Изобретение относится к автоматическому контролю и может быть использовано для контроля параметров полупроводниковых узлов при их производстве.
Известны устройства для контроля . полупроводниковых узлов, содержащие систему контактирования зондами и измеритель, оптическую систему, предметный стол для закрепления пластин, снабженный механизмом шагового перемещения по взаимно перпендикулярным осям. В известных устройствах контроль проверяемых узлов осуществляется по следующему циклу: опускание зондовых головок на проверяемый узел, крнтактирование и контроль, подъем зондовых головок и перемещение по соответствующей оси к следующему узлу .1.
Однако производительность зондовых установок, работающих, по такому циклу, низка.
Наиболее близким к предлагаемому по технической сущности является уст-. ройство, содержащее систему контактирования зондами и измеритель, оптическую систему, предметный стол для закрепления пластин, снабженный механизмом шагового перемещения.
усилитель привода шаговых двигателей, усилитель привода зондовых головок, формирователь сигналов задержки, связанный с ус.илителем привода зондовых головок и пусковым устройством, подключенным к распределителю сигналов управления шагов лми двигателями, связанному с усилителем шаговых двигателей 2j.
10
Недостатком устройства является ограниченная производительность, обусловленная низким быстродействием.
Цель изобретения - повышение бы15стродействия устройства.
Указанная цель достигается тем, что устройство для контроля полупроводниковых узлов, содержащее предметный стол, соединенный с осями
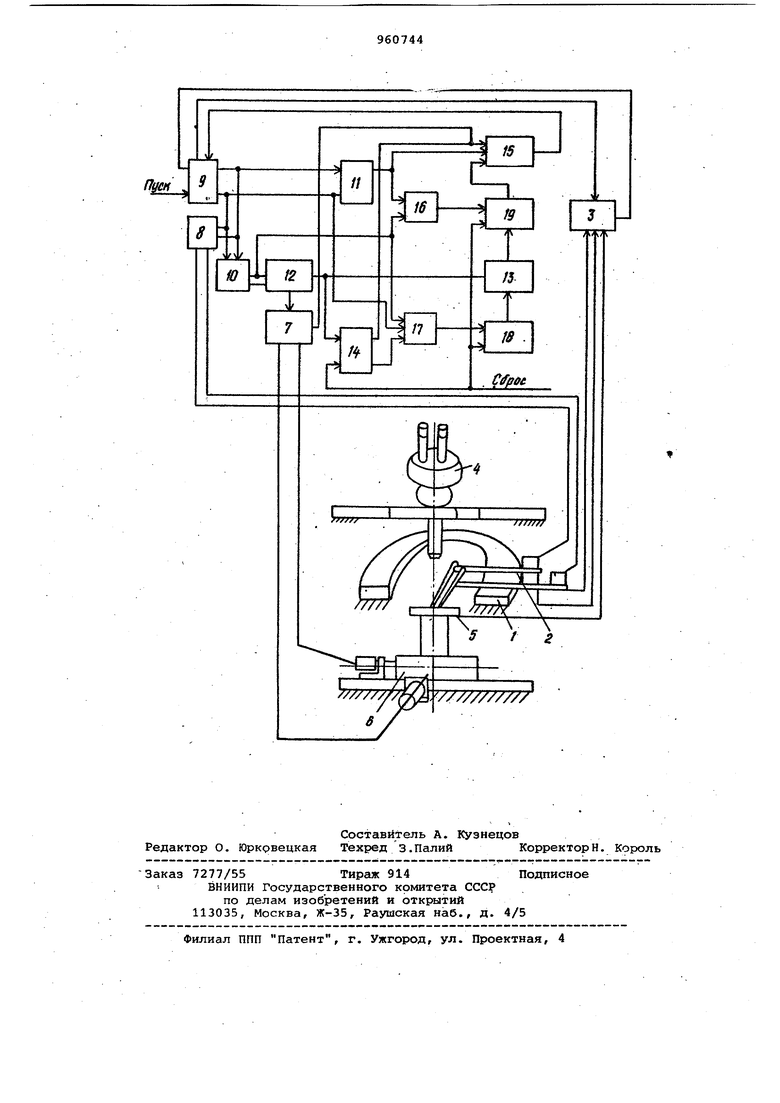
20 механизма шагового перемещения, управляющие входы которого подключены к соответствующим выходам первого усилителя, кольцо, на котором установлены зондовые головки, управ25ляющие входы опускания которых соединены с соответствующими выходами второго усилителя, а измерительные выходы - с соответствующими первыми входами измерителя, второй вход ко30торого соединен с измерительным выхо дом предметного стола, оптический узел, установленный в зоне оптической связи с контролируемым полупроводниковым узлом, расположенным на предметном столе, формирователь сигналов задержки, первый и второй выходы которого соединены с соответствующими входами второго усилителя и формирователя импульсов, тре ;тий выход - с управляющим входом из мерителя, выход которого подключен к первому входу формирователя сигналов задержки, второй вход которог является управляющим входом устройства, частотный выход формирователя импульсов соединен с входом распределителя сигналов, первый и второй выходы которого подключены к первом входу первого усилителя и к управля щему входу формирователя импульсов, содержит первый.и второй триггеры, первый и второй элементы И, счетчик регистр, блок ключей, элемент И-НЕ и реверсивный счетчик, 5 становочный вход которого соединен с установочными входами счетчика-регистра, второго .триггера и является установочным входом устройства, управляющ вход подключен к выходу первого эле мента И, счетный вход - к выходу бл ка ключей, а выход - к первому входу элемента И-НЕ, второй вход котор го соединен с выходом первого триггера и с первым входом,первого элемента И, третий вход - с прямым выходом второго триггера и с вторым входом первого усилителя, выход - с третьим входом формирователя сигналов задержки, третий выход распределителя сигналов соединен с первым входом блока ключей и с единичным входом второго триггера, инверсный выход которого соединен с первым вх дом второго элемента И, второй вход которого подключен к второму выходу формирователя сигналов задержки и к первому входу первого триггера, третий вход - к выходу формировател импульсов и к второму входу первого элемента И, выход - к счетному входу счетчика-регистра, второй вход первого триггера соединен с первым выходом формирователя сигналов задержки. На чертеже представлена схема устройства для контроля полупроводниковых узлов. Устройство содержит кольцо 1 с установленными на нем зондовыми головками 2, подключенными к измерителю 3, оптический узел 4, предметный стол 5, снабженный механизмом 6 шагового перемещения, первый усилитель 7, второй усилитель 8, формирователь 9 сигналов задержки, форми рователь 10 импульсов, первый триггер 11,.эаспределитель 12 сигналов, блок 13 ключей, второй триггер 14, логический элемент И-НЁ 15, логические элементы И 16 и 17, счетчик-регистр 18 и реверсивный счетчик 19. Полупроводниковая пластина, закрепленная на предметном столе 5, перемещается по взаимно перпендику- . лярным осям Х(У) с помощью механизма б шагового перемещения и контактирует с зондовыми головками 2, за крепленными на кольце 1 и перемещаемыми по ОСИ Z. Суммарное время, затрачиваемое на перемещение шагового механизма по оси Х(У) на шаг В 1 мм, подъем и опускание зондовых головок по оси Z без учета времени на измерение характеризует быстродействие устройства. Ориентация контактных площадок полупроводниковых узлов относительно игл зондовых головок 2 осуществляется оператором с помощью оптического узла 4. После ориентации игл зондовых головок 2 переходят к автоматическому режиму контроля узлов . полупроводниковой пластины. Направ- . ленйе обхода пластины. Начиная с первого узла, устанавливается заранее. При переключении установки в автоматический режим формируется сигнал Сброс, устанавливающий счетчик-регистр 18, реверсивный счетчик 19 и триггер 14 в исходное состояние. По сигналу Пуск формирователь 9 вырабатывает отрицательный импульс, поступающий на усилитель 8, формирователь 10, на второй вход триггера 11 и вход логического элемента И 17. При этом происходит следующее. По сигналу усилителя 8 зондовые головки. 2 опускаются на проверяемый узел. Триггер 11 устанавливается в положение , при котором с его выхода запрещается работа логического элемента И-НЕ 15 и логического элемента И 16. Запрещается работа логического элемента И 17. Формирователь 10 начинает вырабатывать импульсы стабильной частоты. Однако пос.кольку работа логических элементов И 16 и 17 запрещена, эти импульсы на счетчик-регистр 18 и реверсивный счетчик 19 не проходят. Кроме того, в исходном состоянии с прямого выхода триггера 14 запрещается работа усилителя 7, и поэтому перемещения по оси Х(У) не происходит. В случае, если время отработки шага перемещения по оси Х(У) больше времени опускания зондовых головок (длительности отрицательного импульса ), работа далее будет происходить следующим образом. По окончании дей-. ствия отрицательного импульса с Формирователя 9 сигналов задержки (задний фронт импульса) на измеритель 3 поступает сигнал начала измерения и снимается запрет с логического элемента И 17, чем обеспечивается прохождение импульсов стабильной частоты на счетчик-регистр 18. Поступление импульсов на счетчик-регистр 18 и распределитель 12 происходит до момента формирования в распределителе 12 сигнала окончания отработки шага. По этому сигналу с выхода распределителя 12 происходит выключение формирователя 10 и переключение триг.гера 14, в результате чего с его прямого выхода снимается запрет с усилителя 7 и подготавливается к работе логический элемент И-НЕ 15, а с инверсного - запрещается работа логического элемента И 17. Кроме того, на время дейстрия сигнала окончания отработки шага отпирается блок 13 ключей и происходит перезапись содержимого счетчика-регистра 18 в реверсивный счетчик 19. Записанное в реверсивном счетчике 19 число импульсов представляет собой разницу между временем отработки шага и временем опускания зондовых головок.
По окончании измерения полупроводникового узла с измерителя 3 подается сигнал на формирователь 9 сигналов задержки. Формирователь, 9 сигналов задержки вырабатывает отрицательный импульс, поступающий на усилитель 6 привода зондовых головок, формирователь 10 и триггер 11. При этом запрещается работа формирователя 10, поднимаются зондовые головки 2 и переключается триггер 11, в результате чего подготавливаются к работе логический элемент И-НЕ 15 и логический элемент И 16. По окончани действия отрицательного импульса (задний фронт) включается формирователь 10 и импульсы стабильной частоты Начинают поступать на счетный вход реверсивного счетчика 19 и череэ распределитель 12 на усилитель 7. Поскольку запрет с усилителя 7 снят, начинается перемещение стола 5 по оси Х(У). В момент уменьшения содержимого реверсивного счетчика 19 до нуля с его выхода снимается за.прет с логического элемента И-НЕ 15 и на вход формирователя 9 поступает сигнал. По приходу этого сигнала на выходе формирователя 9 появляется отрицательный импульс, который поступает на усилитель 8 и триггер 11, устанавливая его в исходное состояние, благодаря чему запрещается работа логического элемента И-НЕ 15 и логического элемента-И 16. При этом одновременно с перемещением по оси Х(У.) происходит опускание зондовых головок. Однако опускание зондовых головок на проверяемую структуру вседа заверааается после окончания перемещения по оси Х(.У), поскольку длительность импульса задержки на опускание зондовой головки устанавливается меньше реального времени ее опускания. По сигналу окончания отработки шага с распределителя 12 запрещается работа формирователя 10 и, |кроме того, на время действия этого сигнсша отпирается блок 13 ключей и записанное ранее число импульсов снова переписывается из счетчика-регистра 18 в реверсивный счетчик 19.
0 Далее цикл работы повторяется вплоть до окончания проверки последнего узла на пластине.
Работа зондовой установки при условии, что время опускания эондовой головки больше времени отработки ша5га по оси Х(У), происходит аналогично с учетом того, что при этом в счетчик-регистр 18 импульсы записываться не будут и, привод опускания зондовых головок 2 всегда будет включаться одновременно с приводом перемещения по оси Х(У)..
Таким образом, по сигналу Пуск в счетчике-регистре 18 рднок13атно запоминается разница между временем
5 отработки шага по оси Х(У) и. временем опусканиязондовых головок 2, которая затем перед каждым циклом переписывается в реверсивный счетчик 19. При включении привода по оси
0 Х(У), в момент обнуления реверсивного счетчика 19 параллельно в работу включается привод опускания зондовых головок 2, благодаря чему сокращается время каждого цикла работы
5 установки и тем повышается ее быстродействие.
Формула изобретения
- Устройство для кон.троля полупро-. водниковых узлов, содержащее предметный стол, соединенный с осями механизма шагового перемещения, управляющие входы- которого подключены к соответствующим выходам первого усилителя, кольцо, на котором установлены зондовые головки, управляющие входы опускания которых соединены с соответствующими выходами второго усилителя, а измерительные выходы - с соответствующими первыми входами измерителя, второй вход которого соединен с измерительным выходом предметного стола, оптический узел, установленный в зоне оптической связи с контролируемым полупроводниковым узлом, расположенным на предметном столе, формирователь сигналов задержки, первый и второй выходы которого соединены с соответствующими входами второго усилителя и формирователя импульсов, третий выход - с управляющим входом измерителя, выход которого подключен к. первому входу формирователя сигна10В задержки, второй вход которого является управляющим входом устройстпа, частотный выход формирователя импульсов соединен с входом распределителя сигналов, первый и второй выходы которого подключены к первому входу первого усилителя и к управлякицему входу формирователя импульсов, отличающееся тем, что, с делью повышения быстродействия устройства, оно содержит первый и второй триггеры, первь1й и второй элементы И, счетчик-регистр, блок ключей, элемент И-НЕ и реверсивный счетчик, установочный вход которого соединен с установочными входами счетчика-регистра, второго триггера и является установочным входом устройства, управляющий вход подключен к выходу первого элемента И, счетный вход -. к выходу блока ключей, а выхо к первому входу элемента И-НЕ, второй вход которого соединен с выходом первого триггера и с первым входом первого элемента И, третий вход - с прямым выходом второго триггера и с
вторым входом первого усилителя, выход - с третьим входом формирователя сигналов задержки, третий выход распределителя сигналов соединен с первым входом блока ключей и с еди-. ничным входом второго триггера, инверсный выход которого соединен с первым входом второго элемента И, второй вход которого подключен к второму выходу формирователя сигналов Зсщержки и к первому входу первого триггера-, третий вход - к выходу формирователя импульсов и к вторму входу первого элемента И, выход к счетному входу счетчика-регистра, второй вход первого триггера соединен с первым выходом формирователя сигналов задержки.
Источники информации, принятые во внимание при экспертизе
1.Патент США .093, кэт. 324-158 F, опублик. 1976.
2.Техническое описание 2.688.010 ТО автомата зондового 14 км - 3000 013. Рига, 1978 (прототип). /fe -5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля полупроводниковых структур | 1981 |
|
SU1001238A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1992 |
|
RU2037264C1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ ДАВЛЕНИЕМ | 1989 |
|
SU1658510A1 |
| Устройство для сварки давлением | 1987 |
|
SU1459864A1 |
| Устройство для управления электродвигателем постоянного тока | 1987 |
|
SU1608776A1 |
| Устройство для суммирования двухиМпульСНыХ пОСлЕдОВАТЕльНОСТЕй | 1978 |
|
SU809179A1 |
| Голографическое постоянное запоминающее устройство | 1990 |
|
SU1725258A1 |
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Устройство для сварки давлением | 1986 |
|
SU1397222A1 |
| Устройство для ультразвуковой сварки | 1989 |
|
SU1673347A1 |