4
оэ
а
: Изобретение относится к нэмери- :тельной технике и может быть исполь- |зовано в цифровых электронных устрой ствах для измерения массы груза.
Цель изобретения - повьшгение точ- ности измерения.
На фиг.1 изображена блок-схема cиcтe ЫJ на фиг.2 - структурные схемы устройства коррекции и функционального преобразователя напряжения в сопротивление.
Система содержит подвижное грузо- приемное устройство 1, датчик 2 перемещения грузоприемного устройства, интегрирующий широтно-импульспый регулятор 3 тока компенсационной катушки, уравновешивающую систему 4, ключ 5, стабилизатор 6 эталонного тока,
накопительные счетчики 7, блок 8 индикации, устройство 9 коррекции, функциональный преобразователь 10 напряжения в сопроттзление и развязывающий усилитель 11.
Интегрирующий широтно-импульсный регулятор тока 3 компенсационной ка тушки образуют интегратор 12 и широтно-импульсный модулятор (ШИМ) 13.
Уравновешивающая система 4 состои из компенсационной катушки 14 и ре- зистора 15 обратной связи, Устройство коррекции 9 содержит операционный усилитель 16j резисторы ; 17-19, конденсатор 20 и резисторный :оптрон 21.
; функциональньш преобразователь напряжения в сопротивление 10 состои из транзистора 22 и резистора 23,
Интегратор 12 содержит операционный усилитель 24, резистор 25 и кон-- денсатор 26.
Выход интегратора 12,связан через функциональный преобразователь 10 напряжения в сопротивление с резис- торным оптроном 21 устройства 9 кор-- рекцин.
Система работает следующим образом.
Сигнал с датчика 2 перемещения грузоприемного устройства 1 поступает на информационный вход устройства 9 .-.коррекции и через интегрирующий широтно-импульсньй регулятор 3 тока на управляющий вход ключа 5, коммутирующего ток стабилизатора б эталонного тока на накопительные счетчики 7, посредством которых получается результат взвешивания в цифровом В1зде и вьщается на блок 8 индикации и че
рез развязывающий усилитель 11 на уравновешиваюд(ую систему 4,, которая создает компенсирующую силу F. Местная обратная связь с вькода по току уравновешивающей системь 4 на второй вход развязывающего ус;ипит 2ля 11 служит для оглаживания пульсаций в контуре управления и повьшения точности взвешивания. Устройство 9 коррекции и функциональньй преобразователь 10 образуют цепь адаптивной коррекции. В установившемся режиме постоянная составляющая сигнала на выходе регулятора 3 пропорциональна приведенной массе га,
Передаточная функция электромеханической части системы с достаточно хорошим приближением может быть описана идеальным колебательным звеном:
WM(P)
К,
const,
м
опредепричем постоянная времени ляется выpaJкeниeм:
т F
где m приведенная масса грузоприемного устройства и Езвешивае мого грузам
с - приведенная жесткость элек тромеханической части систе™
; МЫ.
Для подавления пульсаций: на час-. тотах, близ Ких к собственной частоте электромеханической части системы; .
WM
гу I1
л - с
F 1ш
0
служит пропорционально-интегрально- ди4)ференцирующий контур, управления системь (регулятор 3 реализует интегральную составляющуюд устройство коррекЩ Ш 9 пропорциональьгуш и диф ференциальную составляющие этого контура) .
Передаточная функция контура имеет вид;
W,
Р
(р) :. , Ки-НСдУ
Д .Кд
коэффициенты передачи по ина еграпь.|1ой, про- пордионэ..пьной и дифференциальной составляв ющет-5 соответственно.
3 1
Оптимальная настройка достигается в том случае, когда нули передаточной функции контура совпадают (или достаточно близки) к полюсам передаточной функции электромеханической части системы. Это достигается при условии, что
34269
возрастает коэффициент передачи по дифференциальной и пропорциональной составляюпцм сигнала обратной связи
контура управления системы. 5
Таким образом, коэффициент передачи по дифференциальной составляющей сигнала обратной связи контура IQ управления систеь5Ы имеет ввд
К.
К-т,

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система автоматической регистрации веса | 1983 |
|
SU1081426A1 |
| Цифровая система автоматической регистрации веса | 1980 |
|
SU960540A1 |
| Электронные цифровые весы | 1980 |
|
SU943533A1 |
| Цифровые электромагнитные весы | 1989 |
|
SU1631305A1 |
| Устройство для измерения электрических величин | 1987 |
|
SU1525592A1 |
| Автоматические весы | 1986 |
|
SU1364892A1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ЗОНДИРОВАНИЯ | 2015 |
|
RU2601282C1 |
| Следящая система | 1986 |
|
SU1564589A1 |
| Весы с электромагнитным уравновешиванием | 1987 |
|
SU1552012A1 |
| Цифровое весоизмерительное устройство | 1985 |
|
SU1276914A1 |

Изобретение относится к измерительной технике и может быть использовано в цифровых электронных устройствах для измерения массы груза. Целью изобретения является увеличение точности измерения массы. Сигнал с датчика 2 перемещения подвижного гру- зоприемного устройства 1 проходит через интегрирующий широтно-импульсный регулятор 3 тока компенсационной катушки, который коммутирует с помощью ключа 5 ток, поступающий со стабилизатора 6 эталонного тока на накопительные счетчики 7. Значение измеряемой массы груза фиксируется на блоке 8 индикации. Ток с выхода ключа 5, представляющий соб{9й интегральную составляющую контура обратной связи управления системы, поступает через развязывающий усилитель на вход уравновешивающей системы 4 для создания компенсирующей силы системы. В контур обратной связи управления системы входит также местная составляющая с выхода уравновешивающей системы 4 и совокупность КЗ пропорциональной и дифференциальной составляющих с выхода корректирующего устройства 9, которая дополняется сигналом адаптивной коррекции с выхода функционального преобразователи 10 напряжения в сопротивление. 2 ил. с с: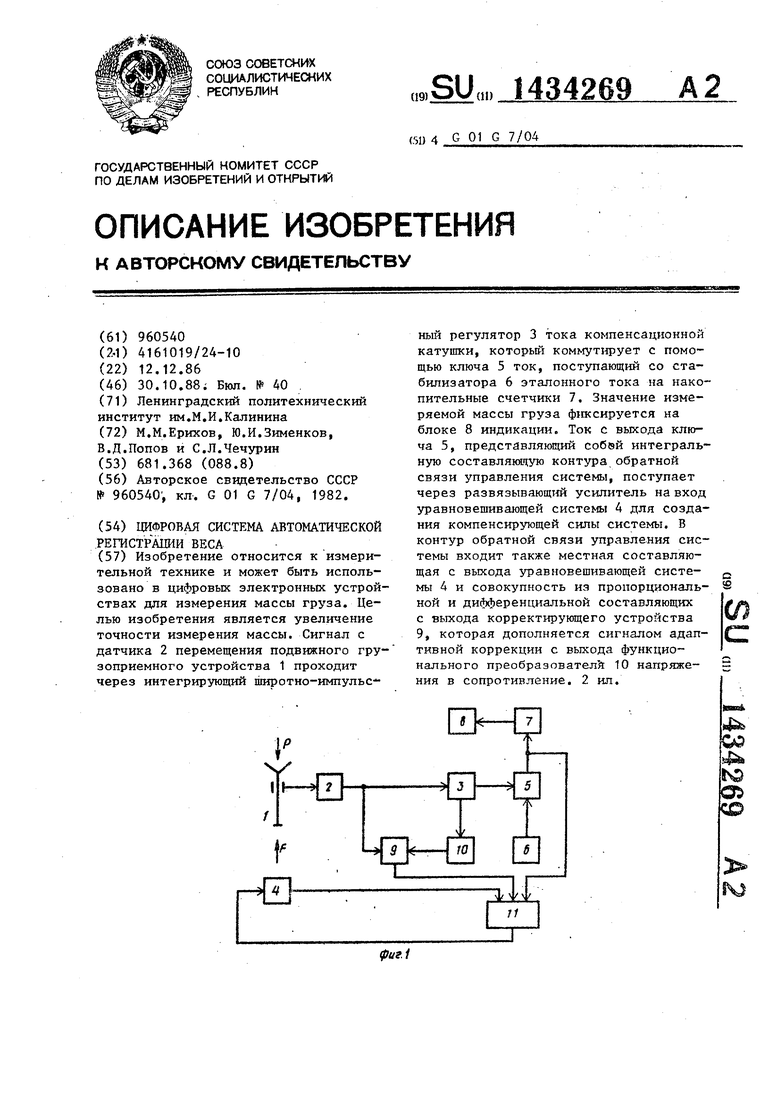
или
. К,. с
(1)
Функциональный преобразователь 10 (фиг.2) реализует пропорциональную зависимость выходного сопротивления от напряжения на входе (либо близкую зависимость).
Выходной резистор 23 функционального преобразователя 10 включен в обратную связь операционного усилителя 16, на котором реализуется операция дифференцирования в устройстве 9 коррекции .
С увеличением массы груза увеличивается отрицательное напряжение на выходе операционного усилителя 24, что вызывает закрывание транзистора 22 и увеличение сопротивления фоторезистора оптрона 21. При этом возрастает сопротивление в цепи обратной связи операционного усилителя 16 и
5
0
0
5
где К - коэффициент пропорциональности.
При соответствующей настройке коэффициента К можно добиться выполнения равенста (1) во всем диапазоне измерения массы, обеспечить максимально возможное.подавление пульсаций на собственной частоте системы, которые в спектре колебаний являются доминирующими.
Формула изобретения
Цифровая систегш автоматической регистрации веса по авт.Ъв. №960540, отличающаяся тем, что, с целью повышения точности, в нее введен функциональный преобразователь напряжения в сопротивление, подключенный между вторым выходом интегрирующего широтно-импульсного регулятора тока компенсационной катушки и вторым входом устройства коррекции.
Р
h F
| Цифровая система автоматической регистрации веса | 1980 |
|
SU960540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
