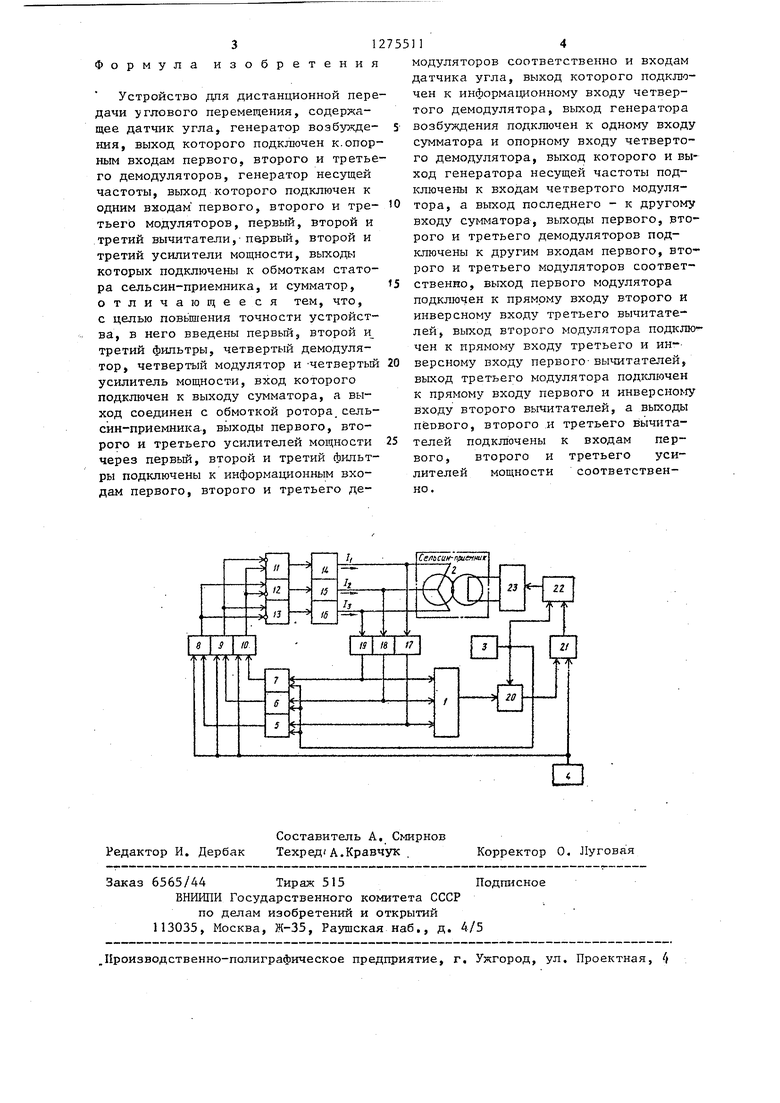
i1 Изобретение относится к автоматике и может быть использовано в системах автоматического управления объектами. Цель изобретения - повышение точности устройства. На чертеже представлена структурная схема устройства. Устройство содержит датчик 1 угла сельсин-приемник 2, генератор 3 возбуждения, генератор 4 несущей частоты, первый 5, второй 6 и третий 7 де модуляторы, первый 8, второй 9 и тре тий 10 модуляторы, первьй 1.1, второй 12 и третий 13 вычитатели, первый 14 второй 15 и третий 16 усилители мощности, первый 17, второй 18 и третий 19 фильтры, четвертый демодулятор 20 четвертый модулятор 21, сумматор 22 и четвертый усилитель 23 мощности. Устройство предназначено для рабо ты с контактным и бесконтактным сель син-приемником , Однако при работе с контактным сельсин-приемником генератор 4 и модуляторы 8 - 10 и 21 могут быть исключены. При этом устройство работает следующим образом . На обмотку ротора сельсин-приемника 2 с выхода усилителя 23 поступает синусоидальное напряжение емпли тудой и и частотой oJ, а с выходов усилителей 14 - 16 На обмотки статора сельсин-приемника 2 поступают токи I , 1 и I , В результате на 06мотках сельсин-приемника 2 формируются следующие напряжения: tl sinolsinu t+l, R; (+120 )sin«ib+I,nR; (oL-120°)sinuJt+I R, где oL- угол поворота сельсин-приемника 2j В - сопротивление обмото сельсин-приемника 2, На выходах фильтров 17 - 19 выделяются переменные составляющие напряженийЦ, (dL-120° ) sin)t; U,g U,,sin(pl+l20 ) n Чп itsinu fc. В демодуляторах 5-7 выделяются огибающие выходных- сигналов фильтров 17 - 19, (dL-120); (dL+120); Ug u sind; На выходах вычитателей fl - 13 формируются следующие сигналы: 12 и„ (oL-120.)-sin(ct+120 J -0и„соз.; Ц2 UrT,fsin,-sin(ol-120 ) -/JUr«cos +120°); и,з (oL+ 120Vsin((j -/3u cos(of-120°). Усилители 14 - 16, охваченные Обратной связью по току, создают в обмотках статора сельсин-приемника 2 токи I, Tj,cosot; (d+120°); 1з 1осоз(л-120°). , Вектор суммарного поля, создаваемого этими токами, перпендикулярен статору, и при возникновении в статоре постоянного тока создается момент вращения сельсина, .На выход датчика 1 угла поступают сигналы с фильтров 17 - 19. На выходе датчика 1 сигнал равен и, 5 д ot sin)fc, где uct - угол рассогласования сель син-приемника 2 и датчика 1 угла. После демодулятора 20 сигнал постоянного напряжения, оп1ределяемый углом До1 рассогласования, поступает на. вход усилителя 23 мощности. Через обмотку ротора сельсин-приемника 2 начинает протекать постоянный ток, который, взаимодействуя с постоянными токами обмоток статора, создает момент, приводящий сельсин-приемник 2 . в согласованное положение. Точность передачи угла в предлагаемом устройстве определяется погрешностью изготовления сельсина и составляет и+ 0,7°. При использовании бесконтактного сельсин-приемника 2 работа на постоянном токе невозможна и приходится вводить модуляцию токов статора и ротора на частоте и) с помощью генератора 4 и модуляторов 8- 10 .: Если не требуется значительных согласующих моментов и при наличии сточника питания со средней точкой, ожно одну из обмоток статора сельсин-приемника 3 соединить со средней точкой источника и упростить устройство, исключив соответствующие усиитель мощности, демодулятор, фильтр модулятор. Максимальный согласуюий момент при этом уменьшается в /J аз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Устройство для передачи угла поворота вала | 1982 |
|
SU1042059A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА | 2012 |
|
RU2492419C1 |
| Следящая система | 1981 |
|
SU999016A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
Изобретение относится к области автоматики и может быть использовано в системах автоматического управле- . ния объектами. С целью повьшения точности в устройство, содержащее датчик угла, сельсин-приемник, генератор возбуждения, генератор несущей частоты, первый, второй и третий демодуляторы, первый, второй и третий модуляторы, первый, второй и третий вычитатели, первый, второй и третий усилители мощности, сумматор, введены первый, второй и третий фильтры, четвертый демодулятор, четвертый модулятор и четвертый усилитель мощности. Выходной сигнал последнего поступает в обмотку ротора сельсинприемника. В обмотках статора сельсин-приемника возникают сигналы переменного тока, которые через соответствующие фильтры поступают на входы датчика угла. В датчике угла возникает сигнал, пропорциональный углу рассогласования между сельсин-приемником и датчиком угла. Этот сигнал через четвертый демодулятор, четвертый модулятор, сумматор и четвертый усилитель мощности поступает в обмотку ротора сельсин-приемника. Кроме того, выходные сигналы фильтров через первый, второй, третий демодуляторы, первый, второй, третий модуё ляторы поступают попарно на входы сл вычитателей, где формируются косинусные напряжения, которые в первом, втором и третьем усилителях мощности преобразуются в токи, поступаюг те в обмотки статора сельсин-приемника. Вектор сумматорного поля, создаваею сд мого этими токами, перпендикулярен статору и, взаимодействуя с током ротора, пропорциональным углу рассогласования, создает момент, приQ1 водящий сельсин-приемник в согласованное положение. 1 ил.
| Устройство для дистанционной передачи угловых перемещений | 1981 |
|
SU964695A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для дистанционной передачи углового перемещения | 1981 |
|
SU1001148A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
