диф ференцирующей цепочки подключен к вы ходу коммутатора, а выход компаратора соединен с электронным переключателем и инвертором. Электродвигатель снабжен нуль-орг ном, выполненным между чувствительными элементами и коммутатором. На фиг. 1 приведена функциональная схема бесконтактного электродвигателя; на фиг, 2 - конструктивное исполнение индуктивных элементов и схема их включения на примере ВД с ротором, содержащими намагниченные в тангенциальном направлении постоян ные магниты, расположенные между полюсами из магнитомягкого материала на фиг. 3 - диаграммы напряжений на выходе датчика цоложения ротора; на фиг. 4 - качественная картина зависимостей В(И) f(H, I), поясняющая принцип работы датчика положения ротора, где В - индукция в сердечнике , Н - напряженность, U - напряжение на обмотке датчика, I - ток в ней. . : . Секции обмотки 1 якоря подключены к источнику 2 питания через полупроводниковый коммутатор 3. Обмотки 4 индуктивных элементов, размещенные на ферромагнитных разомкнутых сердечниках 5, попарно соединены по дифференциальной схеме с однопол у пер йодным выпрямлением и подкл чены к источнику 6 переменного напряжения непосредственно или через электронный ключ 7. Сигналы обмоток индуктивных элементов, выделенные на активных сопро тивлениях, поступают в полупроводниковый коммутатор 3 непосредственно, через инверторы 8 или через электрон ные нуль-органы 9. В случае введения инвертора и электронного ключа 7к их входам подключается дополнительный управляющий электронный,орган 10, состоящий из последовательно соединенных дифференцирующей цепочки 11, интегратора 12 и компаратора 13, при этом вход дифференцирующей цепочки 11 подключается к выходам полупроводникового коммутатора 3. Сердечники 5 индуктивных элементов одной пары устанавливаются относительно постоянных магнитов, закреп(Ленных на роторе 14 двигателя, что в каждый момент-времени через них проходит магнитный поток одинаковой величины. С этой целью может быть предусмотрена дополнительная подрегулировка в процессе их установки. Причем показаны варианты выполнения сердечников 5 в виде единой детали (фиг. 2). Также показана установка 15 полюсных наконечников со стороны, обращенной к постоянным магнитам ротора (выноска 1) и ферромагнитного экрана 16, охватывающего лобовые части обмотки статора электродвигателя. В качестве насыщающего потока могут быть использованы не только торцовые потоки рассеяния ротора (фиг. 2), но и радиальные потоки рассеяния или част.ь рабочего потока ротора двигателя. Диаграммы выходных сигналов с датчика (фиг. За, б, в) соответствуют режимам работы устройства при подключенном (и f(6ut) и отключенном (е f (со t) источнике 6 переменного напряжения. Там же (фиг. Зг, д, е) показаны сформи Ьованные импульсы вы-, .ходного напряжения Uo (tot) при подключении электронных нуль-органов. Проходящая через нуль (За,б,в) огибающая импульсов выходного напряжения, датчика, при включенном источнике переменного напряжения, имеет синусоидную форму, что позволяет значительно упростить полупроводниковый коммутатор, в качестве которого может быть использован обычный. .усилит:ель мощности, при этом огибающая импульсов может быть получена, в частности шунтированием выходного сопротивления R емкостью С. Возможность получения указанных выше функциональных зависимос.тей на выходе датчика (фиг. 4) поясняется качественной картиной BjJ/ (Н, I).. Здесь показаны кривые намагничивания (А, Б) каждого из сердечников одной пары, импульсы напряжения от источника переменного напряжения (П9х) и импульсы выходного напряжения(.и вых1. Итак, качественная картина работы отдельного индуктивного элемента аналогична принципу действия дросселя насыщения с подмагничиванием. На начальном участке наклон кривой намагничивания ( об ) определяется проводимостью рассеяния магнитному потоку, создаваемому обмотками при ненасыщенных сердечниках, при их насыщении потоками рассеяния постоянных магнитов ротора двигателя, наклон будет тем больше (угол f) , чем больше д;1ина намотки, что определяет со- блюдение основного условия при выборе размера сердечников (длина значи- 5 тельно больше размеров,- определяющих его поперечное сечение).
При отсутствиинамагничивания CUftx) комплексное сопротивление обмоток, включенных по схеме (фиг. 1 - ю и 2) одинаково и выходное напряжение равно нулю.
В том же случае, когда сердечники подмагничены потоками разного направления (± BO), появится выходное на- .г пряжение (Ugbixlf обусловленное разностью когшлексных сопротивлений обмоток, поскольку магнитное состояние одного из сердечников будет характеризоваться кривой намагничива ия с vrir лом наклона .с6 , а другого - р. ,
При изменении направления внешнего поля в обоих сердечниках (Ugx2 Ugx ) изменится полярность импульсов выходного напряжения. Из принципа работы датчика видно, что угол pi не может быть малым, т.е. магнитная цепьне может быть замкнута,поскольку в этом алучае как при отсутствии поля постоянных магнитов рохора, так и при его действии за счет насыщения сердечни- 30 ков полем, создаваемым обмотками инуктивных элементов, комплексное сопротивление обмоток будет одинаковым.
Принцип работы датчика рассматривают при условии, что потоки постоян-35 ных магнитов ротора в сердечниках одной пары имеют противоположное направение . Однако данное условие не является обязательным, так как при одинаковом направлении потоков постоянного 40 агнита необходимоf чтобы полярность мпульсов, питающего напряжения (Ug ) была различна.
Существенным является равенство значений потоков в каждый момент вре- 45 ени, так как только, в этом случае обеспечивается стабильность и симметичность сигналов выходногонапряжения..
Устройство работает следующим образом..CQ
При подаче переменного напряжения от источника б на обмотки 4 индуктив- . ных элементов, сигналы с датчика при отсутствии ноль-органов и инверторов-, непосредственно поступают на вход полупроводникового коммутатора 3.
Функция полупроводникового коммутатора сводится, например, при синусно-косинусном управлении к усилению сигналов за счет мощности источника 2 питания и соответствующему 60 распределению выходных напряжений по фазам обмотки 1 статора электродвигателя.
Надлежащей установкой полюсных наконечников 15 и экрана 16 обеспе- 65
чивается требуемая форма сигналов с датчика.
При дискретном управлении целесообразным техническим приемом следует считать установку нуль-органов 9, формирующих импульсы DO f((ot) в момент прохождения огибающей выходных напряжений с датчика через нуль (фиг. 3), так .как при этом исключается влияние эксплуатационных условий уа точность формирования импульсов,. подающихся на обмотки статора электродвигателя.
Достоинством рассматриваемого бесконтактного электродвигателя постоянного тока является возможность выбора малой величины сопротивления R, на которых выделяются сигналы выходных напряжений с датчика, так как при этом достигается высокая помехоустойчивость, обусловленная, в частности, малым влиянием ЭДС индукции, возникающей в обмотках индуктивных элементов при вращении ротора. 4 В то же самое, время, при дискретном управлении возможно обеспечение режимов работы электродвигателей, при котором после достижения ротором определенной скорости вращения, источник переменного напряжения от лючается, а обмотки индуктивных элементов замыкаются с обеспечением выделения сигналов на сопротивление от.наводимого в них ЭДС ИНДУ.КЦИИ. Указанная операция осуществляется электронным переключателем 7.
При этом необходима установка инверторов 8, так как ЭДС индукции будет иметь обратную полярность по отношению к импульсам выходного напряжения датчика, выделяющихся на сопротивлении при подключенном источнике переменного напряжения.
Автоматическое отключение и подклчение источника переменного напряжения производится с помощью дополнительного электронного органа 10, вклчающего в себя последовательно соединенные дифференцирующую цепочку 11, ,интегратор 12 и компаратор 13.
Дифференцирующая цепочка 11 подключена к выходам полупроводникового коммутатора 3. По мере разгона электродвигателя будет меняться частота импульсов на ее выходе пропорционально скорости вращения ротора.
Уровень напряжения на выходе интегратора 12 будет тем больше, чем больше частота и, следовательно, скорость вращения ротора.
При некоторой величине выходного напряжения интегратора срабатывает компаратор 13 и подает команду на электронный переключатель 7 и инверторы 8.
При снижении скорости вращения электродвигателя до определенного уровня происходит отключение компаратора и соответствующее отключение инверторов 8 и подключение источника переменного напряжения.
Такой способ управления позволяет резко снизить мощность, затрачива-. емую на управление электродвигателем.
Формула изобретения
1. Вентильный электродвигатель, содержащий ротор с расположенными из ftBM постоянными магнитами, статор с рбмоткой якоря, секций которой соединены с выходом полупроводникового коммутатора, управляющие цепи ключей которого подключены к выходу индуктивного датчика положения ротора, чувствительные элементы которого выполнены в виде ферромагнитного сердечника, на котором расположена обмотка, соединенная с источником высокой частоты через резистор и.диод, причем резистор соединен с управляющими цепями ключей коммутатора, о т ли ч а ю щи и ся тем, что, с целью . снижения массы и габари ов, ферромагнитные сердечники выполнены разоМкнуТЫМИ-, каждый чувствительный элемент снабжен аналогичными диодами, ферромагнитным сердечником и обмоткой, соединенной с первой обмоткой и источ НИКОМ высокой частоты по дифференци ьной схеме, а чувствительные элементы расположены против торцовой поверхности ротора двигателя.
2.Электродвигатель по п. 1, отличающийся тем, что длина сердечников по крайней мере -в три раза превышает их ширину.
3.Вентильный электродвигатель
по п. 1и2, отличающийся тем, что сердечники по крайней мере чувствительного элемента выполнены в виде ферромагнитной детали.
4.Электродвигатель по пп. 1-3, отличающийс.я тем, что
он снабжен инвертирующими элементами по числу чувствительных элементов, электронным переключателем и управляющим органом, включающим в себя послдовательно соединенные дифференцирующую Цепочку, интегратор и компаратор, причём обмотки индуктивных чувствительных элементов подключены к полупроводниковому коммутатору через инверторы; вход каждой дифференцирующей цепочки подключен к выходу коммутатора, а выход компаратора соединен с электронным переключателем и инвертором.
5.Вентильный электродвигатель по пп. 1-4, отличающийся тем, что он снабжен нуль-органами, включенными между чувствительными элементами и коммутатором.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР. № 471639, кл. Н 02 К 29/02, 1975.
2.Патент Японии №39-13675, кл. 55 А 42, 1964.
V
т
В,
w
8,
.г
ш
%
л/
1ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1990 |
|
SU1791924A1 |
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006143C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2173931C1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Вентильный электродвигатель | 1978 |
|
SU785929A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПАРАЗИТНЫХ ИМПУЛЬСНЫХ ВОЗМУЩЕНИЙ В СЕТЯХ ЭЛЕКТРОПИТАНИЯ С ПЕРЕМЕННЫМ НАПРЯЖЕНИЕМ | 2002 |
|
RU2239201C2 |
| Реверсивный вентильный электродвигатель | 1975 |
|
SU663036A1 |