Изобретение относится к электронике и может быть использовано в автоматах зондового контроля и измерения параметров полупроводниковых структур на пластине.
Известна зондовая установка для контроля полупроводниковых структур на пластине, включ-аклдая оптическую систему, предметный стол для закрепления пластины, снабженный приводом перемещения по оси Z, механизм шагового перемещения стола по оси X (.У) устройство пуска, связанное с приводом перемещения по оси.2 и приводом механизма шагового перемещения стола по оси X (У), и зондовые головки, подключенные к блоку контроля 1 .
Недостатком указанной зондовой установки является то, что она не обеспечивает стабильности качества контактирования при измерении профиля пластины, кроме тоуо, контроль структур производится по заданному циклу: подъем предметного стола с iпластиной по оси 2 в верхнее положе ние, контактирование зондовых головок с проверяемыми структурами и их контроль, опускание предметного стола с пластиной в нижнее положение
и перемещение его по оси X У ) с помощью шагового механизма для контроля следующих структур. Суммарное время, затрачиваемое на перемещение шагового механизма по оси X (,У }, подъем и опускание предметного стола, без учета времени на измерение, характеризует кинематическую производительность .зондовой установки.
10
Наиболее близким по технической сущности к предлагаемому является устройство для контроля полупроводниковых структур, содержащее предметный
15 стол, блоки приводов механизмов вертикального перемещения предметного стола, зондовые головки, закрепленные на зондовом кольце, подключены к входам блока контроля, выход ко20торого соединен с первым входом бло ка привода механизма вертикального перемещения, блок пуска, первый вход и первый выход которого подключены соответственно к второму выходу и 25 второму входу блока привода механизма вертикального перемещения, первый оптоэлектрический датчик со шторкой, закрепленной на предметном столе, соединенный с первым входом тригге-.
30 ра, контактный датчик, подключенный
к первому входу первой схемы совпадения 2.
Цель изобретения - повьаиение производительности устройства.
Поставленная цель достигается тем, что в устройство для контроля полупроводниковых структур, содержащее предметный стол, блоки приводов механизмов вертикального перемещения и шагового горизонтального перемещения предметного стола, зондо вые головки, закрепленные на зондовом кольце, подключены к входам блока контроля, выход которого соединен с первым входом блока привода механизма вертикального перемещения, блок пуска,-первый вход и первый выход которого подключен соответственно к второму выходу и второму входу блока привода механизма вертикального перемещения, первый оптоэлектрический датчик со шторкой, закрепленной на предметном столе, соединенный с первым входом триггера контактный датчик, подключенный к первому входу первой схемы совпадения, введены второй оптоэлектрический датчик, вторая схема совпадения и инвертор, при этом .второй оптоэлектрический датчик подключен к второму входу триггера, первый выход которого соединен с вторым входом первой схемы совпадения, а второй выход соединен с первым входом второй схемы совпадения, второй вход которой через инвертор подключен к контактному датчику, а третий вход соединен с выходом блока пуска, выход второй схемы совпадения подключен к входу 6jiOKa привода механизма шагового горизонтального перемещения, третий вход первой схемы совпадения соединен с блоком привода механизма вертикального перемещения, а ее выход соединен с входом блока контроля.
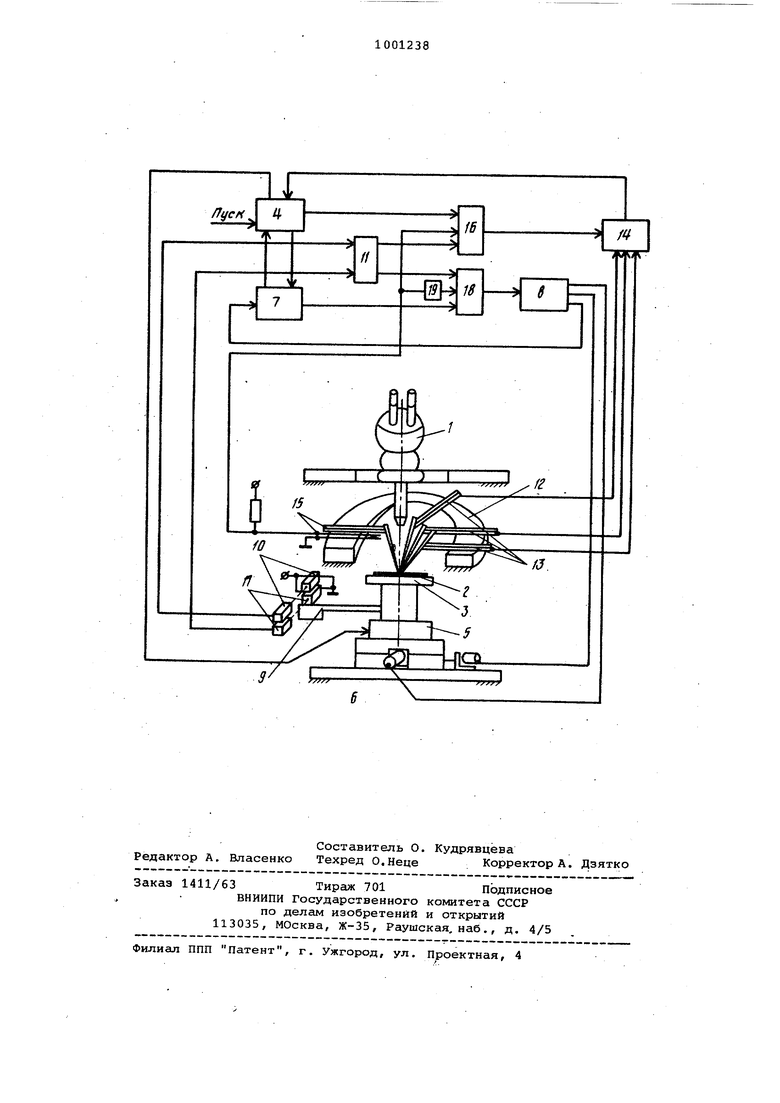
На чертеже представлена схема устройства для контроля полупроводниковых структур. .
Устройство для контроля полупроводниковых структур содержит оптическую систему 1, предметный стол 2 с закрепленной на нем пластиной 3, снабженный блоком 4 привода механизма верт 1кального перемещения с электромагнитом 5, механизм 6 шагового горизонтального перемещения стола 2, блок 7 пуска, связанное с блоком 4 привода механизма вертикального перемещения стола 2, и блоком 8 привода механизма 6 шагового горизонтального перемещения стола 2, шторку 9, закрепленную на предметном столе 2 и взаимодействующую с первым оптоэлектричёским датчиком 10 рабочего положения стола 2, подключенным к одному из входов триггера 11, установленные на зондовом кольце 12 зондовые головки 13, соединенные с блоком 14 контроля, связанным с блоком 4 привода вертикального перемещения, и контактный датчик 15, подключенный к одному из входов первой схемы 16 совпадения.
Устройство снабжено вторым оптоэлектрическим датчиком,17 уровня стола 2, второй схемой 18 совпадения и инвертором 19, причем оптоэлектрический датчик 17 уровня стола 2 подключен к
0 второму входу триггера 11, первый выход которого соединен с вторым входом первой схемы 16 совпадения,а второй выход связан с первым входом второй схемы 18 совпадения, второй
5 вход которой через инвертор 19 подключен к контактному датчику 15, третий вход связан с выходом блока 7 пуска, а выход второй cxeNSj 18 совпадения подключен к блоку 8 привода механизма 6 шагового горизонтального перемещения стола 2, при этом третий вход первой схемы 16 совпадения соединен с блоком 4 привода механизма вертикального перемещения, а ее выход подключен к блоку 14 контроля. Ориентация контактных площадок полупроводниковых структур пластины 3 относительно игл зондовых головок 13 осуществляется оператором с помощью оптической системы 1. После
0 ориентации игл зондовых головок 13 переходят к автоматическому режиму работы. По сигналу Пуск с выхода блока 4 привода механизма вертикального перемещения на электромагнит
5г 5 поступает сигнал включения. Электромагнит 5 срабатывает и предметный стол 2 поднимается в верхнее положение. При этом размыкается контактный датчик 15, благодаря чему
0 подготавливается к работе первая схема 16 совпадения. Шторка 9, закрепленная на предметном столе 2, выключает оптоэлектрический датчик 10 рабочего положения стола 2, выходе ной сигнал которого включает триггер 11. Выходной сигнал триггера 11 подготавливает к работе схему 16 совпадения по второму входу. С вь1хода блока 4 привода механизма вертикального перемещения на третий вход схемы 16 совпадения поступает сигнал начала измерения. На выходе первой схемы 16 совпадения формируется сигнал, включающий блок 14 контроля. Начинается процесс измерения, пос5 ле окончания которого с выхода блока контроля 14 на вход блока 4 привода механизма вертикального перемещения поступает сигнал окончания измерения. По этому сигналу с выходов бло0 ка 4 привода механизма вертикального перемещения запрещается работа схемы 16 совпадения, включается генератор бло.ка 7 пуска, подающий импульс с частотой на третий вход второй
5 схемы 16 совпадения и обесточивается электромагнит 5, начинается опускание предметного стола 2. При опускании предметного стола 2 размыкается контактный датчик 15, через ин вертор 19 разрешается работа схемы 18 совпадения по второму входу. В момент выключения шторкой 9 датчика 17 уровня стола 2 поступает сигнал начала перемещения предметного стол 2 по оси X .У ). Этот сигнал разреша ет работу второй cxeN 18 совпадения по первому входу, что обеспечивает прохождение импульсов с частотой i генератора блока 7 пуска на блок 8 привода механизма б шагового горизонтального перемещения, проис кодит одновременное опускание стола и его перемещение по оси X ( У ) на Заданный шаг. После окончания перем щения по оси X ( У ) заканчивается ци работы устройства по проверке перво полупроводниковой структуры. На вход блока 7 пуска с блока 8 привода мех низма 6 шагового горизонтального пе ремещения стола 2 поступает сигнал окончания перемещения, который выключает генератор импульсов блока 7 пуска и формирует сигнал пуска на блок 4 привода механизма вертикального перемещения для начала второго цикла работы. В дальнейшем цикл работы устройст ва повторяется до окончания контроля последней полупроводниковой структуры на пластине 3. Таким образом в устройстве осуществляется совмещенное опускание и перемещение предметного стола 2, благодаря чему сокращается непроизвольное время цикла и повышается кинематическая производительность. Формула изобретения Устройство для контроля полупроводниковых структур, содержащее пред метный стол, блоки приводов механизмов вертикального перемещения предметного стола и шагового горизонтального перемещения предметного стола, зондовые головки, закрепленные на зондовом кольце, подключены к входам блока контроля, выход которого соединен с первым входом блока привода механизма вертикального перемещения, блок .пуска, первый вход и первый выход которого подключены соответственно к второму выходу и второму входу блока привода механизма вертикального перемещения, первый оптоэлектричсский датчик со шторкой, закрепленной на предметном столе, соединенный с первым входом триггера контактный датчик, подключенный к первому входу первой схемы совпадения, отличающееся тем, -ЧТО, с целью повышения производительности устройства, в него введены второй оптоэлектрический датчик, вторая схема совпадения и инвертор, при этом второй оптоэлектрический датчик подключен к второму входу триггера, первый выход которого соединен с вторым входом первой схемы совпадения, а второй выход соединен с первым входом второй схемы совпадения, второй вход которой через инвертор подключен к контактному датчику, а третий вход соединен с выходом блока пуска, выход второй cxeNtJ .совпадения подключен к входу блока привода механизма шагового горизонтального перемещения, третий вход первой схемы -совпадения соединен с блоком привода механизма вертикального перемещения, а ее выход соединен с входом блока контроля. Источники информации, принятые во внимание при экспертизе 1.Патент США 3437928, кл. 324-158, 1969. 2.Патент США 3996517, кл. 324-158, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля полупроводниковых узлов | 1981 |
|
SU960744A1 |
| Устройство для контроля электрических параметров полупроводниковых и магнитных структур на пластине | 1982 |
|
SU1064497A1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ ДАВЛЕНИЕМ | 1989 |
|
SU1658510A1 |
| Устройство для измерения геометрических параметров полупроводниковых пластин | 1989 |
|
SU1763873A1 |
| Устройство для монтажа проволочных перемычек | 1986 |
|
SU1430214A1 |
| Машина для многоточечной контактной сварки | 1979 |
|
SU867563A1 |
| Устройство для контроля металлизированных переходов печатной платы | 1985 |
|
SU1308955A1 |
| Устройство для сварки давлением | 1983 |
|
SU1184630A1 |
| Устройство для ультразвуковой сварки | 1989 |
|
SU1673347A1 |
| Автомат для присоединения проволочных выводов полупроводниковых приборов | 1987 |
|
SU1481871A1 |