Изобретение относится к радиотехнике и может быть использовано для одноканального приема сигналов и выделения угловой информации в бортовых (установленных на летательных аппаратах) амплитудных суммарно-разностных моноимпульсных радиолокационных станциях (РЛС) сопровождения цели, использующих в интересах повышения помехозащищенности по отношению ко всем видам организованных ответных помех внутриимпульсную фазовую манипуляцию зондирующих сигналов двоичных многоразрядным кодом (М-последовательностью).
Использование одноканального приема сигналов в моноимпульсных РЛС сопровождения цели позволяет уменьшить инструментальные ошибки пеленгования, обусловленные неидентичностью амплитудно-фазовых характеристик приемных каналов [1, c. 183] . Одновременно в ряде случаев одноканальность приводит в снижению стоимости аппаратуры, уменьшению ее габаритов и массы.
Известна радиолокационная система [2], предназначенная для одноканального приема сигналов и выделения угловой информации в моноимпульсных РЛС сопровождения цели по одной из угловых координат. В известном устройстве объединение приемных каналов в один канал осуществляется по высокой частоте путем задержки одного из сигналов на время, превышающее длительность импульсов. Задержанный и незадержанный сигналы преобразуются по частоте, усиливаются в логарифмическом усилителе, детектируются и разделяются путем соответствующего временного стробирования. Разделенные сигналы сравниваются методом вычитания. С этой целью незадержанный сигнал задерживается на ту же величину, на которую была произведена задержка другого сигнала при объединении каналов.
Способ объединения каналов, реализованный в известном устройстве, снижает разрешающую способность РЛС по дальности. Кроме этого, известное устройство из-за громоздкости линии задержки не может быть использовано в бортовых РЛС, к которым предъявляются жесткие требования по массо-габаритным характеристикам.
Известна радиолокационная система [3], предназначенная для одноканального приема сигналов и выделения угловой информации в моноимпульсных РЛС сопровождения цели по обеим угловым координатам. В известном устройстве высокая частота каждого из сигналов (суммарного и двух разностных) преобразуется в разные промежуточные частоты с помощью отдельных гетеродинов различных частот. Все три сигнала усиливаются одним усилителем промежуточной частоты с достаточно широкой полосой пропускания. На выходе усилителя сигналы жестко ограничиваются и разделяются тремя узкополосными фильтрами. Затем все три сигнала преобразуются к одной частоте путем смещения двух из этих сигналов с сигналом, частота которого равна разности частот гетеродинов каждого из этих сигналов и гетеродина третьего сигнала.
В известном устройстве из-за жесткого ограничения сигналов на выходе усилителя промежуточной частоты возникает серьезная проблема перекрестной связи, в результате которой часть сигнала рассогласования по азимуту появляется на выходе детектора рассогласования по углу места и наоборот, что может явиться причиной значительных ошибок и повышенной чувствительности к помехам.
Наиболее близким по технической сути аналогом, принятым в качестве прототипа предлагаемого изобретения, является радиолокационная система [4]. Устройство-прототип содержит первый комплект из четырех двойных балансных смесителей (манипуляторов фазы), работающих как модуляторы, с помощью которых выполняется кодирование по фазе в цифровой форме четырех сигналов с выходов антенны. Первый комплект балансных смесителей питается модулирующими кодированными сигналами высокой частоты (сигналами кодового генератора). Кодовые группы, подаваемые на модуляторы, сдвигаются по времени относительно друг друга на величину, равную или превышающую длительность элемента кода, что практически исключает взаимодействие сигналов при их объединении. Выходные сигналы модуляторов, кодированные по фазе, суммируются по промежуточной частоте, после чего совокупность сигналов обрабатываются в одноканальном приемнике (линейном усилителе промежуточной частоты). С выхода приемника совокупность сигналов поступает на делитель мощности и далее на второй комплект из четырех двойных балансных смесителей (блок демодуляторов), работающих как демодуляторы и восстанавливающих структуру первоначальных сигналов. Извлечение угловой информации осуществляется в угловом процессоре (блоке выделения сигналов углового рассогласования).
Поскольку кодирование осуществляется в пределах длительности принимаемого импульса без дополнительных сдвигов по времени, то метод объединения приемных каналов, реализованный в известном устройстве, не приводит к ухудшению разрешающей способности по дальности, что характерно, например, для устройства [2]. Разрешающая способность по дальности остается такой же, какой она была в устройстве без объединения приемных каналов, и определяется длительность зондирующих импульсов.
Улучшение разрешающей способности по дальности (при неизменной дальности действия РЛС) за счет уменьшения длительности зондирующих посылок в импульсных РЛС возможно лишь путем увеличения импульсной мощности, что не всегда является приемлемым из-за энергетических ограничений и необходимости обеспечения высокой помехозащищенности.
Эффективным способом повышения помехозащищенности бортовых РЛС по отношению ко всем видам ответных помех является использование в качестве зондирующего излучения сигналов малой скважности и малой импульсной мощности.
Для обеспечения высокой разрешающей способности по дальности производства внутриимульсная фазовая манипуляция зондирующих сигналов двоичным многоразрядным кодом (М-последовательностью), которая в бортовых условиях является более предпочтительной, чем линейная частотная модуляция, по энергетическим соображениям и аппаратурной реализации.
Задачей изобретения является обеспечение одноканального приема сигналов с фазовой манипуляцией путем изменения фазы поочередно (с периодом повторения зондирующих посылок) у разностных сигналов азимута и угла места и последующего поочередного сложения разностных сигналов с суммарным сигналом по высокой частоте.
Выбор структурной схемы предлагаемой одноканальной моноимпульсной радиолокационной системе определения направления на цель основан на следующих предпосылках.
Объединение суммарного сигнала с разностными сигналами азимута и угла места осуществляется поочередно с периодом повторения зондирующих посылок с помощью первого манипулятора фазы путем изменения фазы разностного сигнала и последующего его сложения с суммарным сигналом по высокой частоте. Первый манипулятор фазы обеспечивает изменение фазы разностного сигнала таким образом, чтобы в каждый момент времени его фаза по отношению к фазе суммарного сигнала была сдвинута на 90 град.
Совокупность сигналов усиливается по высокой частоте, преобразуется путем переноса спектра сигналов из области высокой частоты в область промежуточной частоты и усиливается по промежуточной частоте.
Разделение усиленных сигналов осуществляется посредством их корреляционной обработки в два этапа: демодуляцией сигналов и их последующих интегрированием.
На первом этапе в квадратурных каналах формируются соответствующие аддитивные смеси из квадратурных составляющих фазоманипулированного суммарного (разностного) и демодулированного разностного (суммарного) сигналов. Для этого на фазовые детекторы, предназначенные для формирования смесей из квадратурных составляющих фазоманипулированного суммарного и демодулированного разностного сигналов, подаются ортогональные гармонические опорные напряжения промежуточной частоты, а на фазовые детекторы, предназначенные для формирования смесей из квадратурных составляющих фазоманипулированного разностного и демодулированного суммарного сигналов - ортогональные опорные напряжения с фазой, изменяемой в соответствии с кодом фазовой манипуляции вторым манипулятором фазы, работающим синхронно с первым.
На втором этапе разделения сигналов из смесей, сформированных на первом этапе, выделяются квадратурные составляющие демодулированных сигналов путем их накопления на интеграторах. Присутствующие в смесях квадратурные составляющие фазоманипулировованных сигналов в результате их накопления на интеграторах в сули свойств М-последовательности (число "единиц" больше числа "нулей" на единицу; псевдослучайность М-последовательности, в частности, свойство уравновешенности и свойство серий, т.е. как бы одинаковую вероятность появления "единиц" и "нулей", и то, что после появления "единицы" следующий элемент с равной вероятностью может быть как "единица", так и "нуль"), а также при соответствующем выборе постоянной времени интеграторов (она должна быть значительно больше длительности одного дискрета фазоманипулированного сигнала) оказывается практически полностью подавленными.
Разделенные квадратурные составляющие сигналов преобразуются в цифровой код и используются для выделения сигналов углового рассогласования, которые поочередно (синхронно с подключением разностных сигналов для объединения с суммарным сигналом на входе системы) подаются в соответствующие каналы углового сопровождения цели.
Сущность предлагаемого изобретения заключается в том, что в одноканальную моноимпульсную радиолокационную систему определения направления на цель, содержащую первый манипулятор фазы, сумматор, линейный усилитель промежуточной частоты, блок демодуляторов, блок выделения сигналов углового рассогласования и кодовый генератор, выход которого соединен с первым входом первого манипулятора фазы, выход которого подключен к первому входу сумматора, второй вход которого является входом суммарного сигнала системы, входами тактовых импульсов и кода фазовой манипуляции которой являются соответственно первый и второй входы кодового генератора, а выход линейного усилителя промежуточной частоты соединен с первым входом блока демодуляторов, дополнительно введены первый и второй коммутаторы, усилитель высокой частоты, смеситель, второй манипулятор фазы, блок интеграторов и блок формирования сигнала сопровождения по дальности. При этом первый выход блока формирования сигнала сопровождения по дальности является выходом суммарного сигнала системы, входами разностных сигналов азимута и угла места которой являются соответственно первый и второй входы первого коммутатора, выход которого подключен к второму входу первого манипулятора фазы. Выход сумматора соединен с входом усилителя высокой частоты, выход которого подключен к первому входу смесителя, выход которого соединен с первым входом линейного усилителя промежуточной частоты, второй вход которого подключен к первому выходу блока формирования сигнала сопровождения по дальности. Второй вход смесителя является входом сигнала гетеродина системы, входом опорного сигнала которой являются второй вход блока демодуляторов и первый вход второго манипулятора фазы, второй вход и выход которого подключены соответственно к выходу кодового генератора и третьему входу блока демодуляторов, первый, второй, третий и четвертый выходы которого соединены с соответствующими входами блока интеграторов, первый и второй выходы которого подключены к соответствующим входам блока формирования сигнала сопровождения по дальности и блока выделения сигналов углового рассогласования, третий и четвертый входы которого соединены с соответствующими выходами блока интеграторов, пятый вход которого является входом строба дальности цели системы, входом тактовых импульсов которой являются третий вход первого коммутатора и первый вход второго коммутатора, второй вход которого подключен к выходу блока выделения сигналов углового рассогласования, пятый вход которого соединен с вторым выходом блока формирования сигнала сопровождения по дальности. Первый и второй выходы второго коммутатора являются выходами соответственно азимутального и угломестного сигналов рассогласования системы, входом сигнала обнаружения цели и выходом квадратурных составляющих фазоманипулированного суммарного сигнала которой являются соответственно шестой вход блока выделения сигналов углового рассогласования и пятый выход блока демодуляторов.
Блок демодуляторов содержит два фазовращателя, четыре фазовых детектора, две разделительные емкости и четыре видеоусилителя, выходы которых являются соответствующими выходами блока демодуляторов, первым входом которого являются первые входы фазовых детекторов, выходы которых подключены к входам соответствующих видеоусилителей. Второй вход второго фазового детектора соединен с выходом первого фазовращателя. Второй вход первого фазового детектора и вход первого фазовращателя являются вторым входом блока демодуляторов, третьим входом которого являются второй вход четвертого фазового детектора и вход второго фазовращателя, выход которого подключен ко второму входу третьего фазового детектора. Выходы первого и второго видеоусилителей соединены со входами соответствующих разделительных емкостей, выходы которых являются пятым выходом блока демодуляторов.
Блок интеграторов содержит четыре интегратора, группу элементов НЕ и четыре аналого-цифровых преобразователя, входы которых подключены к выходам соответствующих интеграторов, первые входы которых являются соответствующими входами блока интеграторов, пятым входом которого являются вторые входы интеграторов. Первым, вторым, третьим и четвертым выходами блока интеграторов являются выходы соответственно четвертого, третьего и второго аналого-цифровых преобразователей и группы элементов НЕ, вход которой соединен с выходом первого аналого-цифрового преобразователя.
Блок выделения сигналов углового рассогласования содержит два умножителя, сумматор, группу элементов И и делитель, выход которого является выходом блока выделения сигналов углового рассогласования, первым и вторым входами которого являются первые входы соответствующих умножителей, вторые входы которых являются соответственно третьим и четвертым входами блока выделения сигналов углового рассогласования, пятым входом которого является первый вход делителя, второй вход которого подключен к выходу группы элементов И, первый вход которой является шестым входом блока выделения сигналов углового рассогласования. Второй вход группы элементов И соединен с выходом сумматора, первый и второй входы которого подключены к выходам соответствующих умножителей.
При этом кодовый генератор реализован на основе генератора синхроимпульсов, линия задержки, триггера, элемента И и регистра сдвига; первый манипулятор фазы реализован на основе переключателя, двух линий задержки и элемента ИЛИ; блок формирования сигнала сопровождения по дальности реализован на основе двух квадраторов, сумматора и постоянного запоминающего устройства, а второй манипулятор фазы реализован на основе переключателя, фазовращателя и элемента ИЛИ.
На фиг. 1 изображена структурная схема системы; на фиг. 2 - структурная схема кодового генератора; на фиг. 3 - структурная схема первого манипулятора фазы; на фиг. 4 - структурная схема блока формирования сигнала сопровождения по дальности; на фиг. 5 - структурная схема блока демодуляторов; на фиг. 6 - структурная схема блока интеграторов; на фиг. 7 - структурная схема блока выделения сигналов углового рассогласования; на фиг. 8 - структурная схема второго манипулятора фазы.
Одноканальная моноимпульсная радиолокационная система определения направления на цель (см. фиг. 1) содержит кодовый генератор 1, выход которого соединен с первым входом первого манипулятора 2 фазы, выход которого подключен к первому входу сумматора 3, второй вход которого является входом суммарного сигнала системы, входами тактовых импульсов и кода фазовой манипуляции которой являются соответственно первый и второй входы кодового генератора 1. Входами разностных сигналов азимута и угла места системы являются соответственно первый и второй входы первого коммутатора 4, выход которого подключен к второму входу первого манипулятора 2 фазы. Выход сумматора 3 соединен со входом усилителя 5 высокой частоты, выход которого подключен к первому входу смесителя 6, выход которого соединен с первым входом линейного усилителя 7 промежуточной частоты, второй вход и выход которого подключены соответственно к первому выходу блока 8 формирования сигнала сопровождения по дальности и первому входу блока 9 демодуляторов, первый, второй, третий и четвертый выходы которого соединены с соответствующими входами блока 10 интеграторов, первый и второй выходы которого подключены к соответствующим входам блока 8 формирования сигнала сопровождения по дальности и блока 11 выделения сигналов углового рассогласования, третий и четвертый входы которого соединены с соответствующими выходами блока 10 интеграторов, пятый вход которого является входом строба дальности цели системы, входом тактовых импульсов которой являются третий вход первого коммутатора 4 и первый вход второго коммутатора 12, второй вход которого подключен к выходу блока 11 выделения сигналов углового рассогласования, пятый вход которого соединен с вторым выходом блока 8 формирования сигнала сопровождения по дальности. Второй вход смесителя 6 является входом сигнала гетеродина системы, входом опорного сигнала которой являются второй вход блока 9 демодуляторов и первый вход второго манипулятора 13 фазы, выход и второй вход которого соединены соответственно с третьим входом блока 9 демодуляторов и выходом кодового генератора 1. Первый выход блока 8 формирования сигнала сопровождения по дальности является выходом суммарного сигнала системы, выходами азимутального и угломестного сигналов рассогласования, входом сигнала обнаружения цели и выходом квадратурных составляющих фазоманипулированного суммарного сигнала которой являются соответственно первый и второй выходы коммутатора 12, шестой вход блока 11 выделения сигналов углового рассогласования и пятый выход блока 9 демодуляторов.
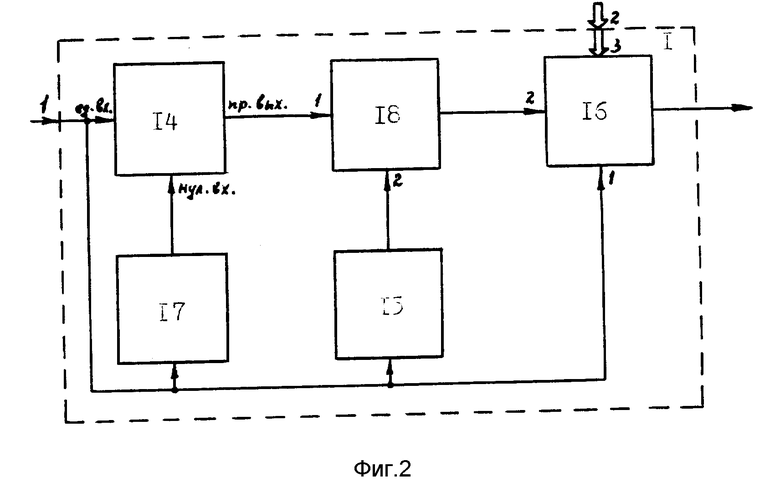
Блок 1 (кодовый генератора - см. фиг. 2) предназначен для выработки сигнала, кодированного в соответствии с кодом внутриимпульсной фазовой манипуляции зондирующих сигналов РЛС. Первым входом кодового генератора 1 являются единичный вход триггера 14, вход генератора 15 синхроимпульсов, первый вход регистра 16 сдвига и вход линии 17 задержки, выход которой соединен с нулевым входом триггера 14, прямой выход которого подключен к первому входу элемента 18 И, второй вход и выход которого соединены соответственно с выходом генератора 15 синхроимпульсов и вторым входом регистра 16 сдвига, выход и третий вход которого являются соответственно выходом и вторым входом кодового генератора 1.
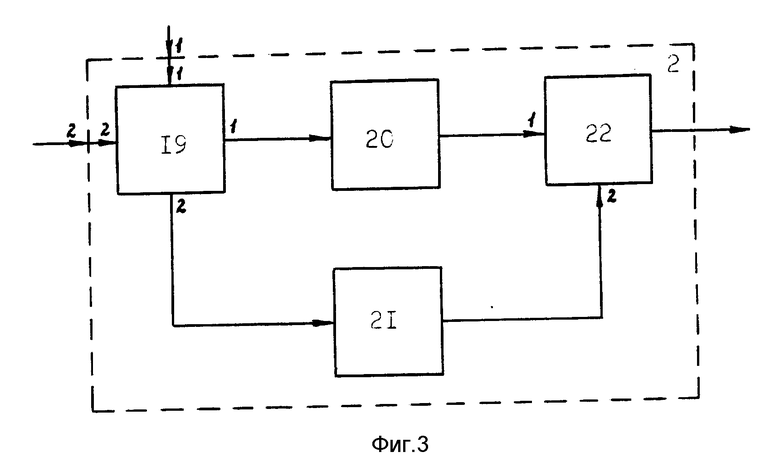
Блок 2 (первый манипулятор фазы - см. фиг. 3) обеспечивает изменение фазы разностного сигнала по высокой частоте, чтобы в каждый момент времени фаза разностного сигнала по отношению к фазе суммарного сигнала была сдвинута на 90 град. Первым и вторым входами первого манипулятора 2 фазы являются соответствующие входы переключателя 19, первый и второй выходы которого соединены с входами соответствующих линий 20 и 21 задержки, выходы которых подключены к соответствующим входам элемента 22 ИЛИ, выход которого является выходом первого манипулятора 2 фазы.
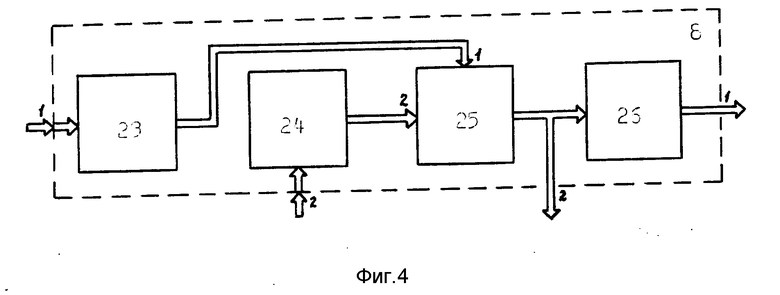
Блок 8 формирования сигнала сопровождения по дальности (см. фиг. 4) обеспечивает объединение квадратурных составляющих суммарного сигнала. Первым и вторым входами блока 8 формирования сигнала сопровождения по дальности являются входы соответствующих квадраторов 23 и 24, выходы которых соединены с соответствующими входами сумматора 25, выход которого подключен к входу постоянного запоминающего устройства 26, выход которого является первым выходом блока 8 формирования сигнала сопровождения по дальности, вторым выходом которого является выход сумматора 25.
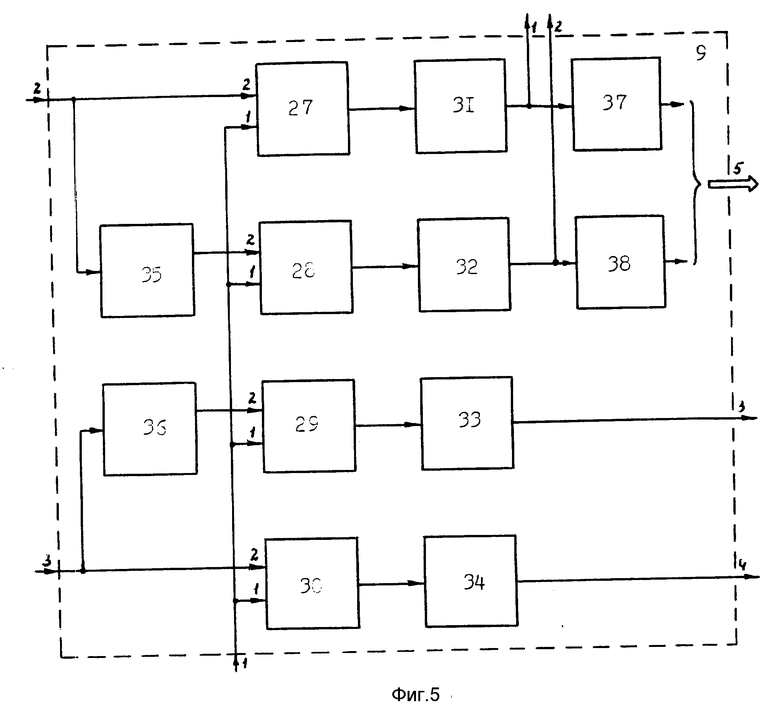
Блок 9 демодуляторов (см. фиг. 5) реализует первый этап разделения совокупности суммарного и разностного сигналов - формирование в квадратурных каналах соответствующих аддитивных смесей из квадратурных составляющих фазоманипулированного суммарного (разностного) и демодулированного разностного (суммарного) сигналов. Первым входом блока 9 демодуляторов являются первые входы первого, второго, третьего и четвертого фазовых детекторов 27, 28, 29 и 30, выходы которых соединены с входами соответствующих видеоусилителей 31, 32, 33 и 34, выходы которых являются соответствующими выходами блока 9 демодуляторов. Второй вход второго фазового детектора 28 соединен с выходом первого фазовращателя 35. Второй вход первого фазового детектора 27 и вход первого фазовращателя 35 являются вторым входом блока 9 демодуляторов, третьим входом которого являются второй вход четвертого фазового детектора 30 и вход второго фазовращателя 36, выход которого соединен с вторым входом третьего фазового детектора 29. Выходы первого и второго видеоусилителей 31 и 32 подключены к входам соответствующих разделительных емкостей 37 и 38, выходы которых являются пятым выходом блока 9 демодуляторов.
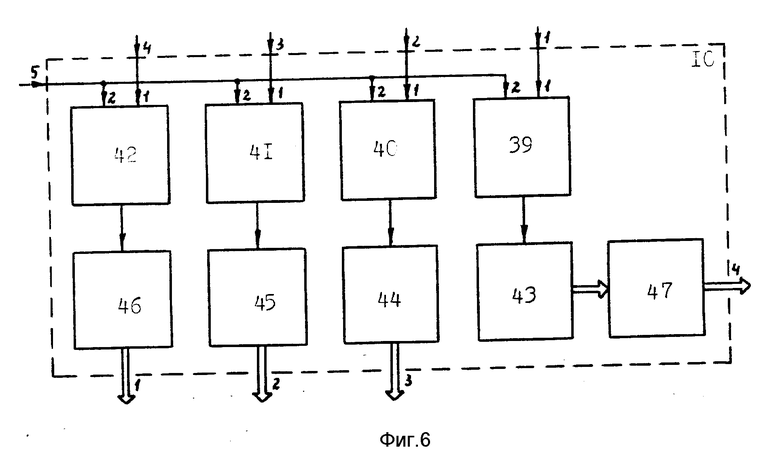
Блок 10 интеграторов (см. фиг. 6) предназначен для реализации второго этапа разделения совокупности суммарного и разностного сигналов - выделение из смесей, сформированных на первом этапе, квадратурных составляющих демодулированных сигналов путем их накопления на интеграторах. Первым, вторым, третьим и четвертым входами блока 10 интеграторов являются первые входы соответствующих интеграторов 39, 40, 41 и 42, выходы которых соединены с входами соответствующих аналого-цифровых преобразователей 43, 44, 45 и 46. Вторые входы интеграторов 39, 40, 41 и 42 являются пятым входом блока 10 интеграторов, первым, вторым, третьим и четвертым выходами которого являются выходы соответственно четвертого, третьего и второго аналого-цифровых преобразователей 46, 45 и 44 и группы 47 элементов НЕ, вход который подключен к выходу первого аналого-цифрового преобразователя 43.
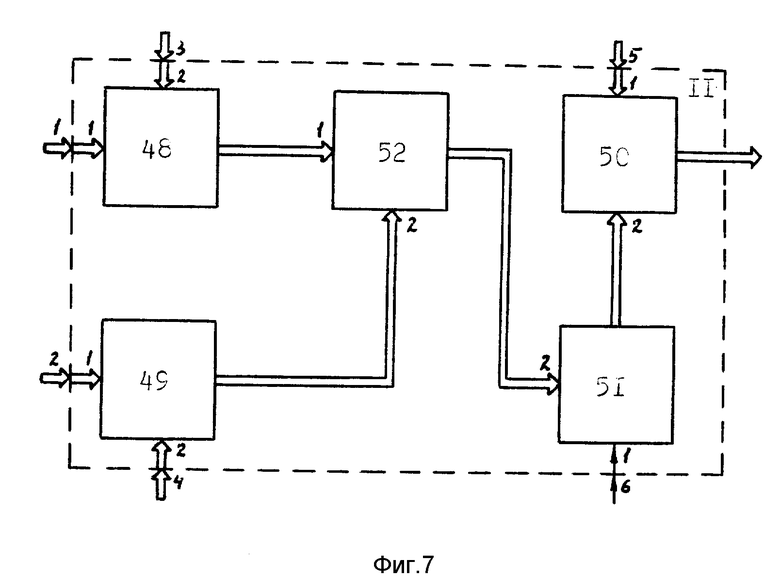
Блок 11 выделения сигналов углового рассогласования (см. фиг. 7) осуществляет образование сигналов углового рассогласования. Первым и вторым входами блока 11 выделения сигналов углового рассогласования являются первые входы соответствующих умножителей 48 и 49, вторые входы которых являются соответственно третьим и четвертым входами блока 11 выделения сигналов углового рассогласования, пятым входом которого является первый вход делителя 50, второй вход которого подключен к выходу группы 51 элементов И, первый вход которой является шестым входом блока 11 выделения сигналов углового рассогласования, выходом которого является выход делителя 50. Второй вход группы 51 элементов И соединен с выходом сумматора 52, первый и второй входы которого подключены к выходам соответственно умножителей 48 и 49.
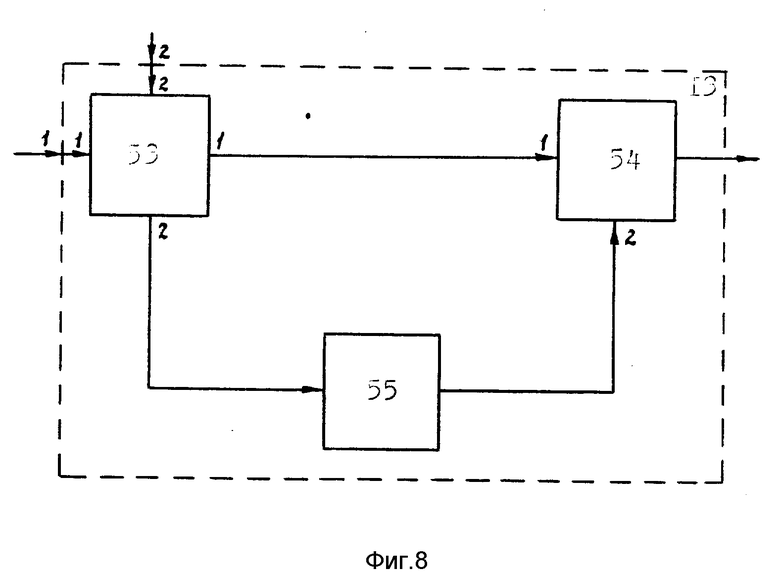
Блок 13 (второй манипулятор фазы - см. фиг. 8) предназначен для изменения фазы опорного сигнала промежуточной частоты. Первым и вторым входами второго манипулятора 13 фазы являются соответствующие входы переключателя 53, первый выход которого подключен к первому входу элемента 54 ИЛИ, второй вход которого соединен с выходом фазовращателя 55, вход которого подключен к второму выходу переключателя 53. Выходом второго манипулятора 13 фазы является выход элемента 54 ИЛИ.
Одноканальная моноимпульсная радиолокационная система определения направления на цель функционирует следующим образом.
В исходном состоянии триггер 14 кодового генератора 1 находится в положении, когда на его прямом выходе сигнал отсутствует, что соответствует выключенному состоянию кодового генератора 1.
Обработка сигналов в системе осуществляется периодически (с периодом повторения зондирующих посылок). Начало обработки задается подачей тактовых импульсов на единичный вход триггера 14, а окончание - подачей тех же импульсов на нулевой вход триггера 14 после их задержки в линии 17 задержки. Время задержки, равное длительности принятого сигнала, определяет продолжительность рабочего состояния системы. Тактовые импульсы, поступающие с соответствующего входа системы, синхронизированы частотой повторения зондирующих посылок таким образом, что в систему они подаются с задержкой относительно соответствующих зондирующих импульсов, которая определяется дальностью до сопровождаемой цели. С периодичностью осуществляется и переключение разностных сигналов азимута и угла места на входе системы, а также переключение азимутального и угломестного сигналов рассогласования на выходе системы путем подачи тактовых импульсов соответственно на третий вход первого коммутатора 4 и первый вход второго коммутатора 12.
Для повышения помехозащищенности РЛС по отношению ко всем видам ответных помех и обеспечения высокой разрешающей способности по дальности производится внутриимпульсная двухуровневая (0; π ) фазовая манипуляция (ФМ) зондирующих сигналов двоичным многоразрядным кодом (М-последовательностью) по псевдослучайному закону.
После суммарно-разностного преобразования принимаемые сигналы поступают: суммарный сигнал - на второй вход сумматора 3, разностные сигналы азимута и угла места - соответственно на первый и второй входы первого коммутатора 4. Суммарный uΣ(t) и разностные сигналы азимута uΔψ(t) и угла места uΔν(t) могут быть записаны в виде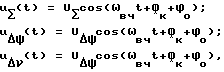 ,
,
где
UΣ,UΔψ,UΔν - амплитуды соответственно суммарного сигнала и разностных сигналов азимута и угла места; ωвч - несущая (высокая) круговая частота сигналов; Фк - фазовый сдвиг, вносимый ФМ зондирующих сигналов; ϕo - начальная фаза сигналов.
Амплитуды суммарного и разностных входных сигналов определяются характеристиками соответствующих диаграмм направленности антенны амплитудной моноимпульсной РЛС и равным
где
Uo - амплитуда принятого отраженного сигнала на входе антенны; GΣ,GΔψ,GΔν - характеристики диаграмм направленности антенны соответственно по суммарному сигналу и разностным сигналам азимута и угла места.
С приходом со входа тактовых импульсов системы очередного импульса осуществляется запись в регистр 16 сдвига кода ФМ (поступающего с соответствующего входа системы) и синхронизация генератора 15 синхроимпульсов. Тактовый импульс обеспечивает также появление на прямом выходе триггера 14 сигнала, разрешающего прохождение через элемент 18 И импульсов, вырабатываемых генератором 15 синхроимпульсов. Частота импульсов генератора 15 синхроимульсов сопряжена с длительностью одного дискрета фазоманипулированного сигнала (дискрета дальности), тем самым обеспечивается поэлементное считывание записанного в регистр 16 сдвига кода ФМ. Считываемый кодированный сигнал поступает на первый вход первого манипулятора 2 фазы, на второй вход которого с выхода первого коммутатора 4 подается разностный сигнал (либо азимута, либо угла места).
Кодированный сигнал в первом манипуляторе 2 фазы поступает на первый вход переключателя 19, управляя таким образом, что при нулевом значении разряда кода ФМ разностный сигнал подключается ко входу первой линии 20 задержки, а при единичном значении разряда - к входу второй линии 21 задержки. Первая линия 20 задержки обеспечивает изменение фазы сигнала на 90 град., а вторая линия 21 задержки - на 270 град. Тем самым в результате прохождения через первый манипулятор 2 фазы разностного сигнала его фаза по отношению к фазе суммарного сигнала в каждый момент времени оказывается сдвинутой на 90 град.
Таким образом, поступающий на первый вход сумматора 3 разностный сигнал может быть записан в виде
uΔ(t) = UΔcos(ωвчt+фк+фм+ϕo), ,
где
UΔ≡ UΔψ или UΔ≡ UΔν в зависимости от сигнала на выходе первого коммутатора 4; Фм - фазовый сдвиг, вносимый первым манипулятором 2 фазы, причем Фк + Фм=90 град.
В качестве фазосдвигающих элементов первого манипулятора 2 фазы отраженного от цели высокочастотного сигнала малой мощности может быть использован, например, проходной фазовращатель с двумя параллельными цепями (линиями задержки) на p-i-n диодах, имеющих время переключения в пределах 10...100 нс. Такой фазовращатель является широкополосным (то есть создает временной), а не чисто фазовый сдвиг), обладает высокой точностью и выполняется в микрополосковом исполнении, т.е. имеет малые габариты, что особенно важно для бортовой аппаратуры.
После объединения в сумматоре 3 разностного и суммарного сигналов их совокупность усиливается по высокой частоте в усилителе 5 высокой частоты и преобразуется по частоте в смесителе 6. Высокостабильный гетеродинный сигнал, поступающий на второй вход смесителя 6 с соответствующего входа системы, формируется задающим генератором передатчика когерентно с излучаемым фазоманипулированным сигналом. При этом частота гетеродинных колебаний смещена относительно частоты сигнала на величину промежуточной частоты. Это смещение не зависит от частоты сигнала и остается постоянным для всех рабочих частот в диапазоне перестройки частоты, что делает ненужной автоматическую подстройку частоты в приемном тракте системы.
Таким образом, после усиления по высокой частоте и преобразования по частоте сигнал на первом входе линейного усилителя 7 промежуточной частоты может быть записан в виде ,
,
где
K1 - постоянный коэффициент; ωпч - несущая (промежуточная) круговая частота сигналов.
Сигнал на выходе линейного усилителя 7 промежуточной частоты будет равен ,
,
где
K2 - постоянный коэффициент.
После усиления и преобразования сигналы поступают в блок 9 демодуляторов, где в квадратурных каналах (косинусных и синусных) формируются соответствующие аддитивные смеси из квадратурных составляющих фазоманипулированного суммарного (разностного) и демодулированного разностного (суммарного) сигналов. Построение видеотрактов приемника в виде идентичных квадратурных каналов, как известно, используется для исключения энергетических потерь принимаемого высокочастотного сигнала, вызванных незнанием его фазы. Квадратурные каналы отличаются тем, что на их фазовые детекторы опорные напряжения подаются со сдвигом 90 град. В качестве опорных напряжений используются колебания промежуточной частоты, формируемые задающим генератором передатчика когерентно с излучаемым сигналом. Для устранения фазовых искажений, вызванных движением носителя РЛС, частота опорного напряжения (подаваемого с соответствующего входа системы) предварительно корректируется на величину частоты Доплера, пропорциональную скорости сближения носителя РЛС с сопровождаемой целью. Необходимый сдвиг частоты опорного напряжения может быть выполнен, например, с помощью системы фазовой автоподстройки частоты [5, c. 26] .
Разделяемые сигналы поступают на первые входы фазовых детекторов 27, 28, 29 и 30, на вторые входы которых поступают опорные напряжения промежуточной частоты. Фазовращатели 35 и 36 на 90 град. обеспечивают ортогональность опорных напряжений в квадратурных каналах. Квадратурные каналы, образованные фазовыми детекторами 27 и 28 и видеоусилителями 31 и 32, формируют соответствующие аддитивные смеси из фазоманипулированного суммарного и демодулированного разностного сигналов ζ1(t) и ζ2(t) путем подачи на вторые входы фазовых детекторов 27 и 28 ортогональных гармонических опорных напряжений. Формирование соответствующих аддитивных смесей из фазоманипулированного разностного и демодулированного суммарного сигналов ζ3(t) и ζ4(t) происходит в квадратурных каналах, образованных фазовыми детекторами 29 и 30 и видеоусилителями 33 и 34, путем подачи на вторые входы фазовых детекторов 29 и 30 ортогональных опорных напряжений с фазой, изменяемой вторым манипулятором 13 фазы.
Второй манипуляторв 13 фазы функционирует аналогично первому манипулятору 2 фазы. Кодированный сигнал, поступающий на второй вход переключателя 53, обеспечивает подключение опорного напряжения (поступающего на первый вход переключателя 53 с соответствующего входа системы) либо непосредственно к элементу 54 ИЛИ (при нулевом значении разряда кода ФМ), либо через выполненный на RC-элементах фазовращатель 55 (при единичном значении разряда кода ФМ), который изменяет фазу опорного сигнала на 180 град.
Сформированные соотношения сигналов: ортогональность суммарного и разностного сигналов, а также ортогональность опорных колебаний в одноименных квадратурных каналах обеспечивают получение на выходах фазовых детекторов 27, 28, 29 и 30 соответствующих аддитивных смесей. А именно: на выходе фазового детектора 27 - смеси из косинусной составляющей фазоманипулированного суммарного сигнала и синусной составляющей демодулированного разностного сигнала: на выходе фазового детектора 28 - смеси из синусной составляющей фазоманипулированного суммарного сигнала и косинусной составляющей демодулированного разностного сигнала; на выходе фазового детектора 29 - смеси из косинусной составляющей фазоманипулированного разностного сигнала и синусной составляющей демодулированного суммарного сигнала; на выходе фазового детектора 30 - смеси из синусной составляющей фазоманипулированного разностного сигнала и косинусной составляющей демодулированного суммарного сигнала.
Таким образом, значения напряжений на выходах фазовых детекторов 27, 28, 29 и 30 можно представить в виде ,
,
где
K3 - постоянный коэффициент; Uоп и ϕоп - соответственно амплитуда и фаза опорного сигнала; здесь учтено, что ϕоп= 0 , Фк принимает лишь два значения: 0 и 180 град., а Фк + Фм = 90 град.; ,
,
здесь учтено, что в данном случае ϕоп = 90 град.; ,
,
здесь учтено, что ϕоп-Фк= 90 град., - a Фм-ϕоп= 0; = 0; ,
,
здесь учтено, что Фк - ϕоп = 0, а Фм - ϕоп = 90 град.
Квадратурные составляющие сигналов поступают в соответствующие видеоусилители 31, 32, 33 и 34, которые осуществляют двухполярное усиление. Видеосигналы  , проходя через соответствующие разделительные емкости 37 и 38, освобождаются от демодулированных (постоянных) составляющих и в виде квадратурных составляющих фазоманипулированного суммарного сигнала подаются на соответствующий выход системы (в обнаружитель и на схему захвата цели на сопровождение). Для того, чтобы при этом квадратурные составляющие фазоманипулированного суммарного сигнала не искажалось, постоянная времени разделительных емкостей 37 и 38 выбираются равной произведению длительности одного дискрета фазоманипулированного сигнала на корень квадратный из длины кода ФМ.
, проходя через соответствующие разделительные емкости 37 и 38, освобождаются от демодулированных (постоянных) составляющих и в виде квадратурных составляющих фазоманипулированного суммарного сигнала подаются на соответствующий выход системы (в обнаружитель и на схему захвата цели на сопровождение). Для того, чтобы при этом квадратурные составляющие фазоманипулированного суммарного сигнала не искажалось, постоянная времени разделительных емкостей 37 и 38 выбираются равной произведению длительности одного дискрета фазоманипулированного сигнала на корень квадратный из длины кода ФМ.
Для дальнейшего преобразования видеосигналы ζ1(t) и ζ2(t) , ζ3(t) и ζ4(t) поступают в блок 10 интеграторов. Интегрирование осуществляется в пределах строба дальности цели, который поступает на пятый вход блока 10 интеграторов с соответствующего входа системы (из канала сопровождения цели по дальности, в течение времени, равного длительности зондирующего импульса.
После интегрирования сигналов в соответствующих интеграторах 39, 40, 41 и 42 получим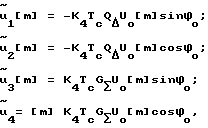 ,
,
где
m - номер зондирующего импульса; K4 - постоянный коэффициент; Tc - длительность зондирующего импульса (Tc=L τo , L - длина кода ФМ; τo - длительность одного дискрета фазоманипулированного сигнала; QΔ = GΔcosγ(γ=(0,π) - определяет знак углового рассогласования); Uo [m] - амплитуда принятого сигнала в m-й посылке зондирования.
При выводе выражений для напряжения  и
и  учитывались свойства М-последовательности; число "единиц" больше числа "нулей" на единицу; псевдослучайность М-последовательности, в частности, свойство уравновешенности и свойство серий, т.е. как бы одинаковую вероятность появления "единиц" и "нулей", и то, что после появления "единицы" следующий элемент с равной вероятностью может быть как "единица", так и "нуль".
учитывались свойства М-последовательности; число "единиц" больше числа "нулей" на единицу; псевдослучайность М-последовательности, в частности, свойство уравновешенности и свойство серий, т.е. как бы одинаковую вероятность появления "единиц" и "нулей", и то, что после появления "единицы" следующий элемент с равной вероятностью может быть как "единица", так и "нуль".
Далее напряжения  преобразуются в цифровой код соответствующими аналого-цифровыми преобразователями 43, 44, 45 и 46. Группа 47 элементов НЕ инвертирует код напряжения с выхода первого аналого-цифрового преобразователя 43 с тем, чтобы знак этого кода привести в соответствие со знаками остальных кодов напряжений.
преобразуются в цифровой код соответствующими аналого-цифровыми преобразователями 43, 44, 45 и 46. Группа 47 элементов НЕ инвертирует код напряжения с выхода первого аналого-цифрового преобразователя 43 с тем, чтобы знак этого кода привести в соответствие со знаками остальных кодов напряжений.
Коды U4[m] и U3[m] квадратурных составляющих суммарного сигнала соответственно с первого и второго выходов блока 10 интеграторов подаются в блок 8 формирования сигнала сопровождения по дальности, где в квадраторах 23 и 24 возводятся в квадрат и суммируются в сумматоре 25. С выхода сумматора 25 код U
Образование сигналов углового рассогласования производится в блоке 11 выделения сигналов углового рассогласования путем сравнения кодов u4[m] и u3[m] квадратурных составляющих суммарного сигнала с кодами u2[m] и u1[m] одноименных квадратурных составляющих разностного сигнала.
Как известно [6, c. 28], на выходе блока выделения ошибки моноимпульсной РЛС образование сигнала ошибки производится по правилу
где UΔ,UΣ и ϕΔ,ϕΣ - модули и фазы сигналов разностного и суммарного каналов соответственно; β - угол отклонения электрической оси антенны РЛС от направления на сопровождаемую цель.
В случае приема сигналов с помощью квадратурных каналов вышеприведенное соотношение преобразуется в виду ,
,
т. е. нормировка сигнала ошибки осуществляется по мгновенному значению квадрата амплитуды (мгновенная автоматическая регулировка усиления) по каждому зондирующему импульсу.
Указанное соотношение реализуется с помощью первого и второго умножителя 48 и 49, сумматор 52 и делителя 50. Причем формирование сигнала ошибки осуществляется только при поступлении на первый вход группы 51 элементов И сигнала обнаружения цели с соответствующего входа системы (из обнаружителя), что исключает выработку недостоверной информации об угловом положении цели.
Учитывая, что uк [m] , k= 1, 2, 3, 4, представляют собой стационарно связанные нормально распределенные случайные величины с нулевыми средними значениями, статистически усредняя выражение для δ(β) , получим пеленгационную характеристику в виде
где
q - отношение сигнал/шум на выходе интеграторов при условии, что пеленгуемая цель находится на равносигнальном направлении, т.е. GΣ(0) = 1.
При большом отношении сигнал/шум (q>>1) выражение для пеленгационной характеристики  примет вид
примет вид .
.
Таким образом, длина L M-последовательности оказывает влияние на крутизну пеленгационной характеристики, что является существенным на малых дистанциях до цели.
Угловое сопровождение цели возможно при L≥2, что соответствует дальности до цели Du≥ (2/ τo ) 150 [м], где τo - длительность одного дискрета фазоманипулированного сигнала в мкс. Это вполне приемлемо.
Выдача азимутального и угломестного сигналов рассогласования в соответствующие каналы углового сопровождения цели осуществляется с помощью второго коммутатора 12, который управляется тактовыми импульсами с соответствующего входа системы синхронно с переключением разностных сигналов азимута и угла места с помощью первого коммутатора 4.
Техническим преимуществом предлагаемой системы перед устройством-прототипом [4] является то, что обеспечивается одноканальный прием сигналов и выделение угловой информации в бортовых моноимпульсных РЛС сопровождения цели с внутриимпульсной фазовой манипуляцией зондирующих сигналов двоичным многоразрядным кодом (М-последовательностью). Использование сигналов с фазовой манипуляцией повышает помехозащищенность РЛС по отношению ко всем видам организованных ответных помех, а использование корреляционной обработки сигналов по сравнению с нелинейной фильтровой обеспечивает выигрыш в отношении сигнал/шум за счет отсутствия квантования по времени и уровню до 6 дБ. Указанный технический результат от использования предлагаемой системы достигается тем, что объединение суммарного сигнала с разностными сигналами азимута и угла места осуществляется по высокой частоте поочередно с периодом повторения зондирующих посылок путем изменения фазы разностного сигнала и последующего его сложения с суммарным сигналом. Изменение фазы разностного сигнала обеспечивается таким образом, чтобы в каждый момент времени его фаза по отношению к фазе суммарного сигнала была сдвинута на 90 град.
Разделение преобразованных по частоте и усиленных сигналов осуществляется посредством их корреляционной обработки в два этапа; демодуляцией сигналов и их последующим интегрированием.
На первом этапе в квадратурных каналах формируются соответствующие аддитивные смеси из квадратурных составляющих фазоманипулированного суммарного (разностного) и демодулированного разностного (суммарного) сигналов. Для этого в квадратурных каналах, формирующих смеси из квадратурных составляющих фазоманипулированного суммарного и демодулированного разностного сигналов, используются ортогональные гармонические опорные напряжения, а в квадратурных каналах, формирующих смеси из квадратурных составляющих фазоманипулированного разностного и демодулированного суммарного сигналов - ортогональные опорные напряжения с фазой, изменяемой в соответствии с кодом фазовой манипуляции синхронно с изменением фазы разностного сигнала на входе системы.
На втором этапе разделения сигналов из смесей, сформированных на первом этапе, выделяются квадратурные составляющие демодулированных сигналов путем их накопления на интеграторах. Присутствующие в смесях квадратурные составляющие фазоманипулированных сигналов в результате их накопления на интеграторах подавляются в силу свойств М-последовательности.
Разделенные квадратурные составляющие сигналов преобразуются в цифровой код и используются для выделения сигналов углового рассогласования, которые поочередно (синхронно с подключением разностных сигналов для объединения с суммарным сигналом на входе системы) подаются в соответствующие каналы углового сопровождения цели.
Пользуясь представленными в материалах заявки сведениями, чертежами и используя известные материалы, комплектующие изделия и технологию, предлагаемую систему можно изготовить в производстве и использовать в амплитудных суммарно-разностных моноимпульсных РЛС сопровождения цели для одноканального приема сигналов с внутриимпульсной фазовой манипуляцией двоичным многоразрядным кодом (М-последовательностью) и выделения угловой информации, что доказывает промышленную применимость предлагаемого объекта изобретения.
В соответствии с материалами заявки на предприятии был изготовлен опытный образец системы, испытания которого подтвердили достижение указанного в материалах технического результата.
Ниже приведен перечень подрисуночных надписей.
К фиг. 1:
1 - кодовый генератор; 2 - первый манипулятор фазы; 3 - сумматор; 4 - первый коммутатор; 5 - усилитель высокой частоты; 6 - смеситель; 7 - линейный усилитель промежуточной частоты; 8 - блок формирования сигнала сопровождения по дальности; 9 - блок демодуляторов; 10 - блок интеграторов; 11 - блок выделения сигналов углового рассогласования; 12 - второй коммутатор; 13 - второй манипулятор фазы.
К фиг. 2:
14 - триггер; 15 - генератор синхроимпульсов; 16 - регистр сдвига; 17 - линия задержки; 18 - элемент И.
К фиг. 3:
19 - переключатель; 20 и 21 - соответственно первая и вторая линия задержки; 22 - элемент ИЛИ.
К фиг. 4:
23 и 24 - соответственно первый и второй квадраторы; 25 - сумматор;
26 - постоянное запоминающее устройство.
К фиг. 5:
27, 28, 29 и 30 - соответственно первый, второй, третий и четвертый фазовые детекторы; 31, 32, 33 и 34 - соответственно первый, второй, третий и четвертый видеоусилители; 35 и 36 - соответственно первый и второй фазовращатели; 37 и 38 - соответственно первая и вторая разделительные емкости.
К фиг. 6:
39, 40, 41 и 42 - соответственно первый, второй, третий и четвертый интеграторы; 43, 44, 45 и 46 - соответственно первый, второй, третий и четвертый аналого-цифровые преобразователи; 47 - группа элеменов НЕ.
К фиг. 7:
48 и 49 - соответственно первый и второй умножители; 50 - делитель; 51 - группа элементов И; 52 - сумматор.
К фиг. 8:
53 - переключатель; 54 - элемент ИЛИ; 55 - фазовращатель.
Источники информации
1. Леонов А.И., Фомичев К.А. Моноимпульсная радиолокация. - М.: Радио и связь, 1984.
2. Signal comparison system. Патент США, N 2721320.
3. Single channel monopulse radar receiver. Патент США, N 3162851.
4. Klaus D.E., Hollins R.P. Monochannel direction finding improves monopulse technique // Defense Electronics. - 1982. - V. 14. - p. 35 (прототип).
5. Шахгильдян В. В., Ляховкин А.А. Системы фазовой автоподстройки частоты. - М.: Связь, 1972.
6. Свиридов Э.Ф. Сравнительная эффективность моноимпульсных радиолокационных систем пеленгации. - Л.: Судостроение, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1995 |
|
RU2079859C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
Изобретение относится к радиолокации и может быть использовано для одноканального приема сигналов и выделения угловой информации в амплитудных суммарно-разностных моноимпульсных РЛС сопровождения цели с внутриимпульсной фазовой манипуляцией (ФМ) зондирующих сигналов М-последовательностью. Согласно изобретению объединение суммарного сигнала с разностными сигналами азимута и угла места осуществляется по высокой частоте, поочередно, с периодом повторения зондирующих посылок, путем изменения фазы разностного сигнала и последующего его сложения с суммарным сигналом. Разделение преобразованных по частоте и усиленных сигналов осуществляется посредством их корреляционной обработки в два этапа. На первом-в квадратурных каналах формируются аддитивные смеси из квадратурных составляющих суммарного (разностного) с ФМ и демодулированного разностного (суммарного) сигналов. На втором этапе выделяются квадратурные составляющие демодулированных сигналов путем их накопления на интеграторах. Разделенные квадратурные составляющие сигналов преобразуются в цифровой код и используются для выделения сигналов углового рассогласования. 1 с. и 4 з.п. ф-лы, 8 ил.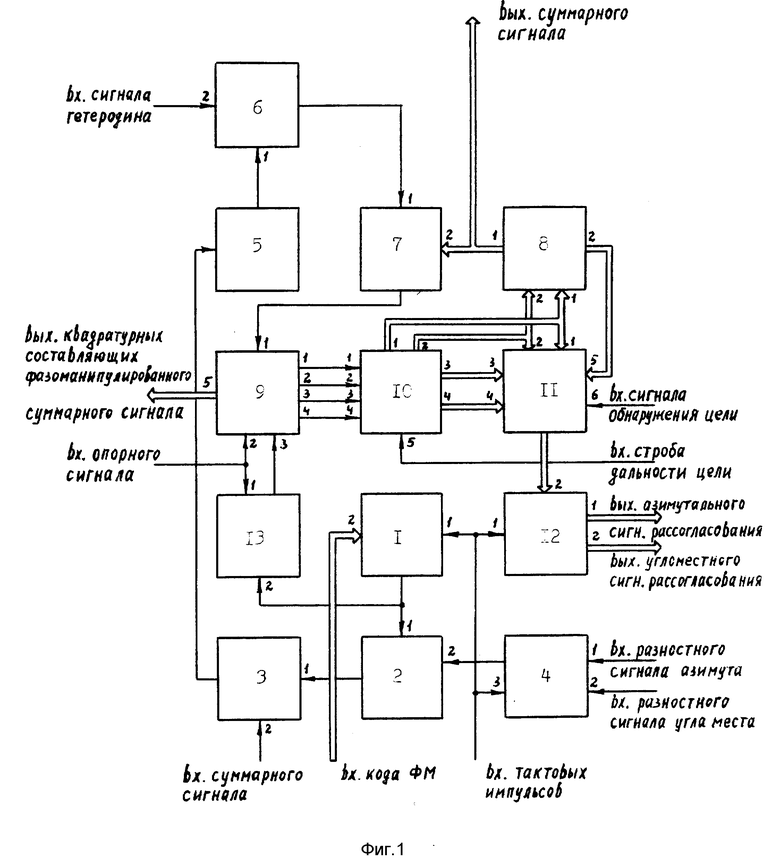
| KLAVS D.E | |||
| at al | |||
| Monochannel direction finding improves monopulse technique | |||
| Defense Electronics | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
