Изобретение относится к области средств автоматизации и робототехники и может быть использовано как в этих областях, так и в ряде других, где в качестве исполнительного элемента применяются управляемые бесколлекторные двигатели.
Бесколлекторный двигатель постоянного тока представляет собой электромеханическую систему, в которой магнитный поток возбуждения создается постоянными магнитами, расположенными на роторе, а якорные обмотки размещаются на статоре. Коммутация обмоток якоря машины осуществляется управляемым коммутатором по сигналам датчика положения. Наличие электронного блока управления, с помощью которого реализуются возможности регулирования параметрами рабочих характеристик двигателя, бесконтактный способ передачи энергии в якорные обмотки и ряд других факторов обуславливает перспективность использования бесколлекторных двигателей в технике [1 - 3].
В качестве примера можно привести двигатель по заявке ФРГ N 2927958, кл. H 02 К 29/02, где для регулирования скорости используется тахогенератор, или двигатель по патенту Великобритании N 21022222 от 13.07.82 г., в котором коррекция механической характеристики осуществляется за счет переключения якорных обмоток по сигналу, поступающему от датчика скорости. Известна схема управления бесколлекторного двигателя по патенту России N 1748607, кл. H 02 К 29/14, в котором для стабилизации скорости используется широтно-импульсная модуляция токов якорных обмоток. Длительность коммутирующих импульсов формируется с использованием управляемого датчика положения, на один из входов которого поступает сигнал обратной связи по скорости. Недостатком подобной схемы является ее низкая надежность, связанная с конструктивной и схемной сложностью реализации подобного датчика и необходимостью компенсации в нем дестабилизирующих факторов.
Наиболее близким к предлагаемому техническому решению является устройство управления бесколлекторным двигателем по авторскому свидетельству СССР N 256038, кл. H 02 К 29/06. Это устройство включает: датчик положения ротора, усилители на мультивибраторах, регуляторы длительности импульсов по числу якорных обмоток двигателя, электронный коммутатор и цепь обратной связи по скорости, в котором сигнал обратной связи по скорости формируется с помощью дополнительной обмотки в трансформаторе одного из мультивибраторов усилителя, выпрямителя и элементов регулятора длительности импульсов. Сигнал с выхода регулятора длительности импульсов подается на второй мультивибратор усилителя и изменяет интервал времени его открытого состояния, тем самым осуществляя широтную модуляцию коммутирующих импульсов.
Основными недостатками известного решения являются: сложность схемы формирования коммутирующих импульсов в устройстве управления бесколлекторным двигателем и наличия в нем большого количества трансформаторов, что снижает надежность устройства управления и практически исключает возможность его интегрального исполнения. Отсутствие в устройстве элементов электронной настройки параметров цепи обратной связи сужает область его применения.
Целью настоящего предложения является устранение указанных недостатков прототипа и расширение области применения бесколлекторных двигателей за счет обеспечения возможностей коррекции механических характеристик двигателя с помощью управляемой обратной связи. Поставленная цель достигается тем, что в устройстве автоматического управления бесколлекторным двигателем постоянного тока, содержащем датчик положения ротора, регуляторы длительности импульсов по числу якорных обмоток двигателя, электронный коммутатор и цепь обратной связи, содержащей схему формирования сигнала по скорости, в цепь обратной связи дополнительно введены схема сравнения, формирователь напряжения, определяющего порог срабатывания компаратора схемы сравнения, регулятор глубины обратной связи и интегратор. Каждый регулятор длительности импульсов выполнен в виде двух управляемых компараторов, детектора с обратно включенным диодом и детектора с прямо включенным диодом. Вход схемы формирования сигнала по скорости подключается к одному из выходов регулятора длительности импульсов, а ее выход подключен к первому входу схемы сравнения, второй вход схемы сравнения подключен к выходу формирователя напряжения, определяющего порог срабатывания схемы сравнения, выход схемы сравнения подключен к первому входу регулятора глубины обратной связи, второй вход которого подключен ко второму выходу формирователя напряжения, определяющего порог срабатывания компаратора схемы сравнения, выход регулятора глубины обратной связи через интегратор и резисторы подключен к первому входу второго управляемого компаратора и ко второму входу первого управляемого компаратора каждого регулятора длительности импульсов. К первому и второму входам формирователя напряжения, определяющего порог срабатывания компаратора схемы сравнения, подключены внешние источники управляющих сигналов. Выходы датчика положения ротора, выполненного в виде датчика угла, через резисторы подключены к первым входам первого и второго управляемых компараторов соответствующего регулятора длительности импульсов. Вторые входы вторых управляемых компараторов объединены и подключены к общей шине устройства автоматического управления бесколлекторным двигателем. Выход первого управляемого компаратора каждого регулятора длительности импульсов через детектор с обратно включенным диодом подключен к соответствующему первому входу электронного коммутатора, выход второго управляемого компаратора каждого регулятора длительности импульсов через детектор с прямо включенным диодом подключен ко второму соответсвующему входу электронного коммутатора, выходы электронного коммутатора подключены к соответствующим входам якорных обмоток двигателя, вторые входы якорных обмоток объединены и подсоединены к общей шине устройства управления бесколлекторным двигателем.
Работа устройства поясняется чертежами, изображенными на фиг. 1 - 4.
На фиг. 1 изображены естественная механическая характеристика двигателя (прямая CD) и семейство искусственных механических характеристик (CAB, CA'B') при различных значениях установочного напряжения, определяющего порог срабатывания цепи обратной связи.
На фиг. 2 изображена блок-схема устройства автоматического управления бесколлекторным двигателем для варианта с двухфазной якорной обмоткой.
На фиг. 3 показаны варианты временных диаграмм коммутирующих импульсов при изменении величины сигнала обратной связи U.
На фиг. 4 представлены временные диаграммы напряжений на выходе элементов устройства автоматического управления бесколлекторным двигателем.
Автоматическое управление бесколлекторным двигателем осуществляется за счет совместной обработки сигналов, поступающих с датчика положения ротора и цепи обратной связи. Использование регулируемой обратной связи позволяет изменять параметры механической характеристики в соответствии с требуемым законом управления. Естественная механическая характеристика двигателя постоянного тока, не охваченного обратной связью, описывается известным уравнением вида n = n0 - k1M, или М (n0-n)/k1, где n0 - число оборотов холостого хода, М - момент двигателя, k1 - коэффициент жесткости механической характеристики двигателя. При введении в схему управления двигателем сигнала обратной связи (см. приложение ниже), корректирующего длительность рабочих импульсов, механическая характеристика видоизменяется и приобретает вид
M = [(n0-n)/k1][l - k2(n-nос)], при n ≥ nос,
где k2 - коэффициент глубины обратной связи:, nос - число оборотов двигателя, при превышении которого в цепь регулирования начинает поступать корректирующий сигнал.
Механические характеристики двигателя для различных значений nос приведены на фиг. 1. Как видно из графика, при числе оборотов n < nос двигатель работает в режиме неуправляемого двигателя, при n ≥ nос - переходит в режим стабилизации (участок AB). Параметры k и nос регулируются путем изменения напряжения, подаваемого на управляющие входы формирователя напряжения установки.
Устройство автоматического управления бесколлекторного двигателя в общем случае имеет m каналов управления по числу фаз якорных обмоток, и, следовательно, используемый в устройстве датчик положения ротора должен иметь m выходов, аналогично электронный коммутатор 2m входов и m выходов.
В качестве датчика положения используются датчики угла, выходной сигнал которых определяется угловым рассогласованием положения ротора относительно статора. Для этих целей наиболее целесообразно использовать индуктивные или емкостные датчики. Возможно использование датчиков Холла, или вращающихся трансформаторов. Преимуществом таких датчиков является то, что величина выходного сигнала однозначно определяется угловым рассогласованием статора и ротора и не зависит от скорости вращения ротора и других факторов. Выходной сигнал в зависимости от угла рассогласования описывается либо синусоидой, либо последовательностью знакопеременных равнобоких импульсов.
Рассмотрим работу устройства для случая двухфазного бесколлекторного двигателя фиг. 2, в котором датчик положения ротора формирует сигнал синусоидальной формы. Оно содержит датчик положения ротора 1, регуляторы длительности импульсов 2 и 3, электронный коммутатор 4 и цепь обратной связи 5. Регулятор длительности импульсов первого канала 2 включает: первый управляемый компаратор 6, второй управляемый компаратор 7, детектор с обратно включенным диодом 8, детектор с прямо включенным диодом 9. Регулятор длительности импульсов второго канала 3 включает: первый и второй управляемые компараторы 10 и 11, детектор с обратно включенным диодом 12, детектор с прямо включенным диодом 13. Цепь обратной связи 5 содержит: схему формирования сигнала по скорости 14, схему сравнения 15, формирователь напряжения, определяющего порог срабатывания компаратора схемы сравнения 16, регулятор глубины обратной связи 17 и интегратор 18. На фиг. 2 также изображены не входящие в устройство автоматического управления якорные обмотки двигателя 19. В этом варианте исполнения двигателя на статоре размещаются две якорные обмотки, смещенные относительно друг друга в пространстве на 90o. Условно эти обмотки называют синусной и косинусной. Датчик положения ротора 1 имеет два выхода. По первому выходу датчика положения формируется сигнал, пропорциональный синусу угла рассогласования, по второму - косинусу.
При включении двигателя цепь обратной связи 5 блокирована, поэтому двигатель работает в неуправляемом режиме. Его механическая характеристика соответствует естественной характеристике двигателя постоянного тока. Работа управляемых компараторов 6, 7, 10 и 11 как в управляемом, так и в неуправляемом режиме проходит одинаковым образом. Для исключения появления сквозных токов в электронном коммутаторе 4 в моменты перекоммутации якорных обмоток двигателя на выход интегратора 18 возможна подача напряжения вольтдобавки. Это напряжение, складываясь с сигналом обратной связи, разделяет моменты отключения одной из якорных обмоток и включение другой. При разгоне двигателя увеличивается напряжение на выходе схемы формирования сигнала по скорости 15. Когда скорость вращения двигателя достигает значения nос (фиг. 1), сигнал, вырабатываемый схемой формирования сигнала по скорости 14, вызывает срабатывание компаратора, входящего в схему сравнения 15. Момент срабатывания определяется сигналом, поступающим с формирователя напряжения 16, определяющего порог срабатывания компаратора схемы сравнения. С этого момента включается цепь обратной связи и ее сигнал, снимаемый с выхода интегратора 18, начинает поступать на входы управляемых компараторов 6, 7 первого регулятора длительности импульсов 2, а также на входы компараторов 10, 11 второго регулятора длительности импульсов 3.
В устройстве автоматического управления бесколлекторного двигателя для коррекции механической характеристики используется широтно-импульсная модуляция напряжений, питающих якорные обмотки. Модуляция осуществляется с помощью регуляторов длительности импульсов 2 и 3 по сигналам, поступающим от датчика положения ротора 1 и от цепи обратной связи 5. При изменении уровня сигнала обратной связи меняется интервал времени, в течение которого протекает рабочий ток в якорных обмотках, а следовательно, средний за период электромагнитный момент, развиваемый двигателем. На фиг. 3 показано, как изменяется интервал открытого состояния одного из плеч компаратора при изменении напряжения обратной связи.
Назначение и работа отдельных элементов цепи обратной связи 5 следующие. Схема формирования сигнала по скорости 14 подключается своим входом к одному из выходов регуляторов длительности импульсов 2 или 3, выходной сигнал которых представляет собой последовательность прямоугольных импульсов с частотой, пропорциональной скорости вращения двигателя. С выхода схемы формирования сигнала по скорости 14 снимается последовательность импульсов, частота которых соответствует частоте входных импульсов, а следовательно, скорости вращения двигателя.
Схему формирования сигнала по скорости 14 можно реализовать (как вариант) с помощью последовательно включенных детектора, дифференцирующей цепочки и одновибратора. Сигнал на выходе дифференцирующей цепочки представляет последовательность коротких импульсов, соответствующих переднему фронту импульсов, поступающих после детектирования с выхода регулятора длительности импульсов. Эти импульсы поступают на вход одновибратора, который преобразует их в последовательность импульсов постоянной амплитуды и длительности.
Схема сравнения 15 может состоять из интегратора, компаратора и ключа. В этом варианте исполнения сигнал, поступающий с выхода схемы формирования сигнала по скорости 14 на первый вход схемы сравнения 15, подается на ключ и интегратор. В интеграторе из последовательности импульсов формируется постоянное напряжение, пропорциональное скорости вращения двигателя. Это напряжение поступает на компаратор, где сравнивается с напряжением, поступающим на схему сравнения 15 по ее второму входу с первого выхода формирователя напряжения, определяющего порог срабатывания компаратора схемы сравнения 16. При срабатывании компаратора вырабатывается сигнал, открывающий ключ. С этого момента сигнал, вырабатываемый схемой формирования сигнала по скорости 14, начинает проходить через схему сравнения 15 к первому входу регулятора глубины обратной связи 17. На второй вход регулятора глубины обратной связи 17. выполненного в виде делителя с изменяющимся коэффициентом деления, поступает сигнал со второго выхода формирователя напряжения 16. Выходной сигнал с регулятора глубины обратной связи 17 поступает на вход интегратора 18, выходное напряжение которого при этом начинает изменяться в соответствии с сигналом обратной связи. Это напряжение через резисторы поступает на входы управляемых компараторов 6, 7, 10, 11.
Параметры порога срабатывания схемы сравнения 15 и коэффициента передачи регулятора глубины обратной связи 17 определяются внешними источниками по входам 1 и 2 формирователя напряжения, определяющего порог срабатывания компаратора схемы сравнения 16, или, как вариант, может быть изменено с помощью переменных резисторов в этом формирователе. Регулятор глубины обратной связи 17 обеспечивает требуемый уровень сигнала обратной связи в режиме перестраиваемой стабилизированной скорости или в случаях необходимости коррекции механической характеристики.
Работа регуляторов длительности импульсов 2 и 3 осуществляется следующим образом. Сигнал с выхода датчика положения ротора 1 (фиг. 4а) через резисторы поступает на первые (инвертирующие) входы управляемых компараторов 6 и 7, 10 и 11, входящих соответственно в регуляторы длительности импульсов 2 и 3. Одновременно с выхода цепи обратной связи поступает управляющее напряжение на вторые (неинвертирующие) входы компараторов 6 и 10, а также на первые входы компараторов 7 и 11.
Компараторы 6 и 10 срабатывает в моменты, когда напряжения на их входах совпадают. На выходе компаратора устанавливается либо положительное, либо отрицательное напряжение в зависимости от того, какое из этих напряжений по входу 1 или входу 2 компараторов имеет большее значение. Временная диаграмма этого напряжения представлена на фиг. 4б.
Компараторы 7 и 11 имеет несколько иную схему подключения, в нем оба сигнала и с датчика положения 1, и с выхода цепи обратной связи 5 поступают на инвертирующий вход. Неинвертирующий вход при этом заземлен. Поэтому срабатывание компараторов 7 и 11 происходит в те моменты, когда на их инвертирующих входах сигналы взаимно компенсируются. Временная диаграмма напряжения на выходе компараторов представлена на фиг. 4в.
Напряжения с выхода компараторов 6 и 7 поступают на детекторы 8 и 9, представляющих собой выпрямители, собранные на базе обратно включенного и прямо включенного диодов. Напряжения на их выходах представлены на временных диаграммах фиг. 4г, 4д.
Импульсы напряжения, поступающие с выхода детектора 8 и детектора 12, подаются на первые входы соответствующих каналов электронного коммутатора 4, а на вторые входы электронного коммутатора 4 подаются импульсы напряжения с выходов детекторов 9 и 13. В результате на первом выходе электронного коммутатора формируется напряжение питания синусной якорной обмотки двигателя (фиг. 4е). Аналогично обеспечивается рабочий режим и на косинусной якорной обмотке по второму выходу электронного коммутатора. Схема электронного коммутатора 4 зависит от используемого источника питания. Наиболее просто эта задача решается при использовании двухполярного источника питания со средней заземленной точкой. В этом случае якорные обмотки одними своими концами подключаются к соответствующим выходам электронного коммутатора, а вторыми к общей заземленной точке устройства. Сигналы управления, поступающие последовательно к входам 1 и 2, 1' и 2' коммутатора, коммутируют соответствующие его плечи, подключая к якорным обмоткам то положительное, то отрицательное напряжение (фиг. 4е) и тем самым меняя направление тока в якорных обмотках. Для двигателей, имеющих m-фазную якорную обмотку, используется коммутатор, имеющий 2m входов и m выходов. Работа коммутатора в этом случае проходит по той же схеме.
Использование предлагаемого технического решения позволит расширить области возможного применения бесколлекторных двигателей и повысить их надежность. Анализ имеющейся технической информации показал, что на данный момент не известно аналогичное решение с приведенным составом существенных признаков (блоков и связей между ними). Это позволяет сделать вывод о соответствии материалов заявки критерию новизны технического решения задачи.
Библиографические данные.
1. Овчинников И.Е., Лебедев Н.И. Бесконтактные двигатели постоянного тока. - Л.: Наука, 1973 г.
2. Косулин В.Д., Михайлов Г.Б. и др. Вентильные электродвигатели малой мощности для промышленных роботов. - Л.: Энергоиздат, 1998 г.
3. Цаценкин В.К. Безредукторный автоматизированный электропривод с вентильными двигателями. - M.: МЭИ, 1991 г.
Приложение.
Механическая характеристика двигателя, охваченного обратной связью.
Естественная механическая характеристика двигателя постоянного тока описывается уравнением вида
где U - напряжение питания,
n - число оборотов двигателя,
Rя - сопротивление в цепи якоря,
Φ - поток возбуждения,
CE, CM - постоянные двигателя.
Момент, развиваемый двигателем, пропорционален току якоря,
M=CM Φ Iя,
при этом предполагается, что величина тока якоря не меняется в пределах одного оборота. Момент, развиваемый двигателем, можно варьировать, если в пределах оборота изменять величину тока якоря с помощью его модуляции.
M=Mн.у.[1+f(x)],
где Mн.у. - момент, развиваемый неуправляемым двигателем,
x - управляющий фактор.
Управление током в якорной обмотке можно реализовать с помощью той или иной модуляции тока. С точки зрения наибольшей экономичности и простоты реализации наиболее предпочтительной является ШИМ, когда отношение длительности импульсов якорной обмотки к максимально возможной определяется управляющим фактором, например текущим значением числа оборотов двигателя. Так как в этом случае момент, развиваемый двигателем, определяется длительностью импульсов, можно записать соотношение
где τ - длительность импульса тока в управляемом двигателе,
τ0 - длительность импульса при отсутствии управляющего сигнала.
Считая, что τ = τ(l-k2n), что справедливо при линейном управлении, получаем механическую характеристику управляемого двигателя в виде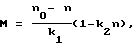
Анализ этих характеристик показывает, что, хотя механическая характеристика двигателя, охваченного обратной связью, обладает большей жесткостью, чем исходная, она не удовлетворительна, так как рабочий момент двигателя при тех же габаритно-весовых характеристиках в номинальном режиме оказывается существенно заниженным. Напрашивается вывод - обратная связь должна быть сильной, но задержанной, т.е. включаемой, когда двигатель разгоняется до числа оборотов, близкого к номинальному.
В этом случае механическая характеристика двигателя описывается уравнением
Как видно из фиг. 1 двигатель, охваченный задержанной обратной связью, может обеспечить стабильную скорость вращения в широком диапазоне колебаний момента нагрузки. В то же время, меняя значение установленного числа оборотов, можно регулировать номинальное значение стабилизированной скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2365025C1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1988 |
|
SU1713038A1 |
| Вентильный электропривод | 1989 |
|
SU1758822A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Устройство для реверсивного бесщеточного возбуждения синхронной машины | 1986 |
|
SU1403335A2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Электропривод | 1983 |
|
SU1343535A1 |
| Электропривод | 1980 |
|
SU1059647A2 |
Изобретение относится к бесколлекторным двигателям постоянного тока. Технический результат заключается в разработке схемы автоматического управления бесколлекторным двигателем, обеспечивающей режимы перестраиваемой стабилизированной скорости вращения двигателя и устойчивую его работу при запуске и колебаниях нагрузочного момента. Поставленная цель достигается тем, что в устройство автоматического управления двигателем, содержащее датчик положения ротора, регулятор длительности импульсов, электронный коммутатор и цепь обратной связи, в цепь обратной связи введены схема сравнения, формирователь напряжения установки, регулятор глубины обратной связи и интегратор, а выходы цепи обратной связи подсоединены к входам введенных в регулятор длительности импульсов компараторов, выходы которых через детекторы подключены к входам электронного коммутатора якорных обмоток двигателя. 4 ил.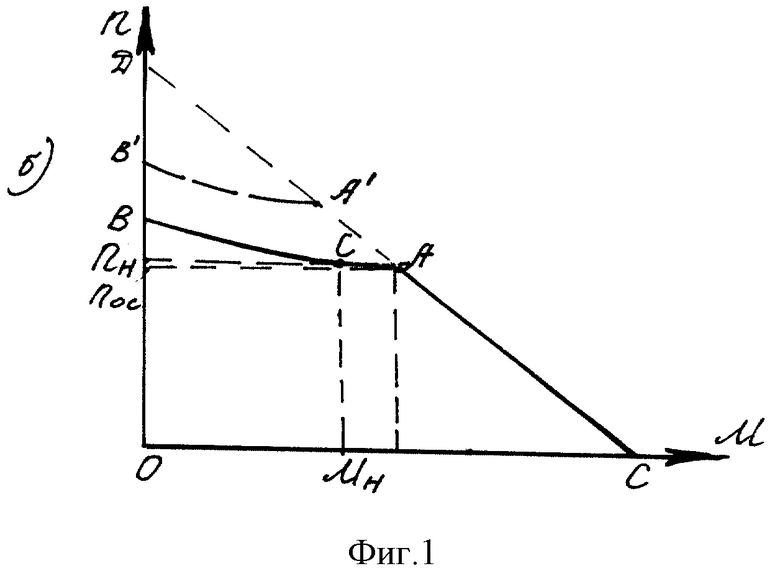
Устройство автоматического управления бесколлекторным двигателем постоянного тока, содержащее датчик положения ротора, регуляторы длительности импульсов по числу якорных обмоток двигателя, электронный коммутатор и цепь обратной связи, содержащая схему формирования сигнала по скорости, отличающееся тем, что в цепь обратной связи дополнительно введены схема сравнения, формирователь напряжения, определяющего порог срабатывания компаратора схемы сравнения, регулятор глубины обратной связи и интегратор, а каждый регулятор длительности импульсов выполнен в виде двух управляемых компараторов, детектора с обратновключенным диодом и детектора с прямовключенным диодом, причем вход схемы формирования сигнала по скорости подключен к одному из 'выходов регулятора длительности импульсов, а ее выход подключен к первому входу схемы сравнения, второй вход схемы сравнения подключен к первому выходу формирователя напряжения, определяющего порог срабатывания компаратора схемы сравнения, выход схемы сравнения подключен к первому входу регулятора глубины обратной связи, второй вход которого подключен ко второму входу формирователя напряжения, определяющего порог срабатывания компаратора схемы сравнения, выходы которого подключаются к внешним источникам установочного напряжения, выход регулятора глубины обратной связи через интегратор и резисторы подключен к первому входу второго управляемого компаратора и ко второму входу первого управляемого компаратора каждого регулятора длительности импульсов, при этом каждый из выходов датчика положения ротора, выполненного в виде датчика угла, через резисторы подключен к первым входам первого и второго компараторов соответствующего регулятора длительности импульсов, второй вход второго управляемого компаратора каждого регулятора длительности импульсов подключен к общей шине устройства автоматического управления, выход первого управляемого компаратора каждого регулятора длительности импульсов через детекторы с обратновключенными диодами подключены к соответствующим первым входам электронного коммутатора, выход второго управляемого компаратора каждого регулятора длительности импульсов через детекторы с прямовключенными диодами подключены ко вторым входам электронного коммутатора, выходы электронного коммутатора подключены к входам соответствующих якорных обмоток бесколлекторного двигателя, а вторые входы якорных обмоток объединены и подключены к общей шине устройства автоматического управления двигателем.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 0 |
|
SU256038A1 |
| SU 1748607 A3, 27.04.1998 | |||
| ТРАНСФОРМАТОР | 1995 |
|
RU2087968C1 |
| Устройство управления - фазным бесконтактным двигателем постоянного тока | 1978 |
|
SU782070A1 |
| II | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Крутильный аппарат | 1922 |
|
SU234A1 |
