Изобретение относится к элект-, ротехнике, в частности к устройствам для управления синхронными машинами, и может быть использовано в регулируемом, электроприводе.
Известен преобразователь коорДинат для электропривода с синхронной машиной, содержащий два установленных на роторе машины бесконтактных сельсина, однофазные обмотки которых; подключены к модулятору, демодуляторы, множительные элементы и сумматрры 1 .
К недостаткам известного преобраэрвателя.координат можно отнести его сложность вследствие наличия боль-шого количества множительных и суммирующих элементов.
Наиболее близким техническим решением к предлагаемому является преобразователь координат для электропривода с синхронной машиной, содержащий два установленных на роторе машины бесконтактных сельсина, два модулятора, питающие однофазные обмотки сельсинов, три сумматора двух сигналов и демодуляторы. Выходные напряжения трехфазных обмоток сельсинов демодулируются шестью демодуляторами и затем суммируются пофазно,
сумматорами. Выходы сумматоров являются выходами преобразователя координат .
К недостаткам известного преобразователя координат можно отнести его сложность вследствие большого количества демодуляторов.
Цель изобретения - упрощение пре10образователя координат путем уменьшения количества демодуляторов.
Поставленная цель достигается тем, что в преобразователе координат, содержащем два бесконтактных сельси15на с однофазньлми первичными и трехфазными вторичными обмотками, предназначенных для установки на валу ротора синхройной машины электропривода, два модулятора, выход каждого
20 из которых подключен к первичной однофазной обмотке соответствующего бесконтактного сельсина, три сумматора и демодуляторы, выводы одноименных фаз вторичных обмоток сель25синов подключены к входам соответствующего сумматора, а выход каждого сумматора соединен с входом одного из демодуляторов.
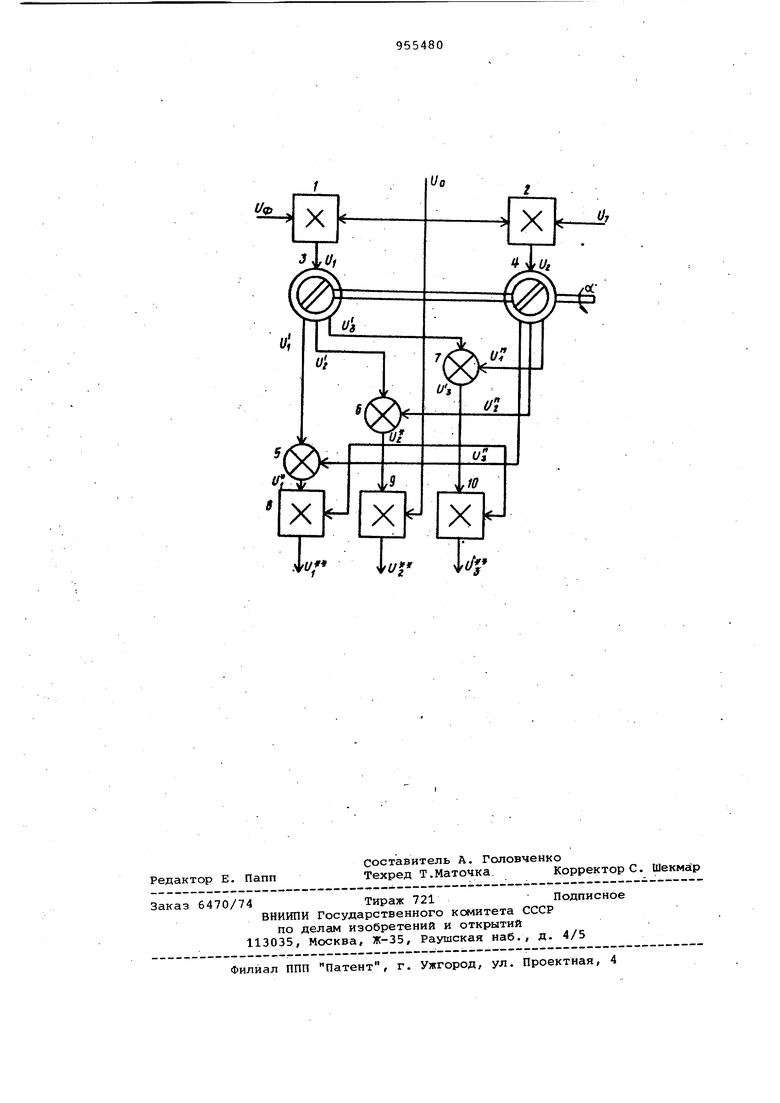
На чертеже представлена структур30ная схема преобразователя координат. Преобразователь координат содержит модуляторы 1 и 2,выходы которых -подключены к однофазным обмоткам бесконтактных сельсинов 3 и 4, Роторы сельсинов жестко соединены между собой и уЛанавливаются на валу ротора синхронной машины электропривода. Выходы одноименных фаз вторичных обмоток сельсинов соединены пофазно с входами сумматоров 5-7. Выходы сумматоров подключены к входам демодуляторов 8-10. Выходы демодуляторов являются выходами преобразователя координат. Преобразователь координат работае следующим образом. . Сигнси1дд упрйвле)зия и ,U л. ngступающие на входы модуляторов, модулируются напряжением U|j частоты cj и амплитуды Ug. На выходах модуляторов имеем . и и sign sin tOgt; Uj .U.Uo sign sin Wpt. Роторы сельсинов связаны с ротор синхронной.машины. Оси роторов и ст торов сельсинов ориентированы таким образом, что напряжения UJ, и U , снимаемые с трехфазных вторичных об ток сельсинов, равны и; U.UflSign sincoot cos С +(n-1) Un U(),Uosign sin Wot sin (96 +(n-1)где n - 1,2,3 - порядковый номер} « - угол поворота ротор синхронной машины. С выходов сумматоров снимаются н пряжения Uti Ug sign sihcOet(Uj cos (ot . (n-l)-ij + sin (A +(n-1) Напряжения U n демодулируются напряжением Uo . Ha выходах демодуляторов имеем . 2 Ur. Uj cos(ot -«-(n-l)-) + -t- U( sin(ot -t-fn-l)--) Предлагаемый преобразователь координат содержит на три демодулятора меньше, чем известный ранее, таким образом схема преобразователя координат значительно проще. Формула изобретения Преобразователь координат для электропривода с синхронной машиной,содержащий два бесконтактных сельсина с однофазными первичными и трехфазными вторичными обмотками, предназначенных для установки на вал ротора синхронной машины электропривода, два модулятора , выход.каждого из которых подключён к однофазной первичной обмотке соответствующего бесконтактного, сельсина, три сумматора и демодуляторы, отличающийся тем, что, с целью упрощения, выводы одноименных фаз вторичных обмоток ..указанных сельсинов подключены к входам соответствующего сумматора, а выход каждого сумматора соединен с входом одного из демодуляторов. Источники информации, П ринятые во внимание при экспертизе Т. Спежановский О.В. и др. Техническая направленность разработок частотно-регулируемых тихоходных синхронных электроприводов большой мощности. - Eiectrotechn. obzor, 1975, 64, cis. 5. 2. Разработка ряда комплектных тихоходных электроприводов переменного тока с тиристорными преобразователями частоты с низкочастотными, двигателями. Отчет, Гос;регистрации 73057861, 1976, № рег.ВНТИ U,тра Б 631191.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления синхронной машиной | 1980 |
|
SU888322A1 |
| Вентильный электродвигатель | 1979 |
|
SU832668A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Электропривод с синхронным двигателем | 1974 |
|
SU658690A1 |
| Устройство для дистанционной передачи углового перемещения | 1984 |
|
SU1275511A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354036C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404504C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455748C1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |