Изобретение относится к электротехнике, а именно к электроприводам и системам автоматического управления, и может быть использовано в механиз1мах с широким диапазоном скорости.
Известен электропривод, содержащий синхронный исполнительный электродвигатель, датчик угла, усилители тока и демодуляторы, в котором токи в фазных якорных обмотках исполнительного электродвигателя формируются с помощью датчика угла в зависимости от углового положения вала, и где частота задается не извне, а определяется вращением вала 1}.
Недостатком этого электропривода является то, что при его использовании в качестве следящего скорюстного привода необходимо наличие датчика скорости - тахогенератора.
Наиболее близким к предлагаемому является следящий электропривод, . содержащий синхронный исполнительный электродвигатель, механически, сочле- ненные с ним датчик угла и тахогенератор, число фаз которых равно числу фаз исполнительного двигателя, усилители тока и демодуляторы, причем обмотка возбуждения датчика угла
подключена к генератору опорной частоты, а электродвигатель И тахогенератор возбуждаются постоянными магнитами, выходыусилителей тока соединены с фазными якорными обмотками исполнительного электродвигателя, а входы с одной стороны - с обмотками тахогенера:тора, а с другой стороны с выходами демодуляторов, перв,-2чные
10 входы которых подключены к генератору опррной частоты, а вторые (управляющие входы - к вторичным обмоткам датчика угла J 2 J.
Однако известный электропривод об15ладает сравнительно низкой точностью, обусловленной тем, что система является статической, низкими динамическими характеристиками, обусловленньми невозможностью включения кор20ректирующего устройства и большим. количеством электромашинных элементов (двигатель, датчик угла и тахогенератор/).
Цель изобретения - повышение точ25ности, улучшение дин 1мических характеристик; и улучшение массогабаритных показателей.
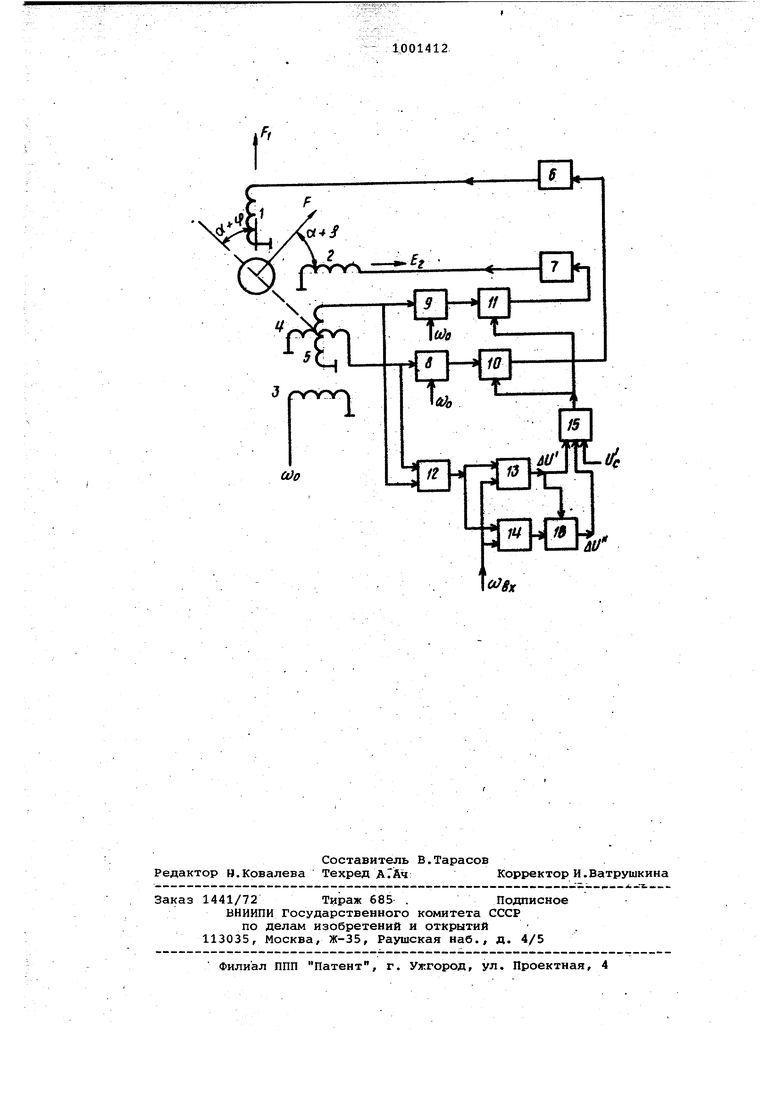
Поставленная цель достигается тем, что в безредукторный-бесконтакт30ный следящий электропривод, содержащий синхронный исполнительный электродвигатель , вал которого связан с датчиком угла, снабженным обмоткой возбуждения, подключенной к генератору опорной частоты, и вторичными обмотками с числом фаз, равным числ фаз. исполнительного электродвигател фазные якорные обмотки которого сое динаны с выходами усилителей тока, входы которых через демодуляторы св заны с соответствующими вторичными фазными обмотками датчика угла и ге нератором опорной частоты, блок задания частоты вращения, введены бло умножения в количестве, равном числу фаз электродвигателя, преобразователь напряжений, частотный и фазо вый дискриминаторы, ключ и сумматор при этом входы преобразователя напряжений соединены с вторичными обмотками датчика угла/ а выход подключен к первым входам частотного и фазового дискриминаторов, вторые, входы которых соединены с блоком задания частоты вращения, выход час тотного дискриминатора подключён к управляющему входу ключ-а и первому входу сумматора, выход фазового дис криминатора через ключ .соединен с вторым входом сумматора, выход кото рого соединен с вторыми входами умножителей , первый вход каждого из которых соединен с выходом соответствующего демодулятора,, а выход ,с задающим вхс/дом усилителя тока. На чертеже представлена функциональная схема предлагаемого устройс ва при двухфазном исполнении исполнительного синхронного электродвигателя . Устройство содержит фазные якорные обмотки 1 и 2 исполнительного синхронного электродвигателя, вал которого механически соединен с вал датчика угла, содержащего первичную 3 и вторичные 4 и 5 фазные обмотки, которые соединены с выходами усилителей тока б и 7. Первичная обмотка 3 датчика угла подключена к генератору опорной частоты V, не показан, а вторичные 4 и 5 фазные обмотки к первым входам демодуляторов 8 и 9 вторые входы которых подключены к генератору опорной частоты. Выходы демодуляторов 8 и 9 соединены с пер выми входами блоков 10 и 11 умножения, выходы которых соединены с входами усилителей б и 7 тока. Вторичные обмотки 4 и 5 датчика угла соединены также с входами преобразо вателя 12 напряжений. Выход этого преобразователя соединен с первыми входами частотного дискриминатора 1 и фазового дискриминатора 14. Выход частотного дискриминатора 13 соеди,нен с первым входом сумматора 15, а также управляющим входом ключа 16 Выход же фазового дискриминатора 14 через ключ 16 соединен с вторым входом сумматора 15. На третий вход сумматора 15 подается некоторое напряжение постоянного тока, а выход соединен с вторыми входами б.локов 10 и 11 умножения. Электропривод работает следующим образом. На первичную обмотку 3 датчика угла поступает напряжение Ц. Цч S inOA t, о |где и амплитудное значение/ I - опорная частота модуляции. Обозначим Кг ly , К г,, ... коэффициенты пропорциональности. На вторичных обмотках 3 и 5 датчика угла формируются напряжения U4 K sintt t sin(oL+ У), U Ч s in(4/ot cos ,(ot+Т J, где cL - электрический угол поворота магнитной оси ро-гора Синдуктора) электродвигателя относительно оси обмотки 1; - начальная фаза положения ротора, выраженная в электрических углах. На выходах демодуляторов 8 и 9 имеем-напряжения U-Q i п о. + f ), Год К,, cos (об + If ). Напряжения иg и Up поступают на первые входы блоков 10 и 11 умножения, на вторые входы которых поступает сумма сигнала рассогласования ди, процесс формирования которого будет рассмотрен ниже, и некоторого постоянного сигнала l, Эти сигналы выражены в. виде напряжения постоянного тока. На выходах блоков 10 и 11 умножения имеем напряжения ,Ki(AU + Uc)sinU +1 ) , К(дО + U)cos(o ). Напряжения U, поступают на входаа усилителей 6 и 7 тока.Усилитель тока - это устройство, на выходе которого формируется ток, пропорциональный входному напряжению, независимо от величины нагрузки. Выходные токи усилителей тока, т.е. токи обмоток 1 и 2 электродвигателя представляются следующими формулами: 1 К( д.и + Uc;)(al + }, 1 К4;{ ди + Uc)cos( + ) , I Намагничивающие F F силы обмоток 1 и 2 пропорциональны токам ). И IT./ поэтому FI K -CulT + 40si.n(ai +V ) , KpChU + Uc,)cos(ftl + V ). Если ввести в рассмотрение комплексную плоскость, ось действител ных чисел которой совмещена с осью обмотки 2, а ось .мнимых чисел с осью обмотки 1, то результирующа намагничивающая сила статора ( якор i электродвигателя представится в следующем виде: ( -- VJr 5( ( sin (ы+) , где iCj ()F модуль ( величи на JI комплексного числа, а о1 аргумент (угол,.составляемый векто ром FJ,- действительных чисел Таким образом, магнитная ось индуктора | poтopa составляет с ос обмотки 1 угол . cf. + f и этот же уго имеется между результирующей намаг чивающей силой и осью обмотки 2. Cj довательно магнитная ось индуктора и результирующая намагничивающая си ла взаимоперпендикулярны (независимо от величины угла . В таких условиях крутящий момент двигателя при постоянстве магнитного потока возбуждения равен М к (ди + 1)., т.е. момент пропорционален сумме рассогласованиями и постоянного сигнала Ц.. Рассмотрим процесс формирования сигнала рассогласования; ли. Сигнал рассогласования состоит из двух составляющих ди-лиЧй.и гдеДи - сигнал, пропорциональный -отклонению скорости вращения валаот заданного знаIJ чения, UU - сигнал, пропорциональный .отклонению угла от заданного значения. Сигнал д и формируется следую щим образом. На выходе преобразователя 12 напряжений имеем напряжение U -KgVw (a)ot+o()-K,sih (;а;о-«-К9 VCg6iM(UJo + Cl))i, где 51 - угловай частота вращения Вала; электрическая скорость вращения вала;/ К- - коэффициент, который равен отношению электрического угла поворота, к геометрическому. . Для обычных синхронных машин Кя равен числу пар полюсов, для синхро но-рвдукторных машин - коэффициенту электромагнитной редукции. Преобразователь 12 напряжений работает следующим образом. Напряжение обмотки 4 суммируется с напряжением обмотки 5, сдвинутымна t/i. в результате такого сложения получаем напряжение о неизменяемой амплитудой, фаза которого пропорцио-. нальна фазе поворота вала. Напряжение и поступает на первый вход частотного дискриминатора (fпреобразователя разности частот в нап1 яжение постоянного тока), на второй вход которого поступает входное высокочастотное напряжение siKCu xififg V iUiKv-U 6Х- ВХ W где а1иплитуда; а;. - частота; /вх- Фзза входного сигнала. На выходе частотного дискриминатора 13 имеем напряжение постоянного тока, пропорциональное рассогласованию по скорости, Ц,,-йи-К jw - )(%х-iVo- fi), это напряжение является управляющим, сигналом, поэтому из :условия ди О получаем Л О , . . бхис « Ы.о fil-y c No. 9 Сигнал д и формируется следующим образом. Выходные напряжения преобразователя 12 напряжений помимо частотного дискриминатора поступают также на первый вход фазового дискриминатора (преобразователя разности фаз в напряжение постоянного тока), на второй вход которого поступает входной сигнал .Ору. На выходе фазового дискриминатора получаем напряжение постоянного тока, пропорциональное рассогласованию по фазе входного сигнала и положения рртрра ,(i,g-v). Сигналы &UH ли на первый и второй входы сумматора 15, причем сигнал ди поступает непосредственно, а сигнал ли через ключ 16, который .управляется выходн1лл сигналом и, т.е. ключ 16 включается после достижения сигнала Д и до определенного порогового значения, соответствующего равенству .( На .третий вход сумматора 15 поступает некоторый постоянный сигнал, назначднием которого .является создание момента двигателя,равного статистичедому моменту нагрузки. Выходное напряжение сумматора 1,5 поступает на вторые ( управляющие) входы блоков 10 и 11 умножений. Т&ким образом, динамический момен двигателя возникает при наличии рассогласования по скорости и по фазе, поэтому ротор электродвигателя враmaetCH синхронно относительно входного сигнала и система является астатической. В том случае, если не требуется большой точности, с целью упрощения схемы привода, фазовый дискриминатор 14 и ключ 16 могут быть исключены. Применение предлагаемого устройс ва повышает точность привода и исгключает измерительную электрическую машину тахогенератора , г5Ьтоимость которого намного выше стоимости электронных блоков 12, 13, 14 и 1б. Особенно эффективен электропривод при использовании в нем синхронноредукторного исполнительногб электродвигателя и индукционного редуктосина 1 бесконтактного датчика угла ).. Формула изобретения Безредукторный бесконтактный сле дящий электропривод, содерксащий син хронный исполнительный электродвигатель, вал которого связан с Датчиком угла, снабженный обмоткой воз буждения ,.подключенный к генератор опорной частоты, и вторичными обмот ками с числом фаз, равным числу фаз исполнительного электродвигателя, фазные якорные обмотки которого сое динены с выходами усилителей тока, входы которых через демодуляторы связаны с соответ.ствующими вторичными фазными обмотками датчика угла и генератором опорной частоты, блок задания частоты вращения, о т л и чающийся тем, что, с целью повышения точности, улучшения динамических характеристик и улучшения малогабаритных показателей, в него введены блоки умножения в количестве, равном числу фаз исполнител ьного электродвигателя, преобразователь напряжений, частотный и фазовый дискриминаторы, ключ и сумматор, входы преобразователя напряжений соединены с вторичными обмотками датчика угла, а выход подключен к первым входам частотного и .фазового дискриминато ров, вторые входы которых соединены с блоком задания частоты вращения, выход частотного дискриминатора подключен к управляющему входу ключа и первому входу сумматора, второй вход которого через ключ связан с выходом фазового дискриминатора, выход сумматора соединен с вторыми входами блоков умножения первый вход кавдого из которых соединен с выходом соответствующего демодулятора, а выход - с задающим входом усилителя тока. Источники информации, принятые во внимание при экспертизе 1. Бродавский В.Н., Иванов Е.С. Приводы с частотно-TOKOBfcjM управлением. М., Энергия, 1974, с, 23. 2. Авторское свидетельство СССР № 433447, кл. Н 02 Р 5/28, 1973.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1656652A1 |
| Электропривод | 1987 |
|
SU1453569A1 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |