Изобретение относится к радибтехнике, в частности к радиолокации, и может быть использовано в системах управления воздушным движением
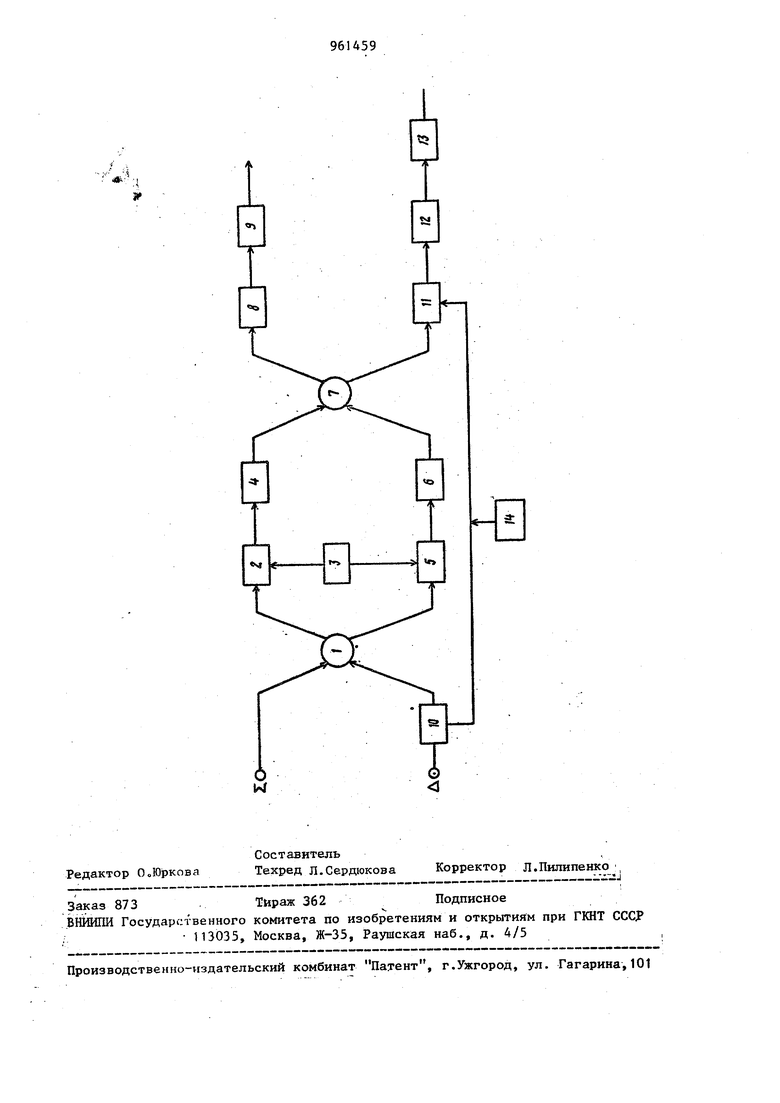
Известно приемное устройство вто- ричного моноимпульсного .радиолокатора, содержащее первьш суммарно-разностный преобразователь, первый вход которого является первым входом устройства, соединенные последовательно первый смеситель, первый вход которого соединен с суммарным выходом первого суммарно-разностного преобразователя,, и первый усилительограничитель промежуточной частоты, соединенные последовательно второй смеситель, первый вход которого соединен .с разностным выходом первого суммарно-разнрстного преобразователя, и второй уснлитель-ограничи-. тель промежуточной частоты, второй Суммарно-разностный преобразователь, первый и второй входы которого соединены соответственно с выходами первого и второго усилителей-ограничителей промежуточной частоты, гетеродин первый и втО:рой выходы которого соединены соответственно с вторыми входами первого и второго смесителей, первый и второй детекторы, выходы которых являются выходами устройства. Однако известное приемное устройство имеет большие аппаратурные ошибки вследствие фазовой нестабильности приемных каналов, Цель изобретения - повьш1ение точности измерения азимутального утла, Для этого в приемное устройство вторичного моноимпульсного радиолокатора, содержащее первый суммарно-разностный преобразователь, первый вход которого является первым входом устройства, соединенные последовательно первый смеситель, первый вход которог,9 соединен с суммарным выходом первого суммарно-разностного преобразователя, и первьй усилитель-ограничитель промежуточной частоты, соединенные последовательно второй смеситель первый вход которого соединен с разностным выходом первого суммарно-разностного преобразователя, и второй усилитель-ограничитель промежуточной частоты, второй суммарно-разностный преобразователь, первый и второй входы которого соединены соответственно с выходами первого и второго усилителей-ограничителей промежуточной часто ты, гетеродин, первый и второй выходы которого соединены соответственно с вторыми входами первого и второго смесителей, первый и второй.детекторы выходы которого являются выходами устройств а, введены первый фазовый манипулятор, первьш вход которого является вторым входом устройства, а 9 выход соединен с вторым входом первого суммарно-разностного преобразователя, первый линейный фильтр, вход которого соединен с суммарным выходом второго суммарно-разностного преобразователя, а выход - с входом первого детектора, соединенные последовательно второй фазовый манипулятор, вход которого соединен с разностным выходом второго суммарно-разностного преобразователя, и второй линейный фильтр, выход которого соединен с входом второго детектора, формирователь сигнала манипуляции, выход которого соединен с вторыми входами первого и второго фазовых манипуляторов. На чертеже представлена структурная злектрическая схема предлагаемого приемного устройства о Приемное устройство содержит первый суммарно-разностный преобразователь 1, первьш смеситель 2, гетеродгш 3, первый усилитель-ограничитель 4 промежуточной частоты, второй смеситель 5, второй усилитель-ограничитель 6, второй суммарно-разностный преобразователь 7, -первый линейный фильтр 8, первый детектор 9, первый фазовый манипулятор JO, второй фазовый манипулятор i1, второй линейный фильтр 12, второй детектор 13 и формирова-.. тель 14 сигнала манипуляции Приемное устройство вторичного моноимпульсного радиолокатора работает следующим образом. На первый и второй входы приемного устройства от антенно-фидерной системы радиолокатора поступают соответственно суммарный и разностный сигналы, сдвинутые относительно друг друга на 90, причем на второй вход первого суммарно-разностного преобразователя 1 сигнал поступает через пер-. вый фазовый манипулятор, на выходе которого фаза сигнала периодически . изменяется на JSO. В результате манипуляции фазы разностного сигнала на выходах первого суммарно-разностного преобразователя образуются соот- ветственно суммарный и разностньй фазоманипулированные сигналы, которые преобразуются посредством соответствующих смесителей 2 и 5 и гетеродина 3 в фазоманипулированные сигналы про межу точной час то ты, которые затем уси-; ливаются и ограничиваются соответствук л }алк усилителями-ограничителями
596
4 и 6. При преобразовании и усилении меядцу разностным и суммарным скгна- лами образуется неучтенная разность фаз, обусловленная разными фазовы- . ми задержками разных каналов усиления и нестабильностью so времени фазовых задержек каналов,-которые в основном и определяют аппаратурную погрешность измерения азимутального угла, Второй суммарно-разностный преобразователь 7 производит обратное суммарно-разностное преобразование сигнала, при этом на его разностном выходе сигнал приобретает дополнительную амплитудную модуляциюj обусловленную фазовой нестабильностью приемных каналов, причем чем больше нестабильность, тем больше амплитудная модуляция сигнала на разностном выходе преобразователя. Далее фазоманипулированный сигнал второго суммарно-разностного преобразователя проходит второй фазовый манипулятор 1 , работающий синхронно с первым фазовым манипулятором 10, деманипулируется. Тов. превращается, из фазоманипулированного сигнала в гладкий непрерывный сигнал, модулированный только по амгшитуде, спектр которого сужается до величины, равной первоначальному спектру сигнала, тогда как при первой фазовой манипуляции спектр сигнала расширяется, что приводит к згкудшению отношения сигнал-шум. ; После фильтрации сигнала линейным фильтром, согласованным со спектром сигнала, происходит восстановление. пе{)воначального соотношения сигнал/
596
/шум. Затем снгнаи детектируется де-. тектором 13, постоянная времени которого значительно больше периода манипуляции, благодаря чеьгу сигнал не только детектируется, но и усредняется, при этом амплитуда усредненного значения импульса на выходе детектора определяется как среднеарифметическое
Q значение амплитуды сигнала за время действия всех периодов манипуляции фазы в импульсе, при этом величина ре- . зультирующей ошибки при измерении амплитуды импульса практически не завиr сит-,.от дополнительного фазового угла, обусловленного фазовой нестаб1шьностью приемных каналов
Полосы пропускания отдельных функн ональных блоков приемного устройства
0 выбираются в соответствии со спектрами передаваемых сигналов. При экспериментальной проверке предложенного приемного устройства при несущей частоте сигнала, равной 740 мГц, длительности импульса 1 мкс и частоте следования импульсов 500 мГц, выбрана частота фазовой манипуляции 20 мГц, полоса пропускания усилителей-ограничителей промелсуточной частоты 60 мГц и
0 полоса линейных фильтров 10 мГц,
Технико-экономический эффект предложенного приемного устройства заключается в снижении требований к фазовой нестабильности приемных устройств при их изготовлении без снижения точ ности измерения азимутального угла при работе вторичного моноимпул.ьсного .радиолокатора
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1995 |
|
RU2079859C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| КОРОТКОИМПУЛЬСНЫЙ МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ОДНОЙ ПЛОСКОСТИ | 2011 |
|
RU2460089C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2017 |
|
RU2659807C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| РАДИОЛОКАЦИОННАЯ МОНОИМПУЛЬСНАЯ АМПЛИТУДНАЯ СУММАРНО-РАЗНОСТНАЯ СИСТЕМА | 2022 |
|
RU2793137C1 |
| ПРИЕМНОЕ УСТРОЙСТВО ДЛЯ МОНОИМПУЛЬСНОГО РАДИОЛОКАТОРА | 2003 |
|
RU2251122C1 |
ПРИЕМНОЕ УСТРОЙСТВО ВТОРИЧНОГО МОНОИМПУЛЬСНОГО РАДИОЛОКАТОРА , содержащее первый суммарно-разностный преобразователь, первьш вход которого является первым йходом устройства, соединенные последовательно первый смеситель, первый вход которого соединен с суммарным выходом первого суммарно-разностного преобразователя, н первьй усилитель-ограничитель промежуточной частоты, соединенные последовательно второй смеситель, первый вход которого соединен с разностнбтм выходом первого суммарно-разностного преобразователя, и второй усилитель-ограничитель проме- . жуточной частоты, второй суммарный разностный преобразователь, первый ,и второй входы которого соединены со2 ответственно с выходами первого и второго усилителей-ограничителей промежуточной частоты, гетеродин, первый и второй выходы которого соединены соответственно с вторыми входами первого и второго смесителей, первый и второй детекторы, выходы которых являются выходами устройства, отличающееся тем, что, с целью повышения точности измерения азимутального угла, в него введены первый фазовый манипулятор, первый вход которого является вторым входом устройства, а выход соединен с вторым входом первого суммарно- разностного преобразователя, первый линейный фильтр, вход которого соединен с сум. марным выходом второго суммарно-разW ностного преобразователя, а выход - с входом первого детектора, соединенные последовательно второй фазовый манипулятор, вход которого соединен с разностным выходом второго суммар) но-разностного преобразователя, вто35 рой линейный фильтр, выход которого соединен с входом, второго детектора, 4 СП и формирователь сигнала манипуляции, вбтход которого соединен с вторыми входами первого и второго фазовых манипуляторов.- .
| Кагр D.and Woda M,L | |||
| Discrete VAddressi Beacon System (DABS) | |||
| Monopulse Summery - Massuchusetts Institute of Technology Lincoln Laboratory Lexgtioti, Massuchusetts, USA, 1977, № FPA-RD76-21 9j p.p | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
