(54) СПСХ;ОБ КОНТРОЛЯ ПЕРЕМЕННОГО
: .
изобретение относится к области электрических измерений и предназначено для использования в системах порогового Конт роля напряжения в сетях переменного тока.
Известен способ контроля переменного напряжения, в частности его среднеквад- ратического значения, предусматривающий квадратичное преобразование напряжения, усреднение полученного при этом сигнала ; и измерение результата усреднения Clj to
Недостаток известного способа опреде- ляется значительным временем реализаций контроля, обусловленным необхоидмостью тщательной фильтрации сигнала при его : усреднении, т. е. усреднением сигнала за; ts достаточно большой промежуток временя, существенно превышающий период контро- ; лируемрго напряжения.
Наиболее близким техническим решенв ем к изобретению $1вляется способ контрОН 20 ля переменного напряжения, предусматрвЦ вакяций интегральное преобразование конт ропируемого напряжения в течение одно- i НАПРЯЖЕНИЯ
именных полуперводов, сравнение получает мых интегральШ .Значений с величиной . опорного напряжени9| формирование по результатам сравнения сигналов превышения контролируемым напряжением заданного порога и компенсашао частотной погреш-; ности путем коррекции интегральных значений напряжения прямо пропоршюиалъно отклонениям частоты от номинальной ве личины ..
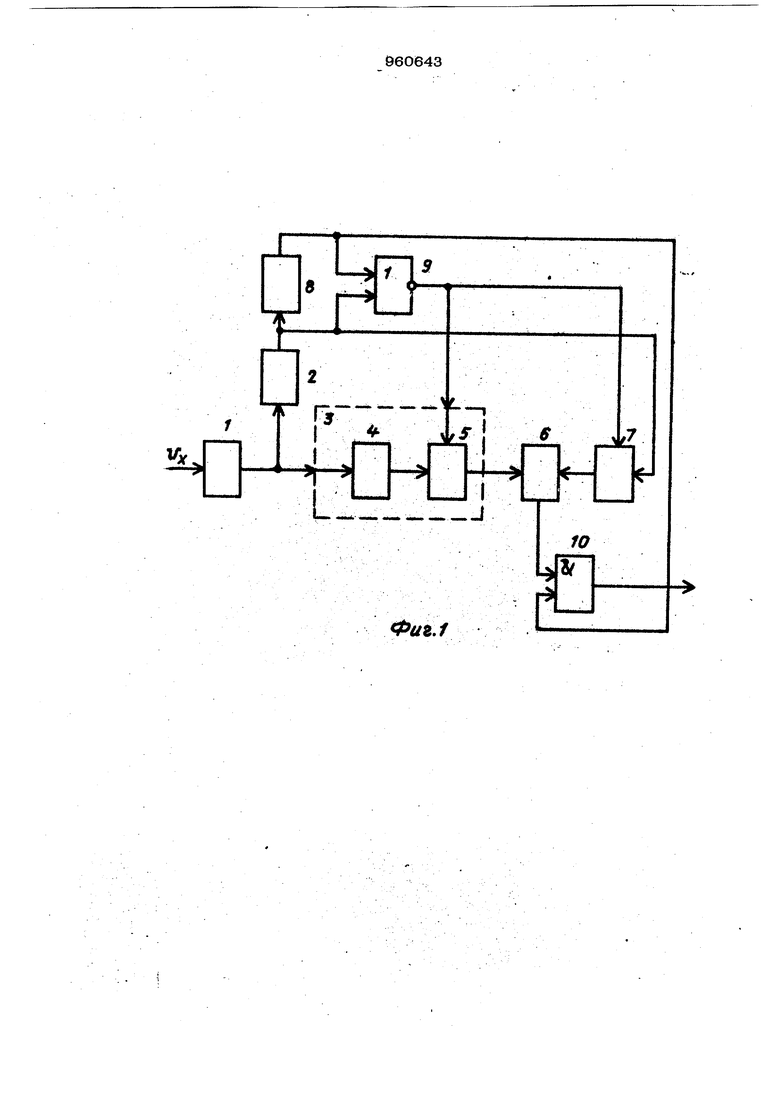
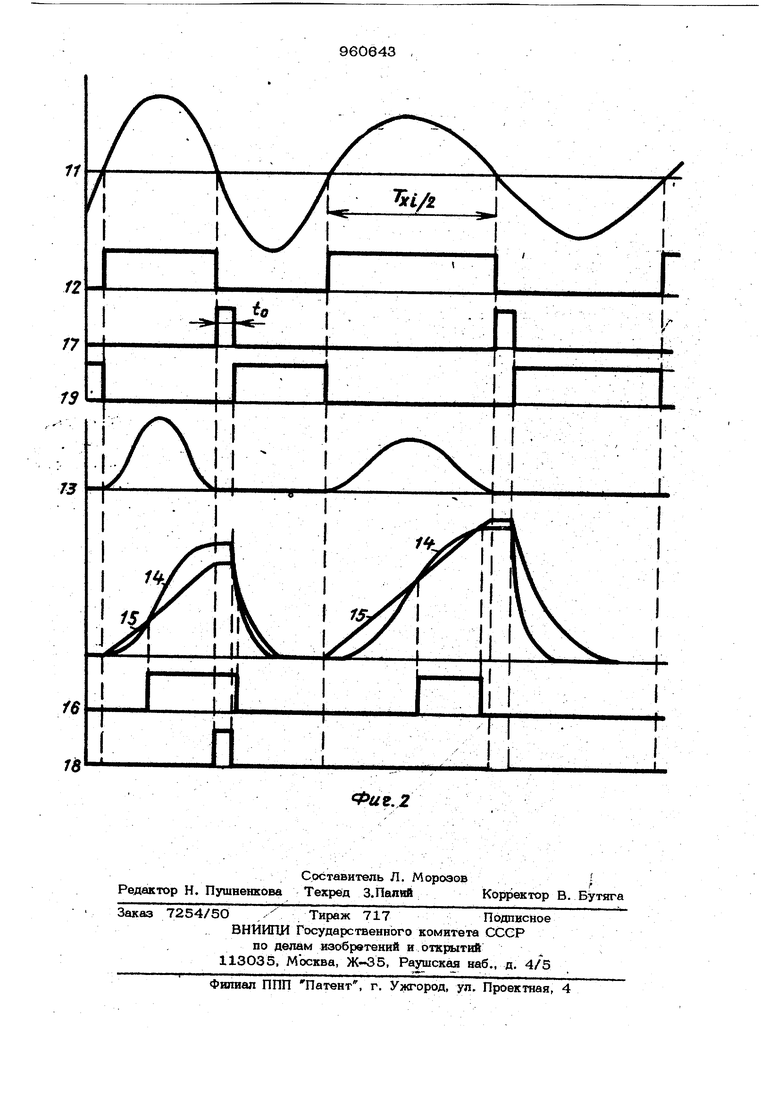
Недостаток сгавестного способа заклки чается в его сложности. Для формирова;ния сигнала компенсапии частотной по- ; t pemHOCTB контроля необходимо вырабаты ;вать сигнал эталонной длительности, сравгнивать его лвштельность с текущим значением длитепыюсти папупериода кантрохш{ мого напряжеввя, определять знак и величину раэностн этих длительностей, формировать свгвал коррекции заданной величины с дпвтетэвостью, равной разнос тя лител1яоств полупериода контролируеJMoro напряжеввя в эталонной длительности. 396 и в зависимости от знака этой разности суммировать либо вычитать сигнал коррек ции из интегрального значения, после чего сравнивать полученное откорректированное интегральное значение с величиной опорного сигнала. Совокупность перечисленных операций при практической реализации подобного контроля требует существенных аппаратных затрат. Кроме того, недоста- ток указанного способа определяется oi носительно небольшим диапазоном изменения частоты контролируемого напряжения (десятки процентов), при котором может быч обеспечена заданная точность контроля. Пелью изобретения яозляется упрощение способа контроля переменного напряжения с одновременным расширением рабочего диапазона частот. Поставленная цель достигается тем, что согласно способу контроля переменного напряжения, основанном на интеграль ном преобразовании контролируемого на- пряжения в течение одноименных полупериодов, сравнении полученных ннтегральны -.значений с величиной опорного напряжения и формировании по результатам сравнения сигналов превышения, контролируемым на- пряжением заданного порога, в качестве опорного напряжения используют линейнонарастающие сигналы с нулевыми значениями в моменты начала интегрального преобразования Контролируемого напряжения, а формирование сигналов превышения порога начин.ают в моменты окончания ука занного преобразования. Сущность изобретения можно проследить на примере осуществления контроля среднеквадратического значения переменного напряжения. На фиг. 1 изображена функциональная схема устройства, реализующего данный вариант предложенного способа; на фйГ-2 - представлены временные диаграммы сигналов, иллюстрирующие его работу. Устройство содержит датчик величины напряжения (ДВН) 1, выход которого соединен с входами блока выделения конт ролируемого полупериода (БВКП) 2 и интегро-квадратичного преобразователя (ИКП) 3, состоящего из квадрато|; а 4 и интегратора 5. Конкретное исп({йёниё ИКП 3 не имеет существенного; зйаченйя для реализации предложенного способа и он может быть выполнен также по другим известным схемам. Выход ИКП. 3 соединей с одним из входов компаратора 6, другой вход которого подключен к выходу истопника опорного напряжения, выполнен34ного в виде управляемого генератора пт нейно-нарастающих сигналов (ГЛНС) 7. Вькод БВКП 2 соединен со входом формирователя сигнала опроса (ФСО) 8, с первым входом логического элемента 9 и с управляющим входом ГЛНС 7. Выход ФСО 8 подключен ко второму входу логического элемента ИЛИ-НЕ 9 и к первому входу логического элемента И 10. Выход элемента 9 соединен со входами сброса ИКП 3 и ГЛНС 7. Второй, вход элемента 1О подключен к выходу компаратора 6, а выход элемента 10 служит общим выходом устройства. Контролируемое напряжение Оу поступает на вход ДВН 1. На выходе ДВН 1 при этом вырабатьтается напряжение U к Uy, где К - коэффициент пропорциональности. Функции ДВН может выполнять, например, согласующий измерительный трансформатор, делитель напряжения, измерительный усилитель и т, п. Напряжение с выхода ДВН 1 (диаграмма 11 на фиг. 2) подается на входы БВКП 2 и ИКП 3. БВКП 2 формирует на своем выходе прямоуголъ ныё импульсы, длительность которых повторяет длительность контролируемых по- лупериодов Tji /2 напряжения их(диаграмма 12). В качестве БВКП может использоватгзся усилитель с достаточно большим коэффициентом усиления, работаю пшй в режима переключения, нуль-индикатор и т. п. На выходе квадратора 4 вырабатывается сигнал U||( (диаграмма 13), величина которого в течение контролируемого полупериода TX /2 пропорциональна квадрату текущего значения напряжения т. е. ,. ., . U -o U :aiK U aOx, U) где oL,d - коэффициенты пропорциональности. Сигнал и 1C в течение контролируемого -j -го полуперкода интегрируется интегратором 5, при этом не выходе интегратора 5 формируется в конце контролируемого .1 -го полупераода сигнал Uci (диаграмма 14), определяемый выражением Т)н/2 Txi/1 :l UK t-dJU5 di С2) оо Принимая во внимание определение среднеквадратического значения напряжения, где ill .- среднеувадратйческое значени напряжения в контролируе мом i -ом попупериоде. выражение (2) можно привести к ви.г1у UcrQuirtil С4) Выходным сигналом БВКП 2 запускаЬ ется ГЛНС 7, на выходе которого вырабатьтается в течение действия выходного сигнала БВКП 2 опорное линейно-нарастающее напряжение (диаграмма 15), Таким образом, в конце контролируемого полупериода Ту ./2 напряжение на выходе ГЛНС 7 нарастает до величины 01,,Ч5; где -т коэффициент пропорциональности. После окончания контролируемого полу периода до момента поступления сигнала сброса напряжения на выходах интегратора 5 и ГЛНС 7 фиксированы (с точностью до разряда накопительных элементов интегратора 5 и ГЛНС 7 паразитными токами утечки) на уровне Up и UQ -COOTVветственно. Выходные сигналы интегратора 5 и ГЛНС 7 подаются на входы компа ратора 6, на выходе которого формируетс сигнал (диаграмма 16), если величина выходного сигнала интегратора 5 превышает (или равна) величину вьисодного сиг нала ГЛНС 7, т, е, если (6) Элементарные преобразования выражения (6) приводят его к виду Axi где R f/a -- константа устройства. Следовательно, сигнал, формируемый на выходе компаратора 6 в момент окончания контролируемого полупериода /2 входного напряжения 0, свидетельствует о том, что в контролируемом полупериоде среднеквадратическое значение напряжения УН превьпиает заданный уровень Vft . Нетрудно убедиться в -том, что величийа OR яЕвляется постоянной и не зависит от текущего значения частоты (периода) контролируемого напряжения Ux(Be) на тЙ определяется параметрами К , «jt и У, характеризующимся ДВИ 1, квадратор 4 и ГЛНС 7), т, е, точность контроля величины дхс данном устройстве не зависит от частоты контролируемого на- пряжения Ux Длительность периода первой волшл и в 1,5 раза меньше длительности пе-, риода второй волны UY , в то же время величина напряжения во второй волне fia меньше величины напряжения первой 9 434 волны (фиг, 2), Несмотря на то, что абсолютная величина напряжения на выходе ИКП 3 во втором контролируемом полупериоде (диаграмма 14) больше аналогнчной величины в первом контролируемом полупериоде, устройство реагирует на снижение величины Оду-во втором контролируемом полупериоде. Поскольку текущие значения величин выходных сигналов ИКП 3 и ГЛНС 7 в течение контролируемого полупериода существенно меняются, их разность в разные моменты времени меняет знак, а выходной сигнал компаратора 6 несет информацию о величине значения Уд только после окончания контролируемого полупериода TX:{ /2, общий выходной сигнал устройства формируется логическим элементом И 10, на который подается с обируюший сигнал опроса с выхода фсо 8, Последний запускается на спаде выходного сигнала БВКП 2 (т. е, привязан во времени к моменту окончания контролируемого полупериода напряжения УХ ) формирует на своем выходе импульсный сигнал опроса длительностью to (диаграмма 17), Величина to определяется частотными характеристиками элемента 1О и исполнительных схем, подключенных к его выходу, она должна быть достаточна для yBqpSHHoro срабатывания этих блоков. На практике выбирают обычно bo«T)t:,-/2, Выходной сигнал устройства (диаграмма 18) привязан во времени к сигналу опроса. Его наличие свидетельствует о том, что величина среднеквадратического значения и 1. контролируемого напряжения IJx контролируемой it. полуволне превьпиает заданный уровеньУЙСОдх / а t его отсутпстбие - о пониженном значении Цдх Цдх в контролируемом i -ей полуволне напря}кения Ux, После окончания сигнала опроса на выходе логического N элемента ИЛИ-НЕ 9 формируется сигнал, продолжающийся в течение следующего за контролируемым полупериода напряжения Ох и заканчивающийся в момент начала Hoigoro контролируемого попупериода (диаграмма 19). Этим сигналом, поступакшшм на входы сброса интегратора 5 и ГЛНС 7, разре(нается обнуаеше указанных блоков, К началу следующего контролируемого полупериода устройство находится в исходном ростояник н готово к контролю новой портопны напряжения Их , т.е. к новому |ЕШКлу работы, Таким образом, предлагаемое устройство осуществляет контроль среднеквадратического значения переменного напряжения в каждом втором полупериоде (в течение одного попупериода напряжения осуществляется его контроль, в течение следующего полупериода - восстановление входного состояйия устройства и т, д.). Для осушествления контроля напряжения в каждом его полупериоде достаточно ввес ти в устройство .второй канал, выполнений аналогично и работающий в противофазе с первым каналом устройства. Диапазон изменения частоты контролируемого напряжения, в котором устройство сохраняет работоспособонсть, пришшпиал1 ных ограничений не имеет. На практике рабочий диапазон частот ограничивается необходимостью сохранения заданной точ ности контроля. Верхняя частота определяется частотными характеристиками ис- пользованных в устройстве элементов, oi ношение верхней рабочей часто1ы к нижне задается метрологическими характеристиками интегратора 5, ГЛНС 7 и компаратора 6 (например, коэффициент подавления синфазного сигнала и дрейф нуля и т. п.). Технически несложно обеспечить контроль напряжения с заданной точностью при изменении его частоты в несколько раз без какой-либо перестройки уст| йства контроля. Расширение рабочего диапазона частот контролируемого напряжения обуславливает увеличение динамического дна- пазона выходных сигналов интегратора 5 и ГЛНС 7, что при высоких частотах напряжения приводит к снижению точности контроля вследствие неидеальности характеристик реальных элементов устройства, а при низких частотах - к насыщению выходных каскадов интегратора 5 и ГЛНС 7. Дальнейшее увеличение рабочего диапазона частот контролируемого напряжения может быть достигнуто известными способами, например, разбиением всего диапазона на ряд поддиапазонов с соответствующим переключением {перестройкой) 96 38 параметров интегратора 5 и ГЛНС 7 в каждом таком поддиапазоне. Необходимо отметить, что предлагаемое техническое решение применимо не шлька,при.аналоговой обработке сигналов, но и при цифровых, и при цифро-аналого вых методах обработки, а также может быть использовано при контроле среднего за полупериод значения переменного напр1| жения. Таким образом, предлагаемое техническое решение позволяет осуществлять быстродействующий контроль среднеквад- ратического (либо средневыпрямленного) значения переменного напряжения с точностью, не зависящей от текущего значения частоты контролируемого напряжен11Я. и э о б р е т е н и р м у л а. Способ контроля переменного напряжет ния, основанный на интегральном преобразовании контролируемого напряжения в течение одноименных полупериодов, срав нении полученных интегральных значений с величиной опорного напряжения н формировании по результатам сравнения сш налов превышения контролируемым напря жедием званного порога, отличаю щи и с я тем, что, с целью упрощения и расширения рабочего диапазона частот, в качестве опорного напряжения нсполь зуют.линейно-нарастакшие сигналы с нулевыми значениями в моменты начала ин та рального преобразования контролируемого напряжения, а формирование сигналов превышения порога начинают в моменты окончания указанного преобразования. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 155863, Kji. GO1R 19/О2, 1962. 2.ABTOpci oe свидетельство СССР по заявке Jvfe 2747660/18-21, кл. GOIR 19/02, 1979.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля переменного напряжения | 1979 |
|
SU900196A1 |
| Измерительный преобразователь интегральных характеристик сигналов | 1990 |
|
SU1739316A1 |
| Способ преобразования переменного напряжения в постоянное и устройство для его осуществления | 1981 |
|
SU1066004A1 |
| ТРАНЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ | 2011 |
|
RU2465711C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕКВАДРАТИЧЕСКОГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ | 2000 |
|
RU2198410C2 |
| Устройство порогового контроля среднеквадратического значения переменного напряжения | 1987 |
|
SU1525596A1 |
| Цифровое измерительное устройство расходомера | 1977 |
|
SU909573A2 |
| Способ фазового управления вентильным преобразователем | 1976 |
|
SU657566A1 |
| СПОСОБ СЛЕДЯЩЕГО ДИСКРЕТНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ | 1991 |
|
RU2025763C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |