(54) РЕГУЛЯТОР НАГРУЗКИ ГОРНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Устройство для защиты от перегрузки двигателей горных машин | 1976 |
|
SU653671A1 |
| Устройство контроля тока регулятора нагрузки горной машины | 1981 |
|
SU1016504A1 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНОЙ лиШИНОЙ | 1972 |
|
SU347744A1 |
| Устройство стабилизации нагрузки выемочной машины | 1981 |
|
SU956785A1 |
| Устройство управления электромагнитной муфтой привода горной машины | 1984 |
|
SU1190027A1 |
| Способ управления нагрузкой угольного комбайна и устройство для его осуществления | 1988 |
|
SU1647135A1 |
| Способ автоматического управления режимом работы погрузочной машины с барабанно-лопастным исполнительным органом | 1979 |
|
SU866236A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
I
Изобретение относится к средствам автоматизации горных машин и может быть использовано для регулирования режимов работы их электродвигателей.
Известны регуляторы нагрузки горно машины, содержащие датчики нагрузки, схему сравнения, трехпозиционный релейный усилитель с отрицательной обратной связью и исполнительное устройство l .
Такие регуляторы не обеспечивают: автоматический выбор уставки регулирования по критерию динамичности нагрузки; селективную защиту регулируемых двигателей от опрокидывания при технологических перегрузках; коррекцию уставки при колебаниях напряжения питающей сети.
Известен также регулятор нагрузки горной машины, содержавши датчики нагрузки, схему сравнения, трехпозиционный .релейный усилитель с отрицательной обратной связью, блок адаптации и исполнительное устройство 2 .
Недостатки этого регулятора заключаются в том, что он не позволяет достичь максимальной производительности горной машины при одновременном ограничении динамичности ее нагрузок.
Цель предлагаемого изобретения повышение производительности и увеличение срока службы машины.
Эта цель достигается тем, что регулятор нагрузки снабжен блоками инерционной и безынерционной защиты, блоком технологических операций и узльм выбора мощности регулируемых двигателей, подключенным параллельно датчикам нагрузки через логические элементы ИЛИ, причем блоки безынерционной и инерционной защлт соединены последовательно и подключены к выходу схе«d сравнения, с которой через блок безынерционной защиты соединен блок адаптации, а блок технологических операций подключен к трехпозиционному релейному усилителю.
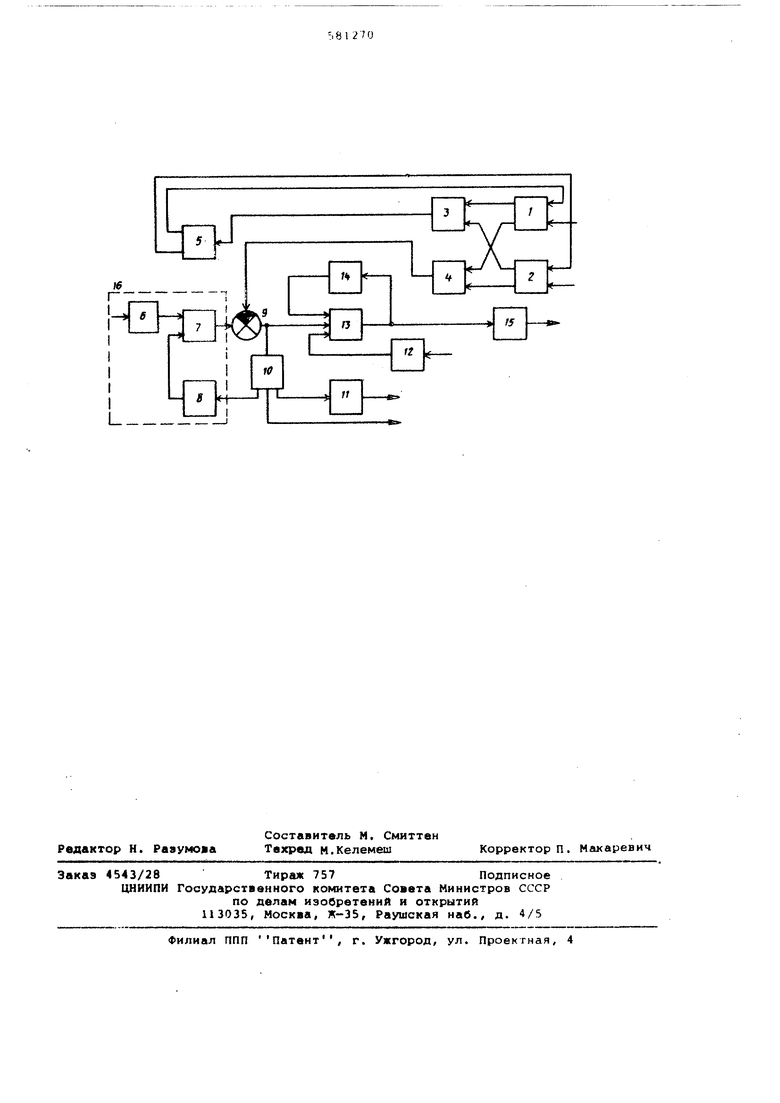
На чертеже представлена структурная схема регулятора.
Регулятор содержит датчики нагрузки 1, 2, логические элементы ИЛИ 3, 4 узел 5 выбора мощности регулируемых двигателей, элемент 6 коррекции устав по напряжению питающей сети, задатчик ycTeiBOK 7, управляющий элемент 8, схему сравнения 9, блоки 10 безынерционной и 11 инерционной защиты, блок 12 технологических операций, трехпозиционный релейный усилитель 13, охваченный званом 14 гибкой отрицательной обратной связи, и исполнительное устро ство 15. Элемент 6 коррекции уставки, задатчик уставок 7 и управляющий элемент 8 образуют блок адаптации 16. Регулятор нагрузки работает следую щим образом. Сигналы с датчиков нагрузки 1,2 через логический элемент 4 поступают на схему сравнения 9, где производится сравнение с сигналом задатчика уставок 7. Пропорционально величине и знаку сигнала рассогласования и в соответс .вии с типом команды от блока 12 технологических операций релейный усилитель 13 со звеном 1 гибкой отрицательной обратной связи формирует сигнал управления, в зависи мости от величины и знака которого ис полнительное устройство 15 производит изменение скорости подачи режущего органа машины, чем достигается поддержа ние среднегозначения нагрузки на заданном уровне. При пиковых перегрузкак, превышающих заданный уровень, срабатывает блок 10 безынерционной за щиты, выдающий команду на форсированный сброс скорости подачи режущего органа. Если в результате сброса скорости подачи опасный перегруз не будет устранен, то блок 11 инерционной защиты с заданной выдержкой времени отключит двигатели режущего органа горной машины. Этим обеспечивается надежная зашита двигателей режущего органа от опрокидывания при технологических перегрузках, что способствует улучшению качества управления нагрузкой, уменьшению ее динамичности и увеличе.нию срока службы машины. Блок адаптации 16 осуществляет автоматический выбор уставки регулирования по критерию динамичности нагруз ки с учетом колебаний напряжения питающей сети. Он работает следующим об разом. По сигналам блока 10 безынерци онной защиты управляющий элемент 8 оп ределяет показатель динамичности, про порционально величине и знаку отклонения которого от заданного значения, а также в соответствии с сигналом эле мента коррекции б задатчик уставок7 производит изменение уставок регулятора, поддерживая ее значение близким к максимально возможном , для данных реальных условий шахтной сети, так как показатель динамичности определяется, по величине допустимых перегрузок, выделенной блоком 10 безынерционной защиты. С помощью блока 12 технологических операций осуществляются необходимые блокировки и операции управления, например, сброс до нуля скорости подачи режущего органа при выключении в процесса-работы его двигателей, плавный подвод режущего органа к забою и забуривание, перевод машины с автоматического режима управления на ручной при моневренных операциях и т.п., что способствует уменьшению ди- наличности нагрузок машины в нетиповых режимах ее работы и увеличению срока ее службы. Перестройка входных цепей регулятора на требуемую мощность регулирув..1ЫХ и защищаемых двигателей (например, при применении регулятора на разных горных мгицинах) осуществляется с помощью узла 5 выбора мсхдности двигателей, подключенного к датчикам нагрузки -через логический элемент ИЛИ 3, что исключает влияние погрешности настройки входных цепей регулятора на качество управления нагрузкой. Формула изобретения Регулятор нагрузки горной машины, содержащий датчики нагрузки, схему сравнения, трехпозиционный релейный усилитель с отрицательной обратной связью, блок адаптации и исполнительное устройство, отличающийс я тем, что, с целью повышения производительности и увеличения срока службы машины, он снабжен блоками инерционной и безынерционной защиты, блоком технологических операций и узлом выбора мощности регулируемых двигателей, подключенным параллельно датчикам нагрузки через логические элементы ИЛИ, причем блоки безынерционной и инерционной защит соединены последовательно и подключены к выходу схемы сравнения, с которой через блок безынерционной защиты соединен блок адаптации/ а блок технологических операций подключен к трехпозиционному релейному усилителю. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство 391532; кл. G05 В 11/16, 1971. 2. Авторское свидетельство 354129, КЛ4 Ё 21 С 27/00, 1969.
