(54) ЦИФРОВАЯ СИСТЕМА АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИИ ВЕСА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система автоматической регистрации веса | 1983 |
|
SU1081426A1 |
| Цифровое весоизмерительное устройство | 1985 |
|
SU1276914A1 |
| Автоматические весы | 1986 |
|
SU1364892A1 |
| Цифровая система автоматической регистрации веса | 1986 |
|
SU1434269A2 |
| Устройство уравновешивания весов | 1991 |
|
SU1778546A1 |
| Устройство для цифровой регистрации веса | 1982 |
|
SU1037080A1 |
| Электронные цифровые весы | 1980 |
|
SU943533A1 |
| Цифровые электромагнитные весы | 1989 |
|
SU1631305A1 |
| Устройство цифровой регистрации веса | 1979 |
|
SU830134A1 |
| Электронные цифровые весы | 1980 |
|
SU932260A1 |
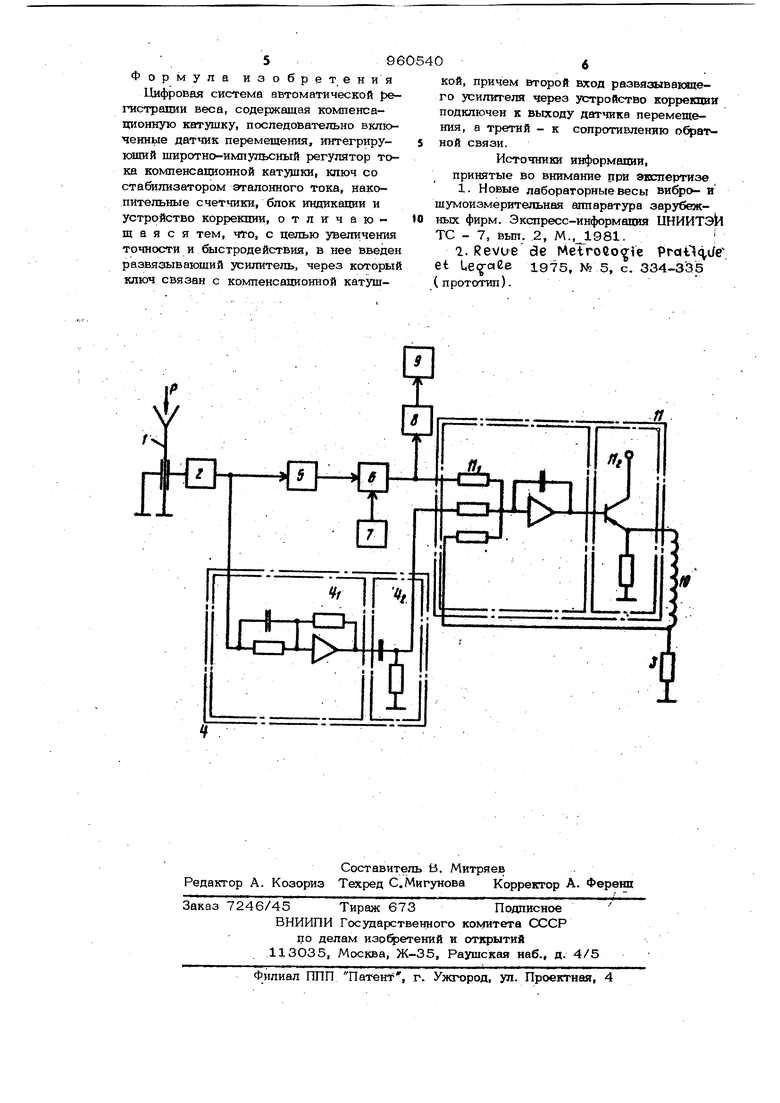
Изобретение отнЬсится к измерительной технике, а точнее к дифровьп элеЁтронным весоизмерительным системам-. И естнь весоизмерительные системы вспользукядие компенсацию измеряемого груза электромагнитной силой тока компенсационной катушки, т.е. работают по принципу замкнутых систеЦ автоматического регулирования; 1 . Общий, недостаток систем автоматичес кого управления заключается в том, что с увеличением бьютродействия повышаетс собЬтвенная частота систем и уменьшает ся точность, так как растет влияние внешних и внутренних электрических no-i м.ех и вибраций основания на результаты измерений. Фильтрация помех и вибраций ведет к уменьшению собственной частоты системы и, следовательно, к уменьшению быстродействия., Наиболее близкой по технической сущности является цифровая система автома.тической регистрации веса, содержащая компенсационную катушку; последовательно включенные датчик перемещения, интегрирующий шкротно-импупьсный регулятор тока Компенсационной катушки, ключ со стабилизатором эталонного тока, накопительные счетчики, блок индикации и устройство коррекции 2 . Недостатки известного решения заклк чаются в следующем. Система автоматического управления аналога Должна обладать устойчивостью в широком диапазоне изменения коэффициента усиления. Несмотря на наличие интегратора, в установившемся режиме (при малом коэффициенте усиления) система имеет статическую ошибку и не . приводит в нулевое положение датчик перемешения. Это ш,1зь1вает появление погрешностей от неравномерности магнитного -поля компенсационной катушки, от влияния пружин подвеса и в целом ведет к неравномерности шкалы прибора. Кроме; того, известно, что система с переменным коэффициентом усиления может иметь параметрические колебания, т.е. терять устойчивость. Цель изофетения - увеличение точности и быстродействия. Для достижения поставленной цели введен развязывающий усилитель, через который ключ связан с компенсационной катушкой, причем второй вход развязывающего усилителя через устройство кор рекции подключен к выходу датчика перемещения, а третий - к сопротивлению обратной связи. На чертеже показана предлагаемая цифровая система. Система содержит подвижное грузоподъемное устройство 1, датчик 2 перемещения.; грузоприбмного устройства; сопротивление 3 обратной связи, устрой- ство 4 .коррекции, интегрирующий щи, ротно-импульсный регулятор 5 тока ком пенсационной катушки, ключ 6 широтноимпульснрго регулятора, стабилизатор .,. 7 эталонного тока, накопительные счетчики 8, индикацию 9, компенсационную катушку 10, развязывающий, усилитель 1 .В статике подвижное грузоподъемное устройство 1 с грузом Р уравновешивается электромагнитной силой F , создава емой током 3 коктенсационной катушки 10. При изменении груза Р подвижное грузоприемное устройство 1 перемещаетс и сигнал 2 датчика перемещения грузо.приемйого устройства 1 с помощью интегрирующего широтно-импульсного регулятора 5 тока компенсационной катушк 10 изменяет длительность заМЬ1кания ключа широтно-импульсного регулятора 6 так, что под действием изменения среднего тока компенса1гаонной катушки Ю подвижное грузоприемное устройство 1 возвращается в исходное уравновешенное положение. Широтно-модулированный сигнал ключа щиротно-импульсного регулятора 6 преобразуется в ток индикации 9 с помощью накопительных счетчиков 8 широтно-модулированных сигналов Для увеличения точности измерения слу.жит стабилизатор 7 эталонного тока. С. целью повышения быстродействия предлагаемой системъ при сохранении высокой точности измерения в отличие от известной используется устройство параллельного типа. Параллельная коррек ция 4 содержит диф()еренцирующий усилитель и разделительный конденсатор . Таким офазом, переменная составляюща сигнала коррекции поступает на развязы вающий усилитель 1 1 и далее в компенсационную катушку 10, не влияя непост редственно на результат измерений, ко- . торый формируется с выхода ключа широтно-импульсного регулятора 6 с помощью накопительных счетчиков 8. Развязыва- с ющий усилитель 11 служит для согласования низкоомной индуктивной нагрузки (кокшенсационной катушки 10) с ключом широтно-импульсного регулятора 6, а также для усреднения пульсаций тока компенсационной катушки 10. Развязывающий ycHtaTehb 11 содержит дополнительный интегратор и эмиттерный повторитель, охваченные отрйцаФелйной обратной связью по тоду компенсационной катушки . 1О, т.е. предста ёляет собой инерционное звено, в котором небольшая емкость инTerpgTppa позволяет устранить пульсации компенсейхионного тока . В вьшускаемых за.., рубежом весах , (например, РТ 1200 фирмы и др.) реализуется последовательная коррекция, при которой в закон регулирования вводится первая и вторая производная. В цифровой системе, пример вьшолнения которой приведен на чертеже, передаточная функция всего регулятора в идеальном случае, без учета малых постоянных времени, имеет вид (Р} где Кд - коэффициент передачи интегрирующего широтно-импульсного регулятора 5; Кд- статический коэффициент усиления дифференцирующего усилителя;Тд- постоянная времени дифференцирующего усилителя. Из передаточной функции следует, что предлагаемый закон регулирования также содержит первую и вторую производные. Вместе с тем предлагаемый способ коррекции позволяет выбрать большую постоянную времени интегратора (малый К) широтно-импульсного модулятора и снизить уровень помех в отсчете показаний, сохранив при этом высокий коэффициент усиления по переменной составляющей коррекции. Предлагаемая система автоматического уравновешивания позволяет повысить .точность измерения при одинаковом уровне внешних и внутренних электрических помех примерно в 2 раза. 596 Формула изобретения Цифровая с1ястема автоматической регистрации веса, содержащая компенсационную катушку, последовательно включенные датчик перемещения, интегрируюший щиротно-импупьсный регулятор тока компенсационной катущки, ключ со стабилизатором эталонного тока, накопительные счетчики, блок индикации и устройство коррекции, отличающ а я с я тем, ч1го, с целью увеличения точности и быстродействия, в нее введен развязывающий усилитель, через который ключ связан с компенсационной катуш0кой, причем второй вход развязывающего усилителя через устройство коррекции подключен к выходу датчика перемещения, а третий - к сопротивлению обратной связи. Источники информации, принятые во внимание при экспертизе 1. Новые лабораторные весы вибро- и шумоизмерительная аппаратура зарубежньк фирм. Экспресс-информация ЦНИИТЭЙ ТС - 7, вып. 2, М.,1981. 1. Revue de MetroCo ie ( et 1975, f 5, с. 334-335 (прототип).
