Изобретение относится к системам автоматического управления в частности к импульсным регуляторам и может быть использовано для регулирования по ПИ закону объектов с значительным изменением коэффициента усиления.
По основному авт.св. № 391532 известен импульсный регулятор, содержащий последовательно соединенные устройство сравнения, трехпозиционный релейный усилитель, охваченный звеном гибкой отрицательной обратной связи, и исполнительный механизм, связанный с выходом трехпозиционного релейного усилителя, блок коррекции уровня гибкой отрицательной обратной связи по сигналу рассогласования, вход которого связан . с выходом устройства сравнения, а выход подсоединен ко второму входу звена гибкой отрицательной обратной связи релейного усилителя }.
недостатком известного регулятора является его низкая точность и ограниченные функциональные возможности в связи с тем, что коэффициент пропорциональности регулятора может изменяться только обратнопропорционально сигналу рассогласования.
Цель изобретения - повышение точности и расишрение функциональных возможностей регулятора.
с .Поставленная, цель достигается тем, что в регуляторе установлен формирователь сигнала переключения, выход которого соединен со вторым входом блока коррекции уровня -гибкой
|Q от зицательной обратной связи по
сигналу рассогласования, причем блок коррекции уровня гибкой отрицательной обратной связи по сигналу ра.ссогласования содержит последовательно соединенные усилитель, звено
15 определения обратно пропорциональ;ной величины и переключатель, второй вход которого соединен с выходсм усилителя, а третий вход - со вторым входом блока коррекции уровня
гибкой отрицательной обратной связи по сигналу рассогласования, первый вход которого соединен со входом усилителя, а выход - с выходом переключателя, причем звено гибкой
25 отрицате.|1ьной обратной связи содержит два ключа, выходы которых соединены с соответствующимивходами сумматора, выход которого через апериодическое звено соединен с выходом ааена гибкой отрицательной обратной связи, первый вход которого соединен с первыми входами ключей, а второй. вход - со вторь1ми входами ключей,
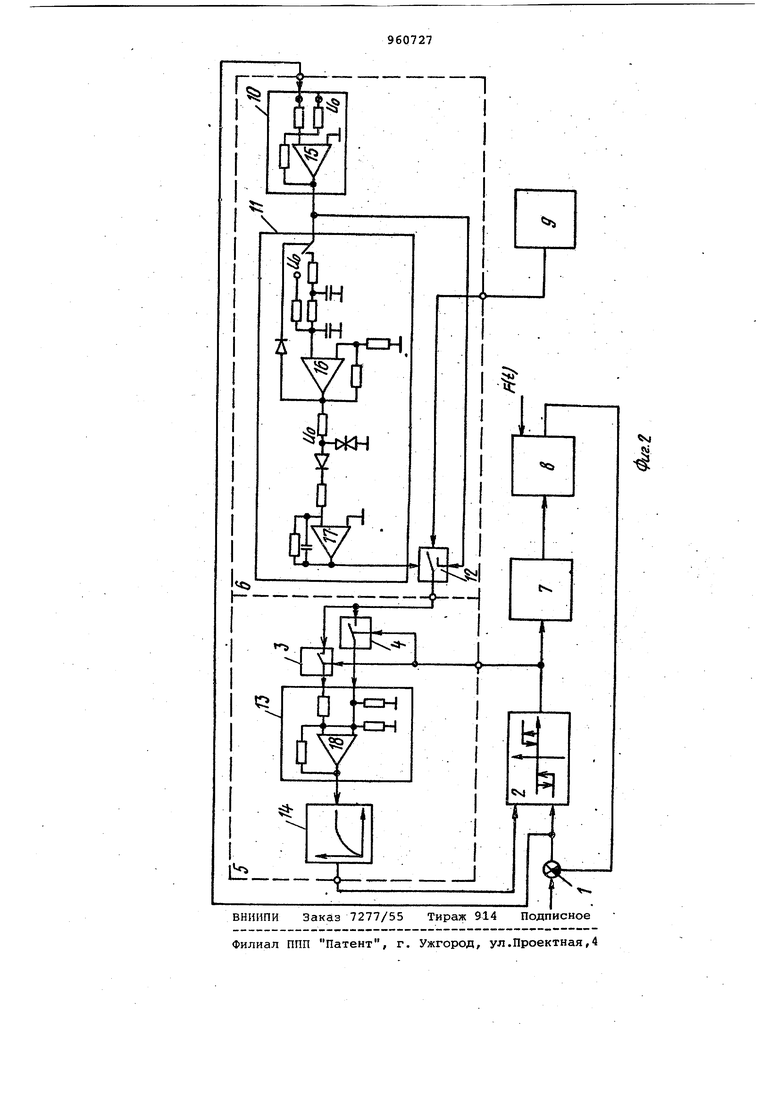
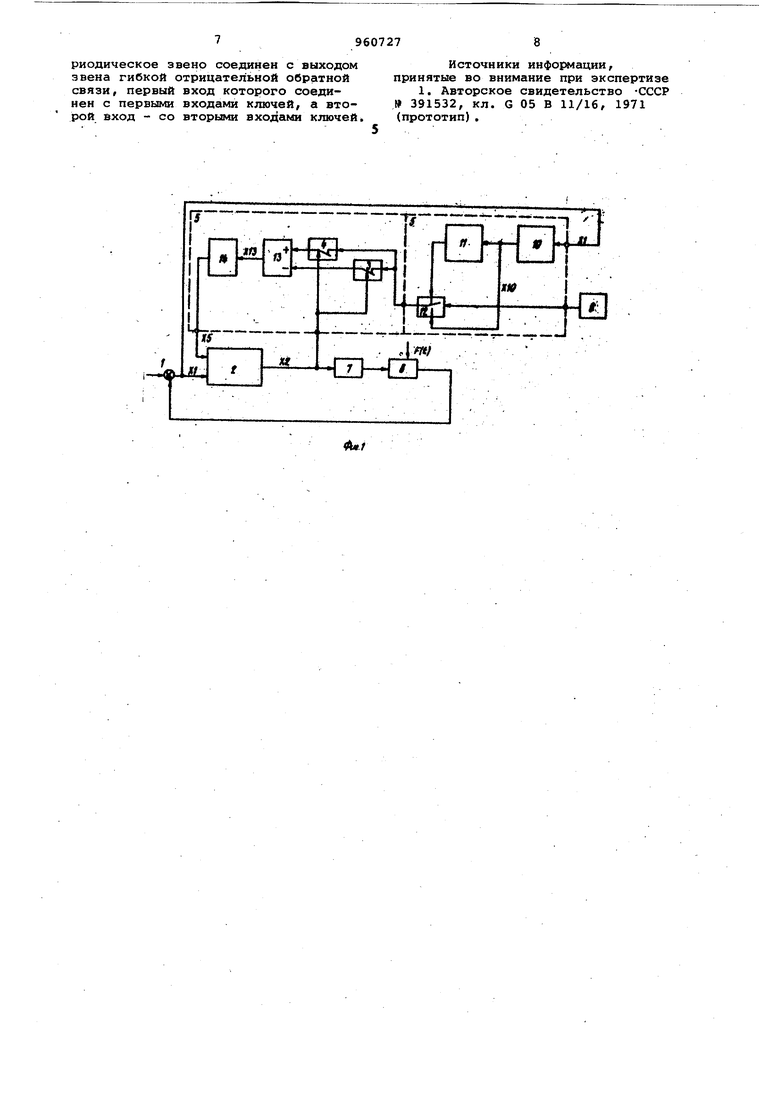
. На фиг.1 представлена блок-схема предлагаемого регулятора; на фиг,2 принципиальная электрическая схема предлагаемого регулятора.
Регулятор содержит устройство 1 сравнения, трехпозиционный релейный усилитель 2, первый и второй ключи 3 и 4, звено 5 гибкой отрицательной обратной связи (ГООС), блок б коррекции уровня- ГООС по сигналу рассогласования, исполнительный механизм 7, объект 8 регулирования, формирователь 9 сигнала переключения, усилитель 10, звено 11 определения обратно пропорциональной величины 11 переключатель 12, сумматор 13, апериодическое звено 14, операционные усилители 15-18, UQ - опорное напряжение, х - выходной сигнал i-oro функционального блока, F(t) - возмущающее воздействие.
Регулятор работает следующим образом.
Сигнал рассогласования х с устройства 1 сравнения поступает на входы трехпозиционного релейного усилителя 2 и блока б коррекции ГОО
При превышении сигналом рассогласования порога срабатывания трехпоэиционного релейного усилителя 2 на. выходе последнего появляется сигнал, включающий исполнительный механизм 7 в направлении, соответствующем уменьшению рассогласования, и замыкающий один.из ключей 3 или 4. При этом сигнал Xg с выхода блока б коррекции ГООС через сумматор 13 подается на вход апериодического звена 14.
I
Выходной сигнал апериодического
звена 14 (сигнал отрицательной обратной связи) Ху имеет знак, противоположный знаку сигнала рассогласования х, поэтому суммарный сигнал на входе трехпозиционного релейного усилителя 2 начинает уменьшаться. Когда этот суммарный сигнал уменьшится до порога отпускания релейного усилителя 2, выходной сигнал последнего станет равным нулю, при этом исполнительный механизм 7 отключится, а ключ 3 (или 4) разомкнется. Сигнал Xg начнет уменьшаться , а суммарный сигнал на входе релейного усилителя 2 начнет расти. Когда суммарный сигнал вновь превысит порог срабатывания, на выходе . релейного усилителя 2 снова появится сигнал. Так будет продолжаться до тех пор, пока сигнал рассогласования х не окажется меньше порога срабатывания релейного усилителя 2,
Апериодическое звено 14 описывается передаточной функцией
Х5(Р)
.14
(1)
Х,,(Р)
t 4Pгде X
, . - сигнал на входе и выход , апериодического звена 1
р - оператор Лапласа; К С - коэффициент усиления и постоянная времени апериодического звена 14. Формирование входного сигнала апериодического звена 14 происходит в блоке 6 коррекции уровня ГООС. Усилитель 1C) осуществляет преобразование ригнала х по заданному закону , f(x). Звено определения обратно пропорциональной величины 11 служит для получения обратной
ч УНКЦИИ Х 1/f (Х ) .
Положением переключателя 12, которым управляет формирователь 9 сигнала переключения определяется како сигнал поступает на выход блока б коррекции ГООС, х, то есть выполняется равенство х.. х или
о -io
6 - -f
При продолжительном сигнале на выходе трехпозиционного релейного . усилителя 2 замыкается ключ 3 и на инвертирующий вход сумматора 1.3 в зависимости от положения переключателя 12 поступает либо сигнал Xg f(х), либо сигнал х g 1/f(х При отрицательном сигнале на выходе трехпозиционного релейного усилителя 2 замыкается ключ 4 и выход переключателя 12 подсоединяется к неинвертирующему входу сумматора 13.
Работа регулятора в автоколебательном режиме описывается следующими соотношениями
i(pj - ( °
(2) (р) ( -13 (р)
Х,,(р) Х (р) f (Х) , .
N-s(pf Чр;ш7)
ioo
t - v - передаточная функция апегде W
4(р) риодического звена 14; i(p) скважность выходных импульсов трехпозиционного релейного усилителя 2; выходной сигнал интегри7(Р) рующего исполнительного механизма 7 (регулирующее воздействие); время перекладки исполиллнительного механизма 7. Решая- систему уравнений (2) с учетом (1), получим зависимость 5 выходного сигнала регулятора (регу- лирующего воздействия) от сигнала рассогласования у -1 . . С-|4- 00 Л. (3) %Р)-«х,) ,Mv4i4pri(p; .(г) Таким образом, в зависимости от положения переключателя 12 коэффици ент Пропорциональности регулятора либо обратно пропорционален функции f(x) (если переключатель 12 соединяет выход усилителя 10 со входами ключей 3. и 4), либо .прямо пропорцио нален функции f(Xj) (если переключа тель 12 соединяет выход звена определения обратно пропорциональной ве личины 11 со входами ключей 3 и 4). Принципиально на первый лход блока 6 коррекции ГООС вместо сигна ла рассогласования х: может быть подан любой другой сигнал системы регулирования. Сигналом, подаваемым с пульта управления оператора, можн осуществлять ручную дис- анционную установку коэффициента пропорциональности при настройке регулятора. Во всережимных системах, когда параметры объекта меняются в широких пределах, на первый вход блока 6 коррекции ГООС может быть подан выходной сигнал со специальной .логической схемы, оценивающей режим работы объекта и изменяющей настройку регулятора в соответствии с заданно программой. Сигнал х может быть за менён сигналом с управляющей машины оценивающей работу системы в целом и определяющей оптимальное значение коэффициента пропорциональности регулятора в соответствии с заданным критерием качества. На принципиальнЬй электрической схеме регулятора (фиг.2) усилитель 10, построенный на операционном уси лителе 15, преобразует сигнал х по закону X,f(v.)Uo(.+K-,5) где К. - коэффициент пропорциональности усилителя, выполненного на операционном усилителе 15; Up - опорное напряжение, равное 100% диапазона изменения сигнала х. На выходе звена определения обратно пропорциональной величины 11, состоящего из блока деления и фильт ра, выполненных соответственно на операционных усилителях 16 и 17, формируется сигнал, равный « f (x)() Передаточные функции регулятора в зависимости от положения переключателя 12 имиот вид (, (7) X, 1Р) W Т(Р) -1C ), PtP) - Тл) М4РUo где Коп начальное значение Р° коэффициента пропорциональности, % выхода % входа выходной сигнал интегрирующего исполнительного механизма , % : сигнал рассогласования, %. Таким образом, регулятор имеет коэффициент пропорциональности, который изменяется от начального значения либо пропорционально, либо обратно пропорционально сигналу х. Предлагаемый регулятор позволяет на 30% повысить точность установки коэффициента пропорциональности. Функциональные возможности регулятора расширены за счет увеличения диапазона изменения коэффициента пропорциональности (десятикратное увеличение или уменьшение установленного значения) и также за счет увеличения количества возможных законов изменения. Формула изобретения 1. Импульсный регулятор по авт. св. 1 391532, от. личающийс я тем, что, с целью повышения точности и расширения функциональных возможностей регулятора, в нем установлен формирователь сигнала переключения, выход которого соединен со вторым входом блока коррекции уров- . ня г«бкой отрицательной обратной связи по сигналу рассогласования, причем блок коррекции уровня гибкой отрицательной обратной связи по сигналу рассогласования содержит, последовательно соединенные усилитель, звено определения обратно пропорциональной величины и переключатель, второй вход которого соединен с выходом усилителя, а третий вход - со вторым входом блока коррекЦии уровня гибкой.отрицательной обратной связи по сигналу рассогласования, первый вход которого соединен со входом усилителя, а выход с выходом переключателя. 2. Регулятор по п. 1, о т л ич ающийся тем, что звено гибкой отрицательной обратной связи содержит два ключа, выходы которых соединены с соответствующими входами сумматора, выход которого через апериодическое звено соединен с выходом звена гибкой отрицательной обратной связи, первый вход которого соединен с первыми входами ключей, а второй вход - со вторыми входами ключей.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство -СССР 391532, кл. G 05 В 11/16, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ РЕГУЛЯТОР | 1973 |
|
SU391532A1 |
| Импульсный регулятор | 1978 |
|
SU744438A2 |
| Устройство для автоматическогоупРАВлЕНия Об'ЕКТАМи C TPAHC-пОРТНыМ зАпАздыВАНиЕМ | 1979 |
|
SU796789A2 |
| Импульсный регулятор | 1976 |
|
SU630612A2 |
| Импульсное регулирующее устройство | 1983 |
|
SU1151926A1 |
| Регулятор нагрузки горной машины | 1974 |
|
SU581270A1 |
| Импульсный регулятор | 1981 |
|
SU1004969A1 |
| Регулятор | 1977 |
|
SU930242A1 |
| Релейная система регулирования | 1981 |
|
SU999012A1 |
| Устройство для автоматической раз-гРузКи гидРОКлАССифиКАциОННыХ АппА-PATOB | 1979 |
|
SU812346A1 |