Изобретение относится к медицинской технике, а именно к устройствам , для моделирования вывихов в суставе Лисфранка и определения прочности связочного аппарата суставов стопы.
Известно устройсзгво для моделирования вывихов стопы, которое содержит стационарный и подвижный упоры 1.
Однако известное устройство не позволяет моделировать вывихи стопы в различных плоскостях и количественно определять усилие, необходимое для возникновения вывиха и обусловленное прочностью связочного аппарата стопы. Указанные недостатки ограничивают область использования устройства.
Цель изобретения - моделирование вывихов стопы в различных плоскостях с одновременным определением усилия.
Поставленная цель .достигается тем, что в устройстве для моделирования вывихов стопы, содержащем упоры, один из упоров выполнен в виде корпуса, включающего пластины, соединенные болтами, другой упор выполнен . в виде скобы, концы которой связаны винтом, причем скоба соединена с корпусом-с помощью фигурного кронштейна и троса, последний присоединен к динамометру.
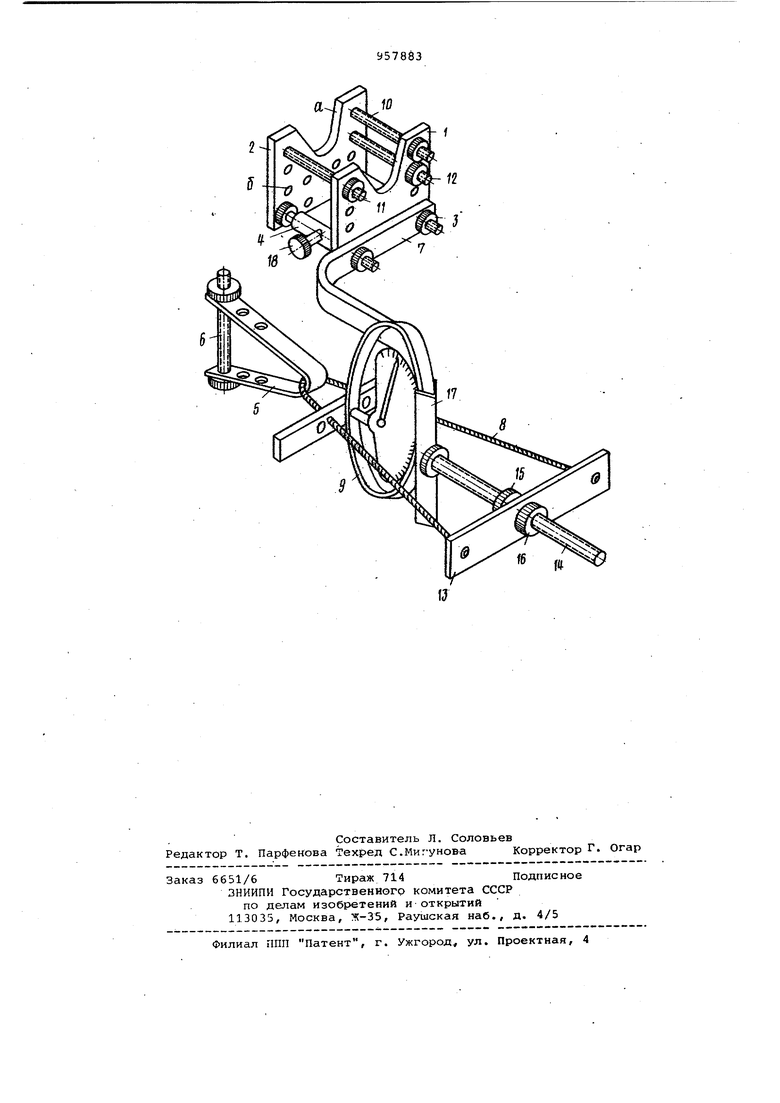
На чертеже изображено устройство для моделирования вывихов стопы, вид.
Устройство содержит упоры, один из которых выполнен в виде корпуса, составленного из пластин 1 и 2, соединенных болтами 3 с втулкой 4, дру10гой упор выполнен в виде скобы 5, концы которой связаны винтом 6. Скоба 5 связана с корпусом с помощью фигурного кронштейна 7 и троса 8, присоединенного .к динамометру 9.
15
В пластинах 1 и 2 выполнены фигурйые вырезы а и отверстия б под винты 10 и 11 и штифт 12. Концы, троса.8 жестко соединены с планкой 13, через которую проходит винтовой стержень
20 14 с гайками 15 и 16. Упорная площадка 17 стержня 14 взаимодействует с динамометром 9, at втулка 4 снабжена винтом. 18.
Устрсйство работает следующим об25разом.
Отсепарировывают кожу и подкожную клетчатку тыльной, внутренней и наружной поверхности стопы трупа от уровня голеностопного сустава до го30ловок плюсневых костей. Отпустив предварительно гайки и контргайки болтов 3, прикладывают устройство к стопе так, что задний отдел стопы располагается между пластинами 1 И2, а их вырезы а - под лодыжками, в отверстия 6 пластин по задней и передней поверхности сто№1 непосредственно над кожей вводят винты 10 и 11. Вращением гаек и контр гаек болтов 3, винтов 10 и 11 достигается жесткая фиксация заднего отдела стопы. Кроме того, фиксация дополняется введением штифта 12, непосредственно через одно из отверстий 5 пластин, корпуса в таранную кость. К болтам 3 фиксируют фигурный кронштейн 7. На уровне головок плюсневых костей к Кронштейну 7 крепят динамометр 9. Передний отдел стопы помещают в просвет скобы 5, после чего в скобу устанавливают винт 6. Отпускают гайку 16 и путем вращения гайки 15 перемещают стержень 14 через отверстие планки 13. Возникающее при этом усилие регистрируется динамометром 9 и передается одновременно посредством троса 8 и скобы 5 на передний отдел стопы. Усилие, необходимое для возни кновения вывиха и разрыва связочного аппарата сустава Лисфранка, опрекеуя ется по динамометру. Для изучения ме ханизма вывиха в противоположном направлении кронштейн 7 с расположенными на нем узлами крепят аналогично к болтам 3 с противоположной стороны Для моделирования изолированных вывихов плюсневых костей в суставе Лисфранка винт б скобы 5 проводят че рез соответствующий межплюсневый про межуток в.тыльно-подошвенном направлении. Моделирование подошвенных вывихов выполняют следующим образом. Кронштейн 7 посредством винтов 18 крепят к втулкам 4, расположенным на болтах 3. Передний отдел стопы размещают в просвете скобы 5 таким образом, что винт 6 скобы проводится через отверстия скобы непосредственно над тыльной поверхностью стопы. Усилие на передний отдел стопы передается и регистрируется аналогичным образом. Таким образом, описываемое устройство позволяет моделировать вывихи стопы в различных плоскостях с одновременным определением усилия, необходимого для возникновения вывиха. Формула изобретения Устройство для моделирования вывихов стопы, содержащее упоры, о тли чающееся тем, что, с целью моделирования вывихов стопы в различных плоскостях с одновременным определением необходимого усилия, один из упоров выполнен в виде корпуса, включающего пластины, соединенные болтами, другой упор выполнен в виде скобы, концы которой связаны винтом, причем скоба соединена с корпусом с помощью фигурного кронштейна и троса, а последний присоединен к динамометру. . Источники информации. Принятые во внимание при экспертизе 1. Wiley J. Ji The mechinism of tarsometatarsal dislocations.. J. Bone. It. Surg, 1971, 53 В 3, с. 474-482.