Изобретение относится к релейНЕлм ,системам, содержащим релейный блок с инерционной обратной связью, и мо-. жат быть использовано при управлении и регулировании горными машинами, в частности при регулировании нагрузки проходческих комбайнов и буровых машин .
Известна репейная система регулирования, содержащая последовательно соединенные задатчик, блок сравнения, трехпозиционный релейный блок,исполнительный механизм и объект регулирования , выход которого соедин1эн с вторым входом блока сравнения, а также инерционный блок обратной связи, первый вход которого подключен к выходу трехпозиционного релейного блока, а второй вход через блгк коррекции подключен к выходу блока сравнения, . а выход подключен к второму входу трехпозиционного релейного блока til..
Однако регулятор известной систеьм имеет постоянный козффициент усилення и поэтому она обладает низким йлстродействием и точностью в том слу.чае, когда коэффициент усиления объекта регулирования изменяется в ШИРОКИХ пределах. Появление высоко:частотн 1х составляющих в известной степени приводит к частым срабатываниям релейного и исполнительного Механизма, т.е. к сокращению срока службы всей системы..
Известна также релейная система регулирования, содержащая последойатально соединенные задатчик,блок сравнения
10 трехпозиционный релейный блок, исполнительный механизм, объект регулирования, выход которого соединен с втором входом блока сравнения, а также сум- мирующий блок, первый вход которого соединен с выходом трехпозицнонного
15 релейного блока, второй выход через датчик скорости подключен к шлходу испол1штельного механизма, а выход через инерционный блок соединен с вторым входом трехпозициоиного релей20ного блока 23.
В этой системе за счет подстройки коэффициента усиления регулятора осуществляется -стабилизация общего коэффициента усиления системы в том
25 случае/ когда коэффициент усиления объекта регулирования меняется в широком диапазоне. Однако определение необходимого коэффициента усиления . регулятора этой системы производится
0 .на основе априорной информации об
объекте регулирования, которая является накоторым приближением его реальных параметров, поэтому, несмотря на стабилизацию общего коэффициента усиления систем л , открытым остается вопрос оптимален ли он . Из вестно, что дл различных режимов работы системь 1 нужны различные критерии оптимальности. Так например, при большом сигнале рассогласования оптимальным является критерий максимума быстродейстБия, что достигается увеличением коэффициента усиления системы до максимального. При малых сигналах рассогласования критерием оптимальности является минимум ошибки, что имеет место на границе устойчивости системы. А при появлении высокочастотных составляющих в системе происходят часты срабатывания регулятора вхолостую, что сокращает срок службы системы и, следовательно, в этом режиме критери,ем оптимальности является увеличение срока службы системы. Таким образом, для различных режимов работы известной системы необходимы различные критерии оптимальности,а значит,и различные значения коэффициентов усиления системы, а не стабилизация значения коэффициента усиления, осуществляемая в изве стной системе.
Наиболее близкой к изобретению по технической сущности является релейная система регулирования, содержащая последовательно соединенные детектор и инерционный блок и последовательно соединенные задатчик, первы блок сравнения, второй сравнения, усилитель, трехпозиционный реленый блок и исполнительный механизм, подключенный выходом к входу объекта регулирования, подключенного выходом к второму входду первого блока сравнения, выход инерционного блока подключен к второму входу второго блока Сравнения 3,
Недостатки известной системы низкие точность и быстродействие, а также малая ее долговечность.
Цель изобретения - повышение точности , быстродействия и долговечности системы.
Поставленная цель достигается тем что в системедополнительно установлены последовательно соединенные триггер и дифференцирующий блок, выход которого соединен с входом детектора, а вход трипера подключен к выходу трехпозиционного релейного блока.
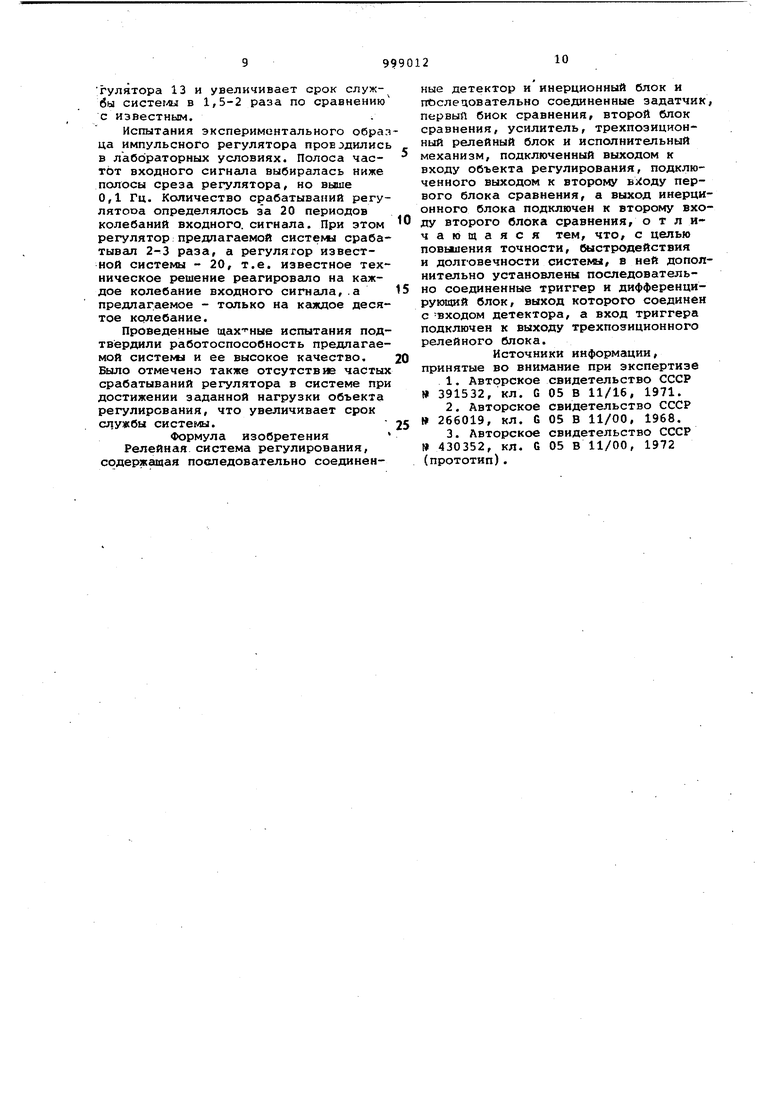
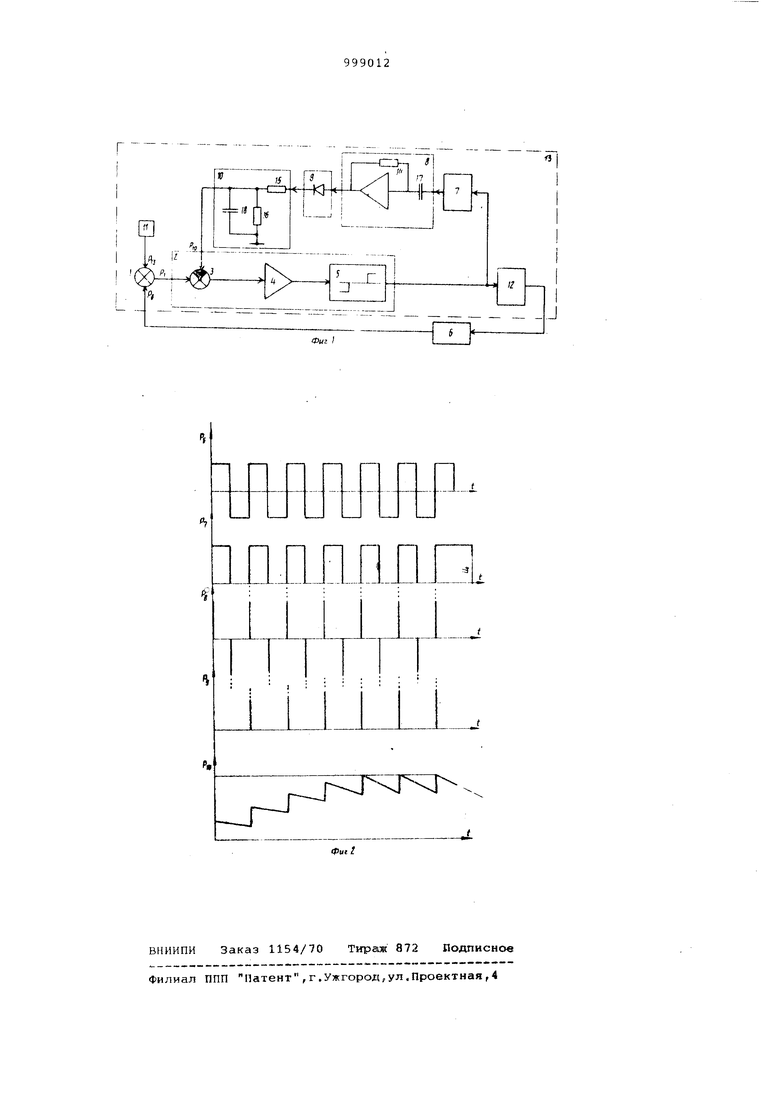
На фиг. 1 представлена блок-схема системы; на фиг. 2 - временные диаграммы работы ее основных блоков.
Система содержит первый блок сравнения 1, релейный усилитель 2, второй блок сравнения 3, усилитель 4, трвхпозиционний релейный блок 5, объект регулирования 6, триггер 7,
дифферен1;ирую1аий олок 8, детектор 9, инерционный блок 10, задатчик 11, исполнительный механизм 12, регулятор 13, резисторы 14-16, конденсаторы 17 и 18.Р - сигнал на выходе i-ого блока системы, t - время,
Система работает следующим образом.
На блок сравнения 1 поступают фактическое значение регулируемого сигнала Р с выхода объекта регулирования 6 и сигнал задания с выхода задатчика 11. В блоке сравнения 1 сигналы Р и P jсравниваются и на его выходе формируется сигнал рассогласования Р, который поступает на вход релейного усилителя 2.Трехпозиционный релейный блок 5 релейного усилителя 2 устанавливается в одн из трех состояний: наброса (+ 1), сброса i,-l) и нейтральное (О), в зависимости от величины и знака сигнала рассогласования Р-, и коэффициента усиления усилителя 4. Выходной сигна Pg- релейного усилителя 2 через испол нительный механизм 12 воздействует н объект регулирования таким образом, чтобы регудируемнй сигнал Р стремился к сигналу задания Р,- Одновременно выходные сигналы релейного усилителя 2 поступают на триггер 7, который в зависимости от полярности входного сигнала переключаете. в одно из своих состояний (1,0), Пока на выходе релейного усилителя 2 отсутствует зпагапеременный сигнал ) , триггер 7 находится в одном из устойчивых состояний (1 или 0). При Г:: .: выходной сигнал триггера 7 не ироходит через дифференцирующий бпок : и на выходе сигнал Р инерцион;-;ого блока 10 будет равен нулю. При этоь. усилитель 4 максимальный коэффициент усиления, равный практически бесконечности, что повышает быстродействие системы и минимизирует ее ошибку. Рассмотренный случай характерен для режима системы, когда средняя величина ее сигнала рассогласования не равна . Если средняя величина рассогласования Р системы равна нулю, то это означает достижение объектом регулирования 6 заданной нагрузки. Отклонение сигнала рассогласования от нуля в положительную или отрицательную сторону приведет к появлению знакопеременного сигнала на выходе релейного усилителя 2, который воздействует на объект регулирования 6 таким образом чтобы сигнал рассогласования Р. был равен нулю. Если этого сделать не удается, то на выходе релейного усидителк 2 знакопеременный сигнал не исчезнет и будет вызывать переключение триггера 7 с частотой изменения сигнала Р(фиг. 2). Знакопостоянные импульсы с выхода триггера 7 проходят дифференцирующий блок 8 н иреоб{5аэуются в поаледовательность знакопеременных импульсов типа дельтафункции, временное положение которых соответствует положению перед его и заднего фронтов прямоугольных импульсов на выходе триггера 7. Детектор 9 пропускает с выхода дифференци рующего блока 8 импульсы только одной полярности. Таким образом, на вы ходе детектора 9 появятся знакопеременные импульсы типа дельта-функции, которые поступают на вход инерционного блока 10, где происходит их сглаживание и накопление. Постоянная времени заряда Tj и постоянная времени разряда Тр инерционного блока 10 определяются по формулам 5 «15 Ь Выходной сигнал инерционного блок 10поступает на блок сравнения 3,где вычитается из сигнала рассогласования Р, . Это приводит к уменьшению ко эффициента усиления усилителя 2, до тех пор, пока знакопеременные импуль сы на выходе релейного усилителя 2 не исчезнут, или их частота не стане меньше 0,1 Гц. Частота 0,1-Гц являет ся нижней частотой знакопеременного сигнала релейного усилителя 2, как при возникновении в системе автоколебаний, так и при появлении в спикт ре сигнала Р высокочастотной помехи, которую система не успевает отрабатывать. Эта частота определена при анализе осциллограмм нагрузок широкого класса проходческих комбайнов, бурильных и буровых машин, как минимальная частота знакопеременного вы ходного сигнала релейного усилителя 2 в установившемся режиме работы сие темы, т.е. при среднем значении ошиб ки рассогласования Р , равной нулю. Таким образом, если в спектре сигнала Р/ присутствует высокочастотная помеха, которую система из-за ограни ченного быстродействия не успевает отработать, то коэффициент усиления усилителя 4 уменьшается, что предотвращает частые срабатывания регулятора вхолостую и увеличивает срок ег службы. Если в системе отсутствуют высокочастотные помехи, то она выводится на границу устойчивости, где достигается минимум ошибки, а следовательно, увеличивается ее качество. Происходит это следующим образом. Пока сигнал рассогласования не меняет своего, знака, сигнал местной отрицательной обратной связи равен нулю, и коэффициент усиления усилителя 4 практически равен бесконечности Однако максимальный коэффициент усиления усилителя 4 приводит к возникновению автоколебаний, отрицательные последствия которых общеизвестны.Автоколебания вызывают появление знакопеременного сигнала на выходе релейного усилителя 2 с частотой бопьше 0,1 Гц. Это вызывает увеличение сигнала местной отрицательной обратной связи, а следовательно, уменьшение коэффициента усиления усилителя 4 до тех пор, пока автоколебания не исчезнут, то с ними исчезает знакопеременный сигнал на выходе релейного усилителя 2, что вновь вызовет увеличение коэффициента усиления усилителя 4. Таким образом, коэффициент усиления системы.будет иметь величину, близкую к границе устойчивости, не переходя в область неустойчивости, что обеспечивает устойчивую работу системы с минимальной ошибкой. Причем нахождение системы на границе устойчивости обеспечивается при широком изменении как параметров объекта регулирования 6, так и ceiMoro регулятора 13. Если сигнал рассогласования представляет собой колебательный сигнал с переменным во времени средним значением, например нарастающим, это имеет место, когда среднее значение Р больше Р-(з выходе релейного усилителя 2 будут появляться сигналы преимущественно одного знака( в данном случае сброса нагрузки ), а частота следования знакопеременных импульсов на его выходе будет уменьшаться, это приведет к уменьшению выходного сигнала инерционного блока 10, а следовательно, к увеличению коэффициента усиления усилителя 4 и повышению быстродействия системы, что обеспечивает отработку сигнала рассогласования с минимальным временем. Таким образом, если среднее значение фактического сигнала Р, изменяется во времени, то общий коэффициент усиления системы становится максимальным. Если среднее значение Р стабилизируется на заданном уровне, то общий коэффициент усилсгния системы приближается к границе устойчивости. Если в системе появятся высокочастотные помехи, которые регулятор 13 не успевает отработать, то коэффициент усиления его уменьшается до уровня, при котором эта помеха через регулятор 13 не проходит. Если Б системе появится сигнал с малым отклонением от среднего значения, которое стремится к заданному, то он не будет вызывать появление знакопеременного сигнала на выходе релейного ус шителя 2, что приведе г к увеличению коэффициента усиления , усилителя 4 практически до бесконечности, благодаря чему этот сигнал буде отрабатываться системой с максимальным быстродействием и минимал ной ошибкой. На фиг. 2 приведены временные диаграммы работы блоков 5, 7, 8, 9 и 10 регулятора 13. Причем рассматрива ется тот частный случай, когда выходной сигнал трехпозиционного релей ного блока 5 является энакопеременнам с периодом Т. Реакция блоков 7-9 на этот сигнал описана выше, поэтому поясним лишь прохождение после довательнос и знакопеременных импул сов типа дельта-функции через инерционный блок 10. Очевидно, что пери повторения этих импульсов будет также равен Т Используя методику расчета импульсных систем можно показать, что выходной сигнал инерционно го блока 10 описывается разностным уравнением P..oK-°)T7K(3, (VOj-PjJ n.DTg.OJ.Y- ( где Т Тр - постоянные времени заряда -и разряда инерционного блока 10; Тр - период выходного сигнала блока 5; Up - сигнал логической единицы триггера 7; Тд - постоянные- времени дифференцирующего блока 8; п - натуральный ряд чисел fl 1 5 . I . , . , Очевидно, что оягнал Р увеличивается до тех пор,- пока Sie будет вы полнено- соотношение .-Oyoj., Uj Подставляя формулу 13 ) в формулу is), получим -V Jmax т тдер- ; 6 ) будет выполняться при Формула Используя формулу (6 ) можно полу чить максимальный коэффициент переда чи цепи местной отрицательной обратн связи и минимально ч коэф ицйант у сипения всего релейного усилителя 2 Ч 5 т8 ) гдь (Tiin минимальный кoэффнциaнt усиления релейного усил теля 2; К4 - коэффиииент усиления усилителя 4; Kg - коэффициент усиления трехпозиционного релейного блока 5 ( принимается обычно его линеаризованное значение) К - коэффициент усиления триггера 7, равен отношению модулей сигналов логической единицы на входе и выходе. Для большинства выпускаемых серий-. но триггеров К-, 1. Учитывая то, что формулу (в ) преобразуем к (е --.) Этот коэффициент усиления усилителя 2 будет иметь место лишь после тог,о, когда будет выполнено соотношение (.7 ). Исходя из принятой минимальной частоты TO 0,1 Гц, при которой выходной сигнал растет, определяем Т р 3,3 с. Подставив это значение Тр в формулу V7), получим nfo где t „ время установления минимального коэффициента усиления релейного усилителя 2. Т.е. в течении 10 с после появления знакопеременных импульсов на выходе релейного усилителя 2 системе отрабатывает возникшее рассогласоваваниа с высоким коэффициентом усиления, но если знакопеременные г мпульси не исчезают, то через 10 с установится минимгшьный коэффициент усиления релейного усилителя 2, соответствующий формуле (9), при этом сигнал на его выходе будет отсутствовать. Предлагаемое техническое решение позволяет .повысить точность систеглы на 20% в том случае, когда среднее значение сигнала рассогласования сие-. темы равно нулю, потому что введение новых блоков и связей обеспечивает работу системы на границе устойчивости, где сллибки минимальны. Боли среднее значение сигнала рассогласования не равно нулю, т.е« оно одного знака, то в системе благода™ ря наличию новых блоков и связей установится максимальное быстродействие f что достигается увеличением коэффициента усиления усилителя 4 практически до бесконечности. Это позволяет повысить быстродействие систекаг н 1,5-2 раза по сравнению с известными системами. Если в сизтеме возникнут высокочастотные помехи, которые не могут быть отработаны регулятором 13 мэ-за ограниченного быстродействия, то его коэффициент усиления уХ1вньшавтся,что1 исключает холостые срабатывания регулятора 13 и увеличивает срок службы систеглл в 1,5-2 раза по сравнению с известным.
Испытания экспериментального образца импульсного регулятора проводились в лабораторных условиях. Полоса частот входного сигнала выбиралась ниже полосы среза регулятора, но выше 0,1 Гц. Количество срабатываний регулятооа определялось за 20 периодов колебаний входного, сигнала. При этом регулятор предлагаемой системы срабатывал 2-3 раза, а регулятор известной системы - 20, т.е. известное техническое решение реагировало на каждое колебание входного сигнала,.а предлагаемое - только на каждое десятое колебание.
Проведенные испытания подтвердили работоспособность предлагаемой система и ее высокое качество. Было отмечено также OTCVTCTBIK частых срабатываний регулятора в системе при достижении заданной нагрузки объекта регулирования, что увеличивает срок службы системы.Формула изобретения
Релейная система регулирования, содержащая последовательно соединенные детектор и инерционный блок и ггьслецовательно соединенные задатчик первый биок сравнения, второй блок сравнения, усилитель, трехпозиционный релейный блок и исполнительный механизм, подключенный выходом к входу объекта регулирования, подключенного выходом к второму входу первого блока сравнения, а выход инерционного блока подключен к второму входу второго блока сравнения, отличающаяся тем, что, с целью повыиения точности, быстродействия и долговечности системы, в ней дополнительно установлены последовательно соединенные триггер и дифференцирующий блок, выход которого соединен с -входом детектора, а вход триггера подключен к выходу трехпозиционного релейного блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 391532, кл. G 05 В 11/16, 1971.
2.Авторское свидетельство СССР If 266019, кл. G 05 В 11/00, 1968.
3.Авторское свидетельство СССР 430352, кл. G 05 В 11/00, 1972 (прототип).
-KH
I
iX,
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
| Позиционный регулятор для систем с запаздыванием | 1987 |
|
SU1427328A1 |
| Устройство контроля тока регулятора нагрузки горной машины | 1981 |
|
SU1016504A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| Двухпозиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283711A1 |
| КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ | 2001 |
|
RU2187873C1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
-H 4
. ДДГТ M M
J
I L
