Изобретение относится к преобразованию параметров электроэнергии и может быть использовано в системах вторичного электропитания, в частности в регуляторах и стабилизаторах напряжения переменного, выпрямленного и постоянного тока.
Известен способ регулирования напряжения путем дискретного изменения коэффициента передачи регулирующего органа в функции результата его сравнения с эталонным напряжением, реализующий коммутацию регулировочных секций трансформаторного регулирующего органа в моменты перехода рабочим током нулевого уровня [1].
Недостатками известного способа регулирования являются неудовлетворительные динамические характеристики и искажение формы выходного напряжения при воздействии дестабилизирующих факторов как со стороны питающей сети, так и со стороны нагрузки.
Наиболее близким по технической сущности и достигаемым результатам к изобретению является способ следящего дискретного регулирования напряжения путем ступенчатого изменения коэффициента передачи регулирующего органа в функции результата сравнения выходного напряжения регулятора с эталонным, по которому в качестве эталонных формируют два уровня напряжения, равных соответственно максимальному и минимальному допустимым уровням выходного напряжения, определяемых заданной точностью регулирования, при этом коэффициент передачи регулирующего органа дискретного действия уменьшают в случае отклонения текущего уровня выходного напряжения в сторону увеличения от максимально допустимого либо увеличивают в случае его уменьшения от минимально допустимого значений, определяемых указанными эталонными уровнями, до момента компенсации рассогласования на выходе регулятора [2]. В случае регулирования напряжения переменного тока уровни эталонного напряжения получают путем формирования напряжений требуемой, например синусоидальной, формы с частотой и фазой, совпадающими с частотой и фазой напряжения сети, и амплитудой, равной заданному значению амплитуды выходного напряжения, а в случае регулирования напряжения выпрямленного или постоянного тока уровни эталонного напряжения формируют постоянными.
Известный способ обладает лучшими динамическими характеристиками, однако недостатком известного способа является низкая точность регулирования выходного напряжения, обусловленная наличием зоны нечувствительности при контроле выходного напряжения и сложностью реализации этой зоны достаточно малой.
Техническим результатом заявляемого способа является повышение точности регулирования выходного напряжения.
Этот результат достигается тем, что по способу следящего дискретного регулирования напряжения путем ступенчатого изменения коэффициента передачи регулирующего органа в функции результата сравнения выходного напряжения регулятора с эталонным выделяют сигнал ошибки мгновенного значения выходного напряжения по сравнению с эталонным напряжением, формируют сигнал рассогласования, пропорциональный текущему значению дискретности регулирующего органа и обратно пропорциональный сопряженному значению ошибки, определяемому значением ошибки при ближайшем состоянии регулирующего органа, меняющим знак ошибки на противоположный, при превышении модулем сигнала рассогласования максимально допустимого уровня ограничивают его на этом уровне, непрерывно интегрируют сигнал рассогласования, преобразуют интеграл сигнала рассогласования путем параллельного аналого-цифрового преобразования в соответствующий ему цифровой код и изменяют в соответствии с полученным кодом коэффициент передачи регулирующего органа дискретного действия, причем при увеличении полученного цифрового кода коэффициент передачи регулирующего органа увеличивают, а при уменьшении кода уменьшаются.
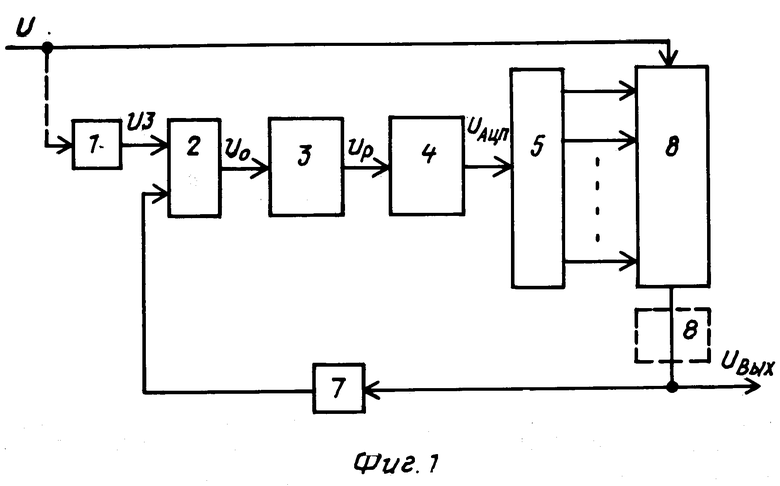
На фиг. 1 приведена функциональная схема регулятора, реализующего предложенный способ; на фиг. 2 - характеристика вход - выход функционального преобразователя сигнала ошибки в сигнал рассогласования; на фиг. 3 - эпюры напряжений в схеме при отработке различных значений эталонного напряжения задания.
Дискретный регулятор, реализующий предложенный способ содержит источник 1 эталонного напряжения, узел 2 выделения ошибки, функциональный преобразователь (ФП) 3, интегратор 4, аналого-цифровой преобразователь (АЦП) 5, регулирующий орган дискретного действия (РОДД) 6, датчик выходного напряжения (ВДН) 7, в случае регулирования выпрямленного напряжения регулятор содержит выпрямитель 8.
Выход источника 1 эталонного напряжения подключен к одному из входов узла 2 выделения ошибки, выход которого через ФП 3 и интегратор 4 подключен к входу АЦП 5. Выходы АЦП 5 соединены с входами управления РОДД 6, на силовой вход которого подается входное питающее напряжение, а выход является выходом регулятора. Если входное напряжение является переменным, а регулированию подвергается выпрямленное напряжение, то в схему вводится выпрямитель 8. Обратная связь в регуляторе осуществляется через ДВН 7, вход которого подключен к выходу РОДД 6, а выход - к другому входу узла 2 выделения ошибки.
Суть предложенного способа регулирования заключается в реализации интегрального следящего импульсного регулирования текущего уровня входного напряжения, основанного на сравнении последнего с текущим значением уровня эталонного напряжения и использовании результата сравнения в качестве информации управления коэффициентом передачи регулирующего органа. Форма эталонного напряжения определяется заданной, в общем случае произвольной, формой выходного напряжения (на фиг. 3 форма выходного напряжения выбрана знакопостоянной с переменным уровнем). В случае регулирования переменного, например, сетевого напряжения источник 1 эталонного напряжения должен формировать синусоидальное напряжение, частота и фаза которого должны совпадать с частотой и фазой напряжения сети. Формирование эталонного синусоидального напряжения, синфазного с напряжением сети, реализуется методами фазовой синхронизации генератора гармонических колебаний требуемой частоты с напряжением сети (показано на фиг. 1 пунктиром) либо путем фильтрации и астатического слежения за фазой входного напряжения с помощью перестраиваемых фильтров с последующей стабилизацией амплитуды эталонного напряжения. Могут быть использованы методы цифроаналогового синтеза колебаний требуемой формы с синхронизацией переходом сетевого напряжения через ноль. При этом предполагается, что инерционность систем формирования эталонного напряжения реализуется пренебрежимо малой относительно инерционности изменения фазы напряжения сети и, следовательно, практически не оказывает какого-либо влияния на характер динамических процессов основного контура регулирования.
Способ осуществляется следующим образом.
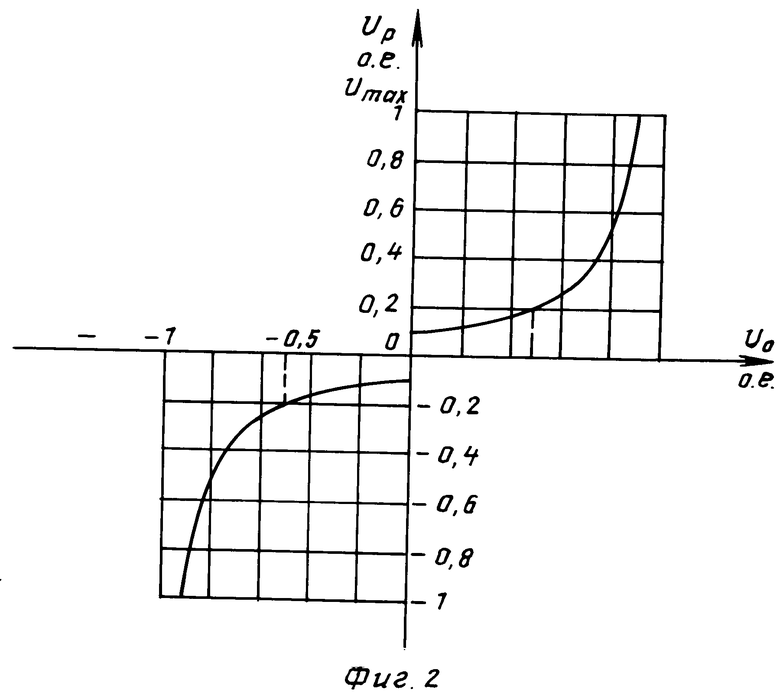
При подаче на вход управления регулятора от источника 1 постоянного напряжения какого-либо напряжения задания U3 производится его сравнение с сигналом, пропорциональным выходному напряжению Uвых регулятора. В результате этого сравнения формируется сигнал ошибки Uо, величина которого пропорциональна мгновенному текущему значению ошибки. Полученный сигнал ошибки Uo преобразуется ФП 3 в сигнал рассогласования Up таким образом, чтобы при уменьшении сигнала ошибки от среднего значения, равного половине дискретности регулирования, последняя не могла уменьшится более чем в два раза, а при ее увеличении увеличивалась бы в существенной степени. Это достигается формированием сигнала рассогласования, обратно пропорционального сопряженному значению ошибки, определяемому как значение ошибки при ближайшем состоянии регулирующего органа, меняющем знак ошибки на противоположный. Согласно вышеприведенному алгоритму при приближении значения сигнала ошибки к максимальному значению сигнал рассогласования должен возрастать теоретически до бесконечности, что нереализуемо, в связи с чем он ограничивается до значения, определяемого как максимально допустимое. Полученный сигнал рассогласования непрерывно интегрируется интегратором 4, а интеграл сигнала рассогласования подвергается параллельному аналого-цифровому преобразованию АЦП 5 в соответствующий ему цифровой код, который используется для изменения состояния РОДД 6 в прямом виде. Это означает, что при увеличении кода коэффициент передачи РОДД увеличивается, а при уменьшении кода уменьшается.
Преобразование сигнала ошибки в сигнал рассогласования, величина которого обратно пропорциональна сопряженному значению ошибки, необходимо для стабилизации частоты переключения коммутирующих элементов регулирующего органа в квазиустановившихся режимах. Временные соотношения при реализации предложенного способа в указанных режимах подчиняются следующим зависимостям.
Длительность нахождения РОДД в одном из состояний определяется выражением
tn=  , где Ти - постоянная времени интегрирования интегратора 4;
, где Ти - постоянная времени интегрирования интегратора 4;
Uп - разрешающая способность АЦП 5;
Uз - напряжение сигнала задания;
Еп - дискретность выходного напряжения РОДД 6, приведенная к входу;
К1 - текущее значение коэффициента пропорциональности ФП 3, соответствующее данному значению ошибки.
Длительность смежного интервала работы регулятора, соответствующего ближайшему состоянию РОДД 6, при котором знак ошибки меняется на противоположный, определяется аналогично:
tn+1=  , где К2 - текущее значение коэффициента пропорциональности ФП 3, соответствующему данному значению ошибки.
, где К2 - текущее значение коэффициента пропорциональности ФП 3, соответствующему данному значению ошибки.
В общем случае коэффициенты К1 и К2 различны.
Так как сумма длительностей смежных интервалов работы регулятора составляет полный период работы, то можно записать
tn + tn+1 = T.
Для определенности принимают Т = 4 Ти. Тогда получают +
+  = 4T
= 4T
(1)
Разность длительностей смежных интервалов определяют среднее значение выходного напряжения регулятора и пропорциональна значению напряжения задания в этих интервалах, т.е.
 -
-  = - 4Tи
= - 4Tи .
.
(2)
Суммируя выражения (1) и (2), получают = 4Tи
= 4Tи 1-
1-  , откуда
, откуда
(Uз+ Eп)K1=  =
=  . (3)
. (3)
Если из выражения (1) вычесть выражение (2), то после аналогичных преобразований получают
(Uз- Eп)K2=  .
.
(4)
Очевидно, что выражения (3) и (4) с точностью до знака Епсовпадают. Часть (Uз +Еп) этих выражений представляют собой сигнал ошибки, а правая часть показывает, какой величины должен быть сигнал рассогласования, чтобы обеспечить условия уравнений (1) и (2), откуда видно, что сигнал рассогласования должен быть обратно пропорционален сопряженному значению ошибки, т. е. значению ошибки при ближайшем состоянии РОДД, меняющим знак ошибки на противоположный. Таким образом выражения (3) и (4) однозначно определяют вид зависимости вход - выход ФП 3, преобразующего сигнал ошибки в сигнал рассогласования, чтобы обеспечить достижение цели - постоянство частоты переключения коммутирующих элементов регулятора.
На фиг. 3 приведена диаграмма, иллюстрирующая работу регулятора, имеющего пятиуровневый РОДД, при отработке различных уровней эталонного напряжения задания. В первоначальный момент времени сигнал задания Uзравен нулю, напряжение на выходе интегратора 4, а следовательно, и входное напряжение АЦП 5 равно нулю, напряжение на выходе РОДД 6 также равно нулю. В момент времени t1 поступает сигнал задания Uз. При этом ступенчато увеличивается сигнал ошибки Uо. Величина сигнала ошибки в данном случае существенно превышает среднее значение, равное половине дискретности РОДД 6, в связи с чем сигнал рассогласования Uрограничивается на уровне Uмакс. Интегратор 4 интегрирует сигнал рассогласования с определенным темпом. В момент достижения выходным напряжением интегратора 4 первого уровня срабатывания АЦП 5 выходной код АЦП 5 меняется и РОДД 6 меняет свой коэффициент передачи в сторону увеличения. Выходное напряжение регулятора ступенчато увеличивается, ступенчато уменьшается значение сигала ошибки, однако оно остается достаточно большим. В связи с этим сигнал рассогласования остается на уровне ограничения Uмакс и темп интегрирования не меняется. Это происходит до тех пор, пока величина сигнала ошибки не войдет в зону, пропорциональную величине дискретности РОДД 6, приведенной к входу (момент t2). В этот момент сигнал рассогласования обратно пропорционален сопряженному значению ошибки и темп интегрирования уменьшается, однако характер процесса остается монотонным. В момент времени t3 выходное напряжение интегратора 4 достигает очередного уровня срабатывания АЦП 5, меняется коэффициент передачи РОДД 6, выходное напряжение регулятора увеличивается и становится больше пропорционального напряжения задания. Знак сигнала ошибки Uо меняется, меняется знак сигнала рассогласования Up, выходное напряжение интегратора 4 начинает изменяться в противоположную сторону и регулятор входит в квазиустановившийся режим интегрального слежения за сигналом задания. В этом режиме частота переключения коммутационных элементов РОДД 6 определяется постоянной времени интегрирования интегратора 4 и разрешающей способностью АЦП 5.
При уменьшении, например, сигнала задания в пределах, не превышающих уровня дискретности РОДД 6 (момент t5), процессы протекают аналогично, но скважность переключения коэффициента РОДД 6 меняется, поддерживая среднее значение выходного напряжения регулятора пропорциональным текущему значению напряжения задания Uз. Частота переключения коэффициента передачи РОДД 6, как видно из диаграммы, остается практически постоянной (цикл t6 - t7 - t8).
При уменьшении напряжения задания Uз, превышающем величину дискретности (момент t9), процессы происходят примерно аналогично включению, но с обратным знаком сигнала ошибки, сигнала рассогласования и соответственно скорости интегрирования до тех пор, пока после очередного изменения коэффициента передачи РОДД 6 знак ошибки не изменится на противоположный (момент t11), после чего регулятор снова входит в квазиустановившийся режим переключений, отслеживая по среднему значению текущее значение эталонного напряжения задания Uз.
Реализация такого способа регулирования позволяет повысить регулировочные свойства регуляторов постоянно, переменного и выпрямленного напряжения, так как в данном режиме среднее значение выходного напряжения может иметь любой уровень и определяется величиной эталонного напряжения задания. При этом регулятор не имеет гистерезиса, по управлению характерного для способа-прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1991 |
|
RU2046528C1 |
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ МНОГОЯЧЕЙКОВЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1991 |
|
RU2026601C1 |
| Способ дискретного регулирования напряжения | 1977 |
|
SU789985A1 |
| СПОСОБ УПРАВЛЕНИЯ СЛЕДЯЩИМ АВТОНОМНЫМ ИНВЕРТОРОМ | 1991 |
|
RU2024175C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2025879C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| Устройство регулирования выпрямленного напряжения | 1991 |
|
SU1836796A3 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |

Изобретение относится к преобразованию параметров электроэнергии и может быть использовано в системах вторичного электропитания, в частности в регуляторах и стабилизаторах переменного, выпрямленного и постоянного напряжения. Техническим результатом изобретения является повышение точности регулирования выходного напряжения. Это достигается формированием сигнала рассогласования, пропорционального текущему значению дискретности регулирующего органа и обратно пропорционального сопряженному значению ошибки, непрерывным интегрированием сигнала рассогласования, преобразованием интеграла сигнала рассогласования в цифровой код и управлением на основе этого кода регулирующим органом дискретного действия. 3 ил.
СПОСОБ СЛЕДЯЩЕГО ДИСКРЕТНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ путем ступенчатого изменения коэффициента передачи регулирующего органа в функции результата сравнения выходного напряжения регулятора с эталонным, отличающийся тем, что выделяют сигнал ошибки мгновенного значения выходного напряжения по сравнению с эталонным напряжением, формируют сигнал рассогласования, пропорциональный текущему значению дискретности регулирующего органа и обратно пропорциональный сопряженному значению ошибки, определяемому значением ошибки при ближайшем состоянии регулирующего органа, меняющим знак ошибки на противоположный, при превышении модулем сигнала рассогласования максимально допустимого уровня ограничивают его на этом уровне, непрерывно интегрируют сигнал рассогласования, преобразуют интеграл сигнала рассогласования путем параллельного аналого-цифрового преобразования в соответствующий ему цифровой код и изменяют в соответствии с полученным кодом коэффициент передачи регулирующего органа дискретного действия, причем при увеличении полученного цифрового кода коэффициент передачи регулирующего органа увеличивают, а при уменьшении кода уменьшают.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ дискретного регулирования напряжения | 1977 |
|
SU789985A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
