I
Изобретение относится к электроизмерительной технике и предназначено для использования в системах порогового контроля среднеквадратического значения напряжения в сетях переменного тока.
Известен способ контроля переменного напряжения, предусматривающий квадратичное преобразование вход-: ного сигнала, усреднение полученного в процессе преобразования напряжения и измерение результата усреднения 1П .
Недостаток известного способа связан со значительной длительн(х:тыо контроля при его практической peamtзации, обусловленной необходимостью тщательной фильтрации напряжения при усреднении, т.е. усреднением за достаточно большой промежуток времени.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является способ контроля переменного напряжения, основанный на {{нтегрированин входного сигнала в течение его одноименных полупериодов, сравнении полученных интегральных значений с величиной опорного напряжения, формировании по результатам сравнения сигналов превышения коитролируе шм напряжением заданного порога и компенсации частотной погрешност контролй.
te
В известном способе компенсация частотной norp iHOCTH осуществляется за счет адаптивной (по отношению к изменению частоты) коррекции величины опорного напряжения. При
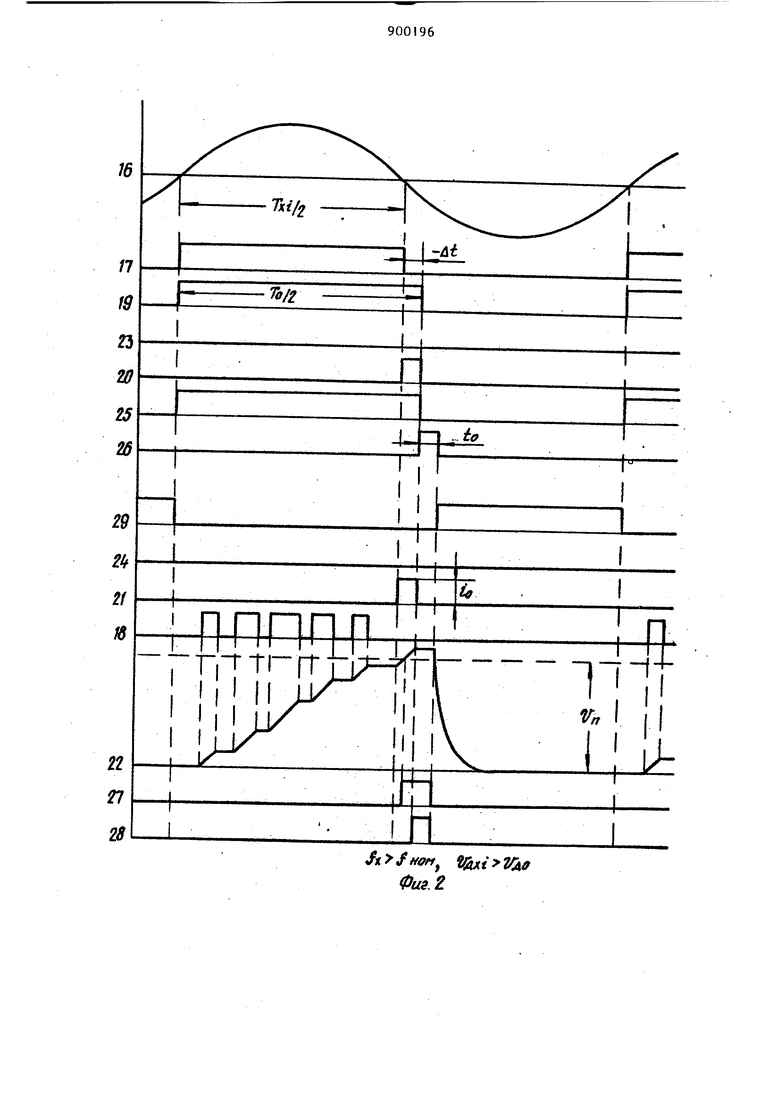
ts контролируется действующее, значе{ше напряжения с использованием прси4ежуточного логарифмического время-нкпульсного преобразоважгя, а сигнал превьазення контролируемым напря2Qжением заданного порога фop шpyeтся путем сравнения длительности время-импульсных сигналов с временной уставкой 2 . Однако известный способ имеет неудовлетворительную компенсацию частотной погрешности, и как следствие, низкую точность контроля. Эт объясняется тем, что периодическое варьирование величины опорного напряжения вызывает дополнительные ди намические погрешности в установке заданного порога контролируемого напряжения. Цель изобретения - повышение точ ности контроля переменного напряжения. Поставленная цель достигается тем, что согласно способу контроля переменного напряжения, основанному на интегрировании входного сигнала в течение его одноименных полуперио лов, соавнении полученных интеграль ных значений с величиной опорного напрякения, формировании по результатам сравнения сигналов превьшения контролируемым напряжением заданного порога и компенсации частотной погрешности контроля, компенсацию частотной погрешности осуществляют путем коррекции интегральных значений напряжения прямо пропорционально отклонениям частоты от номинальной величины. На фиг, } представлена функциональная схема устройства для контроля среднеквадратического значения переменного напряжения, реализующего предложенный способ; на фиг. 2 - временные .диаграммы, иллюстрирующие работу устройства при повьшенных значениях частоты контролируемого напряжения; на фиг. 3 то же, при пониженных значениях частоты. Устройство содержит датчик 1 величины напряжения (ДВН), блок 2 выделения контролируемого полупериода (БЕКИ), интегро-квадратичный преобразователь (ИКП) 3 с управляемым аналоговьм интегратором (УАИ) 4 я блоком 5 времЯ7Импульсного преобразова шя (ВВИП), пороговый компара тор (ПК) 6, блок 7 формирования опо ного временного интервала (ВФОИ), логические элементы ЗАПРЕТ 8 и 9, логический элемент ИЛИ 10, источник 11 корректирующего разрядного тока (ИКРТ)J источник 12 корректирующего зарядного тока (ИКЗТ), формирователь 13 сигнала опроса (ФСО), логический элемент ИЛИ-НЕ 14, логический элемент И 15, 4 Устройство работает следующим обазом. Контролируемое напряжение Vy с частотой Д. поступает на вход ДВН 1, функции которого выполняют согласующий измерительный трансформатор, елитель напряжения, измерительный усилитель и т.п. На выходе ДВН 1 формируется напряжение V k V , где к - коэффи циент пропорциональности (фиг. 2 и 3, диаграмма 16). Напряжение V подается на входы БВКП 2, БВИП 5 и на интегрирукщий вход УАИ 4. БВКП 2 вырабатывает на своем выходе прямоугольные импульсы, длительность которых повторяет длительность полупериодов напряжения V и, следовательно, длительность контролируемых полупериодов входного напряжения V (фиг. 2 и 3, диаграмма 17). В качестве БВКЛ 2 используют усилитель-ограничитель, нуль-индикатор и т.п. БВИП 5 в контролируемом полупериоде входного напряжения V формирует на своем выходе периодический импульсный сигнал (фиг. 2 и 3, диаграмма 18), следующий с частотой (fjv, 7 f ) и С переменным коэффициентом заполнения Л J , который в каадом j -ом периоде частоты f/k, пропорционален текущему значению напряжения V, т.е. Aj г v;.rKV, (1 7Aj о) где j - некоторая константа, определяемая конструкцией БВИП 5. Выходной сигнал БВИП 5 поступает на управляющий вход УАИ 4 Если на входе сброса ИКП 3 в это время сигнал сброса отсутствует, то в УАИ 4 происходит прерываемое интегрирование напряжения V. При этом процесс интегрирования разрешается сигналом на управляющем входе УАИ 4. Накопительный конденсатор интег,ратора УАИ 4 заряжается импульсами тока, величина которых определяется текущим значением напряжения УХ, частота следования равна fvv, а текущие значения коэффициента заполнения соответствуют текущим значениям напряжения V по выражению () ,
В течение контролируемого полупериода напряжения, если никаких дополнительных сигналов в УАИ 4 не подается, накопительный конденсатор интегратора заряжается до напряжения
.f ()-f
fH
ТЦ-- Г It
Vcl
Vx dt
(2)
где A,. В - константы устройства, -j - длительность i -го контролируемого полупериода напряжения V. Принимая во внимание определение среднеквадратического значения напряжения
Txi
(} t I «
где t. среднекйад атическое значение напряжения Vj(B контролйруе- мом L-OM полупериоде, выражение (2) можно привести к виду
4t-Bv,
(А)
Из выражения (4) следует, что между величиной напряже1гая на накопительном ковденсаторе интегратора Mci (и соответственно на выходе ИКП 3) в конце контролируемого I-го полупериода входного напряжения Vx и величиной среднеквадратического значения напряжения Vg в этом полупериоде имеется однозначное: соответствие, т.е. по величине Vc судят о величине данном полупериоде напряжения Vx,
Напряжение V с выхода ИКП 13 поступает на вход ПК 6. Если величина VQ превышает соответствукмцим образом выбранный порог срабатывания компаратора V|,, это свидетельствует о том, что в контролируемом полупериоде среднеквадратическое знгЬ1ение напряжения Vx превышает заданный уровень VAOI В соответствии
С выражением (4) величины V..и VAO
связаны соотношением
а V IlL
() о до г
причем V «icons t и задается какимлибо источником опорного постоянного напряжения.
При изменении частоты f входного напряжения V изменяется и длительность полупериода J.,4TO при неизменной.величине приводит к измененшо величины V. Соответственно, равенство.(5) выполняется при иной (. Это обуславливает частотного погрешность порога срабатывания устройства и погрешность контроля в целом.
Если величина V выбрана по выражешш (5) для номинального значения длительности полуяериода - входного напряжения V, (т.е. для fx х«он) соответствует V, то при ,V o const и изменяющейся величине Jp ( - -t) значение VL| определяется выражением
)«47±Vn
(6)
30
Второе слагаемое в выражении (6) характеризует величину дополнительной частотной погрешности контроля.
Для устранения этой погрешности л
5 необходимо и достаточно скомпенсировать влияние второго слагаемого на ве;н1чину V.
Указанную задачу в устройстве выполняют функциональные блоки 2,
0 7-9, II и 12.
По фронту выходного сигнала БВКП 2 запускается БФОИ 7, на выходе которого формируется сигнал заданной длительности, равной, например, но5минальной длительности полупериода входного напряжения Ux (фиг. 2 и 3, диаграмма 19). Выходной сигнал ВВКП 2 подается также на разрешающий вход элемента ЗАПРЕТ 8, на
0 запрещающий вход злемента ЗАПРЕТ 9 и на первый вход элемента ИЛИ 10. Выходной сигнал БФОИ 7 подводится к запрещающему входу элемента ЗАПРЕТ 8, к разрешающему входу элемен
5 та ЗАПРЕТ 9 и ко второму входу элемента ИЛИ 0.
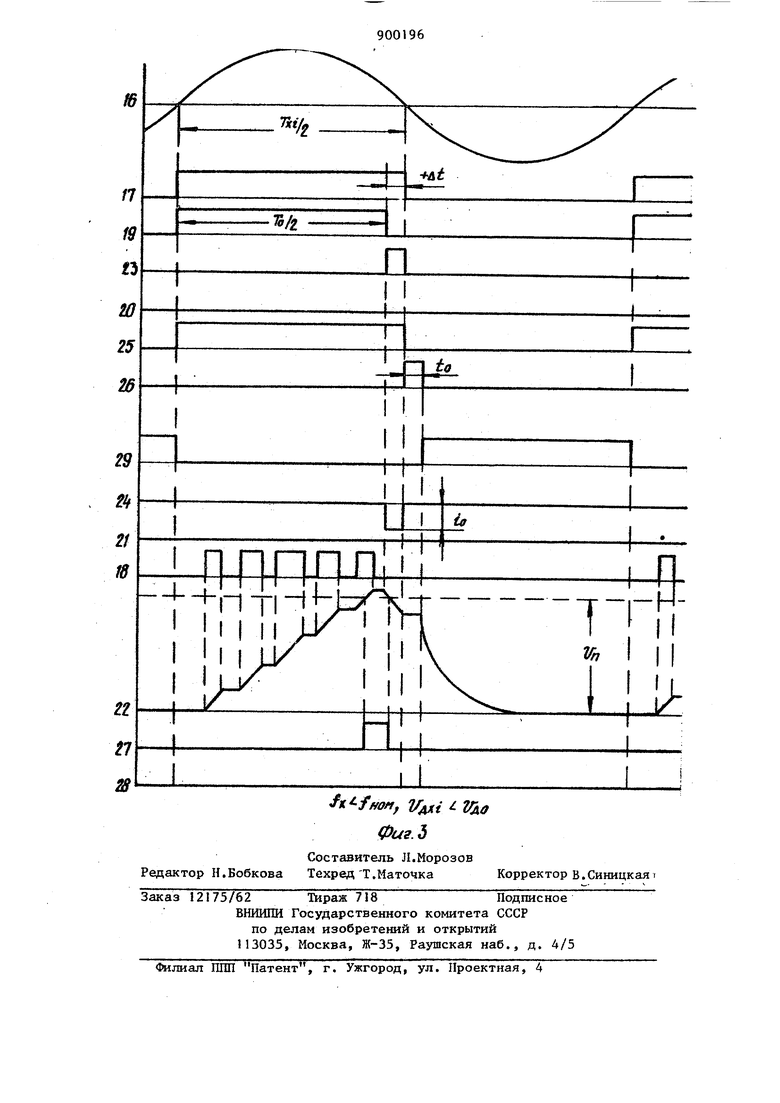
Если длтотельность контролируемого полупериода -4 входного напряжения /J оказывается меньше номинальной длительности - (fх хнонг)/ выходе элемента ЗАПРЕТ 9 формируется сигнал -ut, длительнрсть которого составляет --(фиг. 2 диаграмма 20). Этот сигнал включает ИКЗТ 12, на выходе которого вырабатывается корректирующий зарядный ток IQ длительностью t (фиг. 2, диаграмма 21), подаваемый на дополнительный вход ИКП 3 и производящий корректирующий подзаряд накопительного конденсатора в интеграторе УАИ 4. Воздействие корректирующего тока iq в течение времени д1 вызывает прирацение выходного напряжения УАИ 4 (фиг. 2, диаграмма 22) на величин - величина емкости накопитель ного ко1аденсатора в интегра торе УАИ 4. Если величина ij, выбрана в соответствии с равенством то в конце измерительного цикла работы устройства в соответствии с выражением (.6) величина напряжения на накопительном конденсаторе равна .BV т.е. при неизменном значении напряжение на выходе УАИ 4 в конце измерительного цикла остается постоянным и не зависит от величины Ato Если длительность контролируемого полупериода напряжения Vx оказывается больше номинальной длительности (х ином ) выходе элемента ЗАПРЕТ 8 формируется сигнал +Д1, длит ельность которого сос тавляет д1 -J - (диаграмма 23, фиг. З). Этот сигнал включает ИКРТ 11, на выходе которого вырабатывается корректирующий разрядный ток io дли тельностью ut (фиг. 3, диаграмма 23 подаваемый на дополнительный вход ИКП 3 и производящий корректирующий подразряд накопительного конден сатора в интеграторе УАИ 4. Воздействие корректирующего тока ifl в течение времени д1 вызывает меньшение выходного напряжения АИ 4 (фиг, 3, диаграмма 22) на веичинуAVci поэтому при неизменном значении Hvxi Ao напряжение на выходе УАИ 4 в конце измерительного цикла остается также постоянным, т.е. ,. При номинальной частоте входного напряжения М (х хнОР1 выходах элементов ЗАПРЕТ 8 и 9 никаких сигналов не формируется и коррекция величины выходного напряжения УАИ 4 не производится. Совокупность функциональных элементов 10, 13-15 обеспечивает управление работой ИКП 3 и считывание показаний с выхода ПК 6 после окончания частотной коррекции выходного напряжения УАИ 4. На выходе элемента ИЛИ 10 формируется сигнал, длительность которого повторяет наибольшую из длитель - То и -ij- (фиг. 2 и 3, диаграмностей 5 25). ма 2Ь;. На спаде выходного сигнала элемента ИЛИ 10 все процессы в измерительной части устройства уже закончены, при этом задним фронтом данного сигнала формируется импульсный сигнал опроса длительностью t (фиг. 2 и 3, диаграмма 26), разрешающий съем показаний с выхода ПК 6 (фиг. 2 и 3, диаграмма 27). Сигнал опроса стробирует элемент И 15 и, поскольку его поступление имеет место уже после осуществления частотной коррекции показаний ИКП 3, на выходе элемента И 15 формируется сигнал контроля, наличие которого свидетельствует о превьш1ении среднеквадратическим значением входного напряжения V,i заданного порога в контролируемом полупериоде (Axt VAO а его отсутствие, наоборот, указьшает на пониженное среднеквадратическое значение V () в контролируемом полупериоде (фиг.2 и 3, диаграмма 28)„ Выходной сигнал ФСС 13 подается также на один из входов элемента ИЛИ-ПЕ 14, на другом входе которого присутствует выходной сигнал элемента ШШ 10. В результате на выходе элемента ИЛИ-НЕ 14 формируется сигнал после окончания сигнала опроса и продолжается до момента н.чала следующего контролируемого полупери ода напряжения Vx (фиг. 2 и 3, диаграмма 29)о Этот сигнал управляет процессом восстановления исходного состояния ИКП 3 и поступает на его вход сброса, разряжая конден сатор интегратора УАИ 4 до нуля и подготавливая ИКП 3 к новому циклу работы. После восстановления,исходного состояния ИКП 3 Сза время, . Тр равное т . при-Ц- -) ус тройство го тово к новому циклу работы. На прак тике величина t выбирается, исходя из частотных характеристик, применяемых в устройстве элементов, обычно to « - и его влиянием на время восстановления устройства пре небрегают. Для осуществления контроля входного напряжения в каждом его полупериоде достаточно ввести в устройство второй канал, выполненный аналогично и работакиций в противофазе с первым каналом. В этом случае мно гие функциональные элементы являются общими для обоих каналов. Если диапазон изменения частоты входного напряжения V является заданным, то наиболее целесообразное решение при выборе величины опорного временного интервала, формируемого БФОИ 7, саязано с обеспечением его равенства длительности полупериода входного напряжения V при максимальной рабочей частоте. Поскольку при этом-4 оказывается больше длительности опорного временного интервала, сигнал коррекции всегда имеет опреде 1енный знак и ко струкцию устройства существенно упрощают. В этоь случае частотная коррекция ИКП 3 всегда производится в соответствий с временными диаграммами (фиг. З)о Изобретение может использоваться в цифровых и цифроаналоговых системах обработки сигналов. Кроме того, возможно его применение и для контроля среднего за полупериод значения переменного напряжения. Формула изобретения Способ контроля переменного напряжения, основанный на интегрировании входного сигнала в течение его одноименных полупериодов, сравнении полученных интегральных значений с величиной опорного напряжения, формировании по результатам сравнения сигналов превышения контролируемым напряжением заданного порога и компенсации частотной погрешности контроля, отличающийся тем, что,с целью повышения то чности, компенсацию частотной погрешности осуществляют путем коррекции интегральных значений напряжения прямо пропорционально -отклонениям частоты от номинальной величины. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 155863, кл. G 01 R19/02, 1962. 2.Морозов Л.Н.Вопросы технической реализации аналого-дискретного преобразователя для интегрируиицих дискретных трансформаторов тока. Труды МЭИ, М., 1974, Вып. 199, с. 132-143 (прототип)о
«J
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля переменного напряжения | 1980 |
|
SU960643A1 |
| СПОСОБ ЭЛЕКТРОАКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045025C1 |
| МИКРОПРОЦЕССОРНОЕ МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО РЕЛЕ ЧАСТОТЫ | 2000 |
|
RU2171475C1 |
| Беспроводная система контроля состояния массива горных пород | 1984 |
|
SU1198203A1 |
| Двухпороговое устройство контроля амплитуды переменного напряжения | 1981 |
|
SU1095077A1 |
| Обнаружитель скольжения колесных пар подвижного состава | 1982 |
|
SU1050923A1 |
| Устройство контроля скольжения колесных пар подвижного состава | 1981 |
|
SU969563A1 |
| МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ЧАСТОТНОЙ РАЗГРУЗКИ | 2002 |
|
RU2230414C2 |
| Устройство для выявления потери питания электродвигателей | 1990 |
|
SU1737624A1 |
| Устройство для контроля качества канала связи | 1987 |
|
SU1425855A1 |

й«./
Л / wft УАО Фив. 2.
