Изобретение относится к радиолокационным системам (РЛС) с импульсным фазоманипулированным зондирующим сигналом, используемым на подвижных носителях, преимущественно на беспилотных летательных аппаратах (БПЛА), и предназначенным для обнаружения и сопровождения моноимпульсным способом сигналов от объектов назначения (целей).
В используемых в настоящее время моноимпульсных радиолокаторах, предназначенных для обнаружения и сопровождения целей, принимаемые высокочастотные сигналы после суммарно-разностного преобразования подаются на смесители суммарного и разностного каналов и затем на усилители промежуточной частоты, с выходов которых сигналы поступают на амплитудный детектор в суммарном канале и на фазовый детектор в разностном канале. В результате фазового детектирования образуется сигнал углового рассогласования, используемый для углового сопровождения [1, с.22, рис.1.9], [2, с.20, рис.15]. Сигнал суммарного канала поступает на временной дискриминатор, в котором образуется сигнал для сопровождения по дальности.
Недостатком этих устройств является низкая надежность, связанная с недостаточной помехозащищенностью по отношению к активным и пассивным помехам. Активные помехи приводят к обнаружению ложных объектов и маскированию объектов назначения настоящих. Пассивные помехи в виде отражений от местных предметов также маскируют полезный сигнал ввиду невозможности реализовать высокое разрешение по углу на больших дальностях при ограниченных размерах радиолокаторов, устанавливаемых на подвижных носителях, которые вследствие этого имеют широкую диаграмму направленности антенны.
Известно устройство [3], которое использует для работы сложные фазоманипулированные (далее по тексту ФМ) сигналы и содержит цифровые фильтры сжатия сигналов, поступающих с выходов фазовых детекторов по две квадратуры в суммарном и разностном каналах. Выходные сигналы одноименных квадратур суммарного и разностного каналов поступают на умножители для перемножения одноименных квадратур, а полученные произведения подаются на сумматор для исключения влияния случайной начальной фазы. Выходной сигнал сумматора квантуется на три уровня, определяющие выходной сигнал углового рассогласования, по которому может вестись сопровождение объекта.
Надежность этого устройства несколько повышена благодаря помехоустойчивости по отношению к активным импульсным помехам и несколько повышена вследствие использования сложного ФМ сигнала.
Тем не менее, надежность устройства недостаточна из-за низкой помехоустойчивости по отношению к пассивным помехам, например в виде отражений от местных предметов, что обусловлено низкой угловой разрешающей способностью радиолокаторов на подвижных объектах, имеющих существенные массогабаритные ограничения. Вследствие этого помеховый сигнал проходит через фильтр сжатия и снижает точность углового сопровождения объекта.
Известна РЛС [4], которая наиболее близка по технической сущности к предлагаемому устройству и принята в качестве прототипа предлагаемой системы.
РЛС по прототипу содержит последовательно соединенные генератор кодов, фазовый манипулятор, усилитель мощности, антенный переключатель и антенну, последовательно включенные суммарно-разностный преобразователь, усилитель высокой частоты, смеситель, усилитель промежуточной частоты, а также возбудитель, импульсный модулятор, привод антенны, блоки фазовых детекторов суммарного и разностного сигналов с амплитудными квантователями, цифровые согласованные фильтры комплексного сигнала, содержащего две квадратуры, блок вычисления модуля, блок обнаружения и вычисления координат, дискриминатор дальности, преобразователь кода во временной интервал, частотный дискриминатор, дискриминатор угла, генераторы доплеровских частот, фильтры доплеровских частот, блок захвата объекта сопровождения, сумматоры, вычитатели, вентили и регистры.
Благодаря применению фазоманипулированных сигналов и одновременной работе трех контуров сопровождения объекта: по дальности, по доплеровской частоте и по углу существенно повышена разрешающая способность РЛС.
Недостатком РЛС при ее установке на БПЛА является невысокая надежность вследствие того, что при увеличении скорости носителя, в частности при установке РЛС на беспилотном летательном аппарате, возникают существенные искажения фазы отраженных сигналов, которые при большой длительности зондирующего сигнала вызывают трудности сжатия в цифровых согласованных фильтрах.
Кроме того, любая неисправность в РЛС может привести к тому, что БПЛА не достигнет объекта назначения и будет утерян, что нежелательно по экономическим соображениям.
Решаемой задачей является повышение надежности РЛС при установке на БПЛА.
Для достижения заявленного технического результата предлагается перед запуском РЛС в штатный режим проводить ее комплексную проверку в контрольном режиме, для чего в РЛС вводится устройство имитации отраженного сигнала по дальности, по углу и по частоте с помощью компенсаторов доплеровского сдвига частоты сигнала.
Сущность изобретения заключается в том, что предлагаемая моноимпульсная радиолокационная система содержит антенну, кинематически связанную с приводом антенны и соединенную с волноводным входом-выходом суммарно-разностного преобразователя, вход и выход сигналов суммарного канала которого через антенный переключатель соединен соответственно с выходом усилителя мощности и входом сигналов суммарного канала блока усилителей высокой частоты, вход сигналов разностного канала которого соединен с соответствующим выходом суммарно-разностного преобразователя, генератор кодов, синхронизатор, возбудитель, выход сигналов несущей частоты которого соединен с первым входом фазового манипулятора, к выходу которого подключен первый вход усилителя мощности, второй вход которого соединен с выходом импульсного модулятора, вход которого и вход генератора кодов подключены к первому выходу синхронизатора, на котором формируется последовательность запускающих импульсов с частотой зондирования, кроме этого, содержит блок смесителей, сигнальные входы которого подключены соответственно к выходам сигналов суммарного и разностного каналов блока усилителей высокой частоты, гетеродинный вход соединен с выходом сигналов гетеродинной частоты возбудителя, а выходы сигналов суммарного и разностного каналов через блок усилителей промежуточной частоты соединены с входами соответственно блока квадратурных фазовых детекторов и амплитудно-временных квантователей сигналов суммарного канала и блока квадратурных фазовых детекторов и амплитудно-временных квантователей сигналов разностного канала, опорные входы которых подключены к выходу опорных сигналов возбудителя, кроме этого, содержит цифровой согласованный фильтр сигналов суммарного канала, выход которого соединен с информационными входами дискриминатора дальности, частотного дискриминатора, блока захвата объекта на сопровождение и блока вычисления модуля сигнала объединения квадратур, выход которого соединен с первым входом блока обнаружения и выбора объекта сопровождения, вход которого по сигналу текущего углового положения антенны соединен с выходом датчика углового положения антенны, который кинематически связан с приводом антенны, цифровой согласованный фильтр сигналов разностного канала, к выходу которого подключен фильтр доплеровской частоты, соединенный с первым входом углового дискриминатора, второй вход которого подключен к выходу дискриминатора дальности, кроме этого, содержит регистр угла и регистр дальности, входы данных которых подключены к соответствующим информационным выходам блока обнаружения и выбора объекта сопровождения, выход сигналов управления приводом которого соединен с первым входом коммутатора сигналов управления приводом, а выход по сигналу окончания обзора соединен с управляющими входами коммутатора сигналов управления приводом, регистра угла, регистра дальности и блока захвата объекта на сопровождение, информационный и управляющий выходы которого соединены с соответствующими входами регистра частоты, кроме этого, содержит преобразователь кода во временной интервал, первый, второй и третий сумматоры, блок вентилей, первый и второй вычитатели, первый и второй генераторы доплеровской частоты, выходы которых соединены с входами частотных полустробов сопровождения по доплеровской частоте частотного дискриминатора, вход центральной частоты сопровождения которого и соответствующие частотные входы дискриминатора дальности и фильтра доплеровской частоты соединены с выходом третьего генератора доплеровской частоты, при этом управляющий вход привода антенны соединен с выходом коммутатора сигналов управления приводом, второй вход которого соединен с выходом первого вычитателя, первый вход которого подключен к выходу регистра угла, а второй соединен с выходом углового дискриминатора через блок вентилей, управляющий вход которого подключен к управляющему выходу блока захвата объекта на сопровождение, выход регистра дальности соединен с первым входом первого сумматора, второй вход которого соединен с выходом сигналов отклонения дискриминатора дальности, а выход подключен к входу преобразователя кода во временной интервал, запускающий вход которого и запускающий вход блока обнаружения и выбора объекта сопровождения подключены к первому выходу синхронизатора, ко второму выходу - синхронизирующих импульсов с частотой квантования принимаемых сигналов - которого подключены входы синхронизации блока обнаружения и выбора объекта сопровождения, блока захвата объекта на сопровождение и входы синхронизации цифровых согласованных фильтров сигналов суммарного и разностного каналов, кодовые входы которых подключены к выходу генератора кодов, выход преобразователя кода во временной интервал соединен с входом упреждающих синхроимпульсов дискриминатора дальности и с входом первого элемента задержки, к выходу которого подключены вход второго элемента задержки, вход запуска блока захвата объекта на сопровождение, а также входы синхроимпульсов центрального строба сопровождения фильтра доплеровской частоты, частотного дискриминатора и дискриминатора дальности, вход запаздывающих синхроимпульсов которого соединен с выходом второго элемента задержки, выход регистра частоты соединен с первым входом второго сумматора, второй вход которого подключен к выходу частотного дискриминатора, а выход соединен с кодовым входом третьего генератора доплеровской частоты и с первыми входами третьего сумматора и второго вычитателя, вторые входы которых подключены к кодовой шине, а выходы подключены к кодовым входам соответственно второго и первого генераторов доплеровской частоты, дополнительно введены контрольный имитатор движения объекта, доплеровские коммутаторы сигналов суммарного и разностного каналов, датчик предстартовой подготовки, коммутатор питания, датчик скорости, датчик контрольного угла, первый и второй коммутаторы режима, первый и второй контрольные элементы задержки, триггер пуска, триггер отмены пуска, вентиль отмены пуска, направленный ответвитель, блок сравнения, инвертор сигнала и элемент И, при этом выход датчика предстартовой подготовки соединен с нулевым входом триггера пуска, единичным входом триггера отмены пуска и с входом второго контрольного элемента задержки, выход которого соединен с входом вентиля отмены пуска и с первым входом элемента И, выходы бинарно квантованных квадратурных сигналов блоков квадратурных фазовых детекторов и амплитудно-временных квантователей сигналов суммарного и разностного каналов подключены к информационным входам соответственно доплеровского коммутатора сигналов суммарного канала и доплеровского коммутатора сигналов разностного канала, управляющие входы которых соединены с выходом первого коммутатора режима, а выходы соединены с информационными входами соответственно цифрового согласованного фильтра сигналов суммарного канала и цифрового согласованного фильтра сигналов разностного канала, первый вход первого коммутатора режима соединен с выходом датчика скорости, формирующего код доплеровской частоты, пропорциональный скорости носителя РЛС, второй вход первого коммутатора режима подключен к первому - частотному - выходу контрольного имитатора движения объекта, второй выход - кода дальности - которого соединен с управляющим входом первого контрольного элемента задержки, выход которого соединен со вторым входом второго коммутатора режима, первый вход которого, а также вход первого контрольного элемента задержки подключены к выходу генератора кодов, вход запуска контрольного имитатора движения объекта, а также управляющие входы первого и второго коммутаторов режима подключены к инверсному выходу триггера пуска, выход которого соединен с управляющим входом коммутатора питания, посредством которого в режиме контроля производится выключение мощного источника питания усилителя мощности, выход второго коммутатора режима соединен с входом модуляции фазового манипулятора, выход которого через направленный ответвитель соединен с волноводным входом-выходом суммарно-разностного преобразователя, входы блока сравнения углов подключены соответственно к выходу датчика контрольного угла и выходу датчика углового положения антенны, а его выход соединен со вторым входом элемента И и через инвертор сигнала - с управляющим входом вентиля отмены пуска, выход которого подключен к нулевому входу триггера отмены пуска, выход триггера отмены пуска соединен с управляющим входом элемента И, выход которого подключен к единичному входу триггера пуска.
Кроме этого, в моноимпульсной радиолокационной системе доплеровские коммутаторы сигналов суммарного и разностного каналов содержат, каждый, первый и второй инверторы, первый и второй мультиплексоры, преобразователь кода, преобразователь код-время, задающий генератор, дешифратор нулевого кода и двухразрядный счетчик, при этом первый информационный вход доплеровского коммутатора, на который поступает сигнал с начальной нулевой фазой, непосредственно соединен с первым входом первого мультиплексора и с четвертым входом второго мультиплексора и через первый инвертор, сдвигающий фазу на 180°, соединен с третьим входом первого мультиплексора и со вторым входом второго мультиплексора 68, второй информационный вход доплеровского коммутатора, на который поступает сигнал с начальной фазой 90°, непосредственно соединен со вторым входом первого мультиплексора и с первым входом второго мультиплексора и через второй инвертор, сдвигающий фазу на 180°, соединен с четвертым входом первого мультиплексора и с третьим входом второго мультиплексора, выходы первого и второго мультиплексоров являются выходами доплеровского коммутатора, а их управляющие входы соединены с соответствующими выходами двухразрядного счетчика, вход преобразователя кода является управляющим входом доплеровского коммутатора, а его выход соединен с информационным входом преобразователя код-время, вход синхронизации которого соединен с выходом задающего генератора, к выходу которого подключен вход дешифратора нулевого кода, а к выходу дешифратора нулевого кода подключен вход двухразрядного счетчика и управляющий вход преобразователя код-время.
Сущность изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
фиг.1 - структурная схема моноимпульсной РЛС;
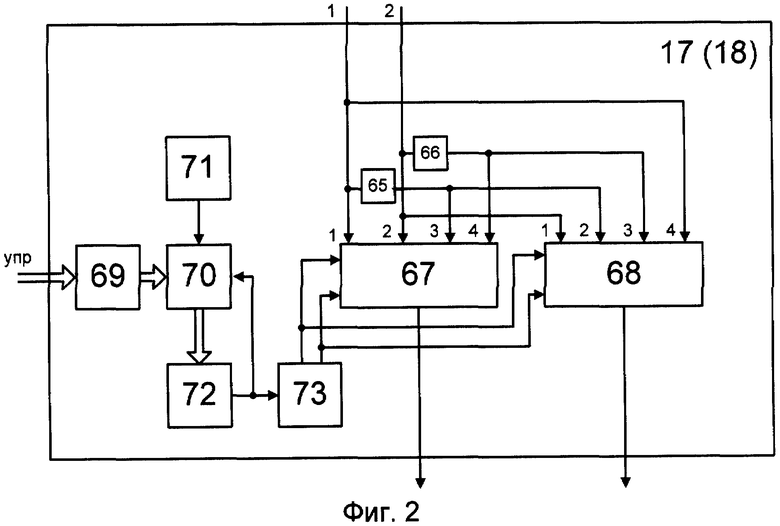
фиг.2 - структурная схема доплеровского коммутатора.
На фиг.1 структурной схемы моноимпульсной РЛС приняты следующие обозначения:
1 - возбудитель,
2 - фазовый манипулятор,
3 - усилитель мощности,
4 - антенный переключатель,
5 - антенна,
6 - синхронизатор,
7 - генератор кодов,
8 - импульсный модулятор,
9 - суммарно-разностный преобразователь,
10 - блок усилителей высокой частоты (УВЧ), состоящий из двух параллельно работающих каскадов УВЧ для сигналов суммарного и разностного каналов РЛС,
11 - блок смесителей, состоящий из двух параллельно работающих смесителей для сигналов суммарного и разностного каналов РЛС,
12 - блок усилителей промежуточной частоты (УПЧ), состоящий из двух параллельно работающих каскадов УПЧ для сигналов суммарного и разностного каналов РЛС,
13 - блок квадратурных фазовых детекторов и амплитудно-временных квантователей (ФД-АК) сигналов суммарного канала, включающий последовательного соединенные блок квадратурных фазовых детекторов и амплитудно-временной квантователь,
14 - блок квадратурных фазовых детекторов и амплитудно-временных квантователей сигналов разностного канала, выполненный аналогично блоку 13 ФД-АК,
15 - цифровой согласованный фильтр (ЦСФ) сигналов суммарного канала,
16 - ЦСФ сигналов разностного канала,
17 - доплеровский коммутатор сигналов суммарного канала, структурная схема которого приведена на фиг.2,
18 - доплеровский коммутатор сигналов разностного канала, выполненный аналогично доплеровскому коммутатору 17,
19, 20 - первый и второй коммутаторы режима соответственно,
21, 22 - первый и второй контрольные элементы задержки соответственно,
23 - блок вычисления модуля сигнала объединения квадратур,
24 - блок обнаружения и выбора объекта сопровождения (БОВО), выполненный аналогично блоку 24 обнаружения и выбора цели, структурная схема которого приведена на фиг.5 описания изобретения к патенту №2178896 (прототип), отличающийся тем, что в него дополнительно введен счетчик дальности,
25 - коммутатор сигналов управления приводом,
26 - привод антенны,
27 - датчик углового положения антенны,
28 - регистр угла,
29 - первый вычитатель,
30 - регистр дальности,
31 - первый сумматор,
32 - преобразователь кода во временной интервал,
33 - блок захвата объекта на сопровождение (БЗО), выполненный аналогично блоку 33 захвата цели, структурная схема которого приведена на фиг.6 описания изобретения к патенту №2178896 (прототип),
34 - регистр частоты,
35 - фильтр доплеровской частоты (ФДЧ), выполненный аналогично ФДЧ 35, структурная схема которого приведена на фиг.8 описания изобретения к патенту №2178896 (прототип),
36 - датчик предстартовой подготовки, выполненный, например, в виде генератора одиночных импульсов, который запускает процесс предстартовой подготовки,
37, 38 - триггеры пуска и отмены пуска соответственно,
39 - элемент И,
40 - вентиль отмены пуска,
41, 42, 43 - первый, второй, третий генераторы доплеровской частоты (ГДЧ) соответственно,
44, 45, - второй и третий сумматоры соответственно,
46 - угловой дискриминатор,
47 - второй вычитатель,
48 - кодовая шина, выполненная в виде набора контактов (проводников), подключенных к источникам нулевого и единичного потенциалов,
49 - блок вентилей,
50 - дискриминатор дальности, выполненный по известной схеме дискриминатора дальности по пат. №2178896, включающей блок сравнения сигналов полустробов с контролем по сигналу центрального строба,
51 - частотный дискриминатор, выполненный по известной схеме частотного дискриминатора по пат. №2178896, включающей блок сравнения сигналов двух боковых частотных фильтров с контролем по сигналу центрального частотного фильтра,
52 - датчик скорости,
53 - датчик контрольного угла,
54, 55 - первый и второй элементы задержки соответственно,
56 - блок сравнения углов,
57 - коммутатор питания, предназначенный для включения-выключения мощного (высоковольтного) источника питания усилителя мощности, выполненный в виде реле с нормально замкнутыми контактами,
58 - направленный ответвитель,
59 - контрольный имитатор движения объекта,
60 - инвертор сигнала,
61 - счетчик обратного счета,
62 - задающий генератор,
63 - генератор одиночных импульсов,
64 - кодовая шина имитатора.
Согласно структурной схеме фиг.1 антенна 5 кинематически связана с приводом 26 антенны и соединена с волноводным входом-выходом суммарно-разностного преобразователя 9, который через направленный ответвитель 58 соединен также с выходом фазового манипулятора 2.
Вход-выход сигналов суммарного канала суммарно-разностного преобразователя 9 через антенный переключатель 4 соединен с выходом усилителя 3 мощности и с входом сигналов суммарного канала блока 10 усилителей высокой частоты, вход сигналов разностного канала которого соединен с соответствующим выходом суммарно-разностного преобразователя 9.
Выход сигналов несущей частоты возбудителя 1 соединен с первым входом фазового манипулятора 2, второй вход (вход модуляции) которого соединен с выходом второго коммутатора 20 режима, а выход соединен с первым входом усилителя 3 мощности, вход высоковольтного источника питания которого через коммутатор 57 питания соединен с устройством распределения электропитания РЛС (для простоты не показано). Второй вход усилителя 3 мощности соединен с выходом импульсного модулятора 8, вход которого, а также вход генератора 7 кодов и запускающие входы блока 24 обнаружения и выбора объекта сопровождения и преобразователя 32 кода во временной интервал подключены к первому выходу синхронизатора 6, на котором формируется последовательность запускающих импульсов с частотой зондирования.
Ко второму выходу (синхронизирующих импульсов с частотой квантования принимаемых сигналов) синхронизатора 6 подключены входы синхронизации блока 24 обнаружения и выбора объекта сопровождения, блока 33 захвата объекта на сопровождение и входы синхронизации цифровых согласованных фильтров 15, 16 сигналов суммарного и разностного каналов.
Выходы сигналов суммарного и разностного каналов блока 10 усилителей высокой частоты соединены с соответствующими сигнальными входами блока 11 смесителей, гетеродинный вход которого соединен с выходом сигналов гетеродинной частоты возбудителя 1, а выходы сигналов суммарного и разностного каналов блока 11 смесителей через блок 12 усилителей промежуточной частоты соединены с входами соответственно блока 13 квадратурных фазовых детекторов и амплитудно-временных квантователей сигналов суммарного канала и блока 14 квадратурных фазовых детекторов и амплитудно-временных квантователей сигналов разностного канала, опорные входы которых подключены к выходу опорных сигналов возбудителя 1.
Выходы бинарно квантованных квадратурных сигналов блока 13 ФД-АК сигналов суммарного канала подключены к информационным входам доплеровского коммутатора 17 сигналов суммарного канала, выходы которого соединены с информационными входами цифрового согласованного фильтра 15 сигналов суммарного канала.
Выходы бинарно квантованных квадратурных сигналов блока 14 ФД-АК сигналов разностного канала подключены к информационным входам доплеровского коммутатора 18 сигналов разностного канала, выходы которого соединены с информационными входами цифрового согласованного фильтра 16 сигналов разностного канала.
Управляющие входы доплеровских коммутаторов 17 и 18, на которые поступает код доплеровской частоты, соединены с выходом первого коммутатора 19 режима, первый вход которого соединен с выходом датчика 52 скорости, формирующего код доплеровской частоты, пропорциональный скорости носителя РЛС, а второй подключен к первому (частотному) выходу контрольного имитатора 59 движения объекта, которым является выход кодовой шины 64 имитатора.
Второй выход (кода дальности) контрольного имитатора 59 движения объекта, которым является выход счетчика 61 обратного счета, соединен с управляющим (кодовым) входом первого контрольного элемента 21 задержки, выход которого подключен ко второму входу второго коммутатора 20 режима, первый вход которого, а также вход первого контрольного элемента 21 задержки и кодовые входы цифровых согласованных фильтров 15, 16 подключены к выходу генератора 7 кодов.
Счетный вход и вход запуска счетчика 61 обратного счета соединены соответственно с выходом задающего генератора 62 и выходом генератора 63 одиночных импульсов, вход которого, образующий вход запуска контрольного имитатора 59 движения объекта, а также управляющие входы первого и второго коммутаторов 19, 20 режимов подключены к инверсному выходу триггера 37 пуска, неинверсный выход которого соединен с управляющим входом коммутатора 57 питания.
Выход цифрового согласованного фильтра 15 сигналов суммарного канала соединен с информационными входами дискриминатора 50 дальности, частотного дискриминатора 51, блока 33 захвата объекта на сопровождение и блока 23 вычисления модуля сигнала объединения квадратур, выход которого соединен с первым входом блока 24 обнаружения и выбора объекта сопровождения, второй вход которого по сигналу текущего углового положения антенны соединен с выходом датчика 27 углового положения антенны, кинематически связанного с приводом 26 антенны.
К выходу цифрового согласованного фильтра 16 сигналов разностного канала подключен вход фильтра 35 доплеровской частоты, соединенного с первым входом углового дискриминатора 46, второй вход которого подключен к выходу дискриминатора 50 дальности.
Входы данных регистра 28 угла и регистра 30 дальности подключены к соответствующим информационным выходам блока 24 обнаружения и выбора объекта сопровождения, выход сигналов управления приводом которого соединен с первым входом коммутатора 25 сигналов управления приводом, а выход по сигналу окончания обзора соединен с управляющими входами коммутатора 25 сигналов управления приводом, с управляющими входами регистров 28, 30 угла и дальности и с управляющим входом блока 33 захвата объекта на сопровождение, информационный и управляющий выходы которого соединены с соответствующими входами регистра 34 частоты.
Выходы первого и второго генераторов 41, 42 доплеровской частоты соединены с входами частотных полустробов сопровождения по доплеровской частоте (1-й и 3-й входы) частотного дискриминатора 51, вход центральной частоты сопровождения (2-й вход) которого и соответствующие частотные входы дискриминатора 50 дальности и фильтра 35 доплеровской частоты соединены с выходом третьего генератора 43 доплеровской частоты.
Управляющий вход привода 26 антенны соединен с выходом коммутатора 25 сигналов управления приводом, второй вход которого соединен с выходом первого вычитателя 29, первый вход которого подключен в выходу регистра 28 угла, а второй соединен с выходом углового дискриминатора 46 через блок 49 вентилей, управляющий вход которого подключен к управляющему выходу блока 33 захвата объекта на сопровождение.
Выход регистра 30 дальности соединен с первым входом первого сумматора 31, второй вход которого соединен с выходом сигналов отклонения дискриминатора 50 дальности, а выход подключен к входу преобразователя 32 кода во временной интервал.
Выход преобразователя 32 кода во временной интервал соединен с входом упреждающих синхроимпульсов дискриминатора 50 дальности и входом первого элемента 54 задержки, к выходу которого подключены вход второго элемента 55 задержки, вход запуска блока 33 захвата объекта сопровождения, а также вход синхронизации фильтра 35 доплеровской частоты и входы синхронизации центрального строба сопровождения частотного дискриминатора 51 и дискриминатора 50 дальности. Выход второго элемента 55 задержки подключен к входу запаздывающих синхроимпульсов дискриминатора 50 дальности.
Выход регистра 34 частоты соединен с первым входом второго сумматора 44, второй вход которого подключен к выходу частотного дискриминатора 51, а выход соединен с кодовым входом третьего генератора 43 доплеровской частоты и с первыми выходами третьего сумматора 45 и второго вычитателя 47. Вторые входы третьего сумматора 45 и второго вычитателя 47 подключены к кодовой шине 48, а их выходы подключены к кодовым входам соответственно второго и первого генераторов 42 и 41 доплеровской частоты.
Выход датчика 36 предстартовой подготовки соединен с нулевым входом триггера 37 пуска, с единичным входом триггера 38 отмены пуска и входом второго контрольного элемента 22 задержки, выход которого соединен с первым входом элемента И 39 и входом вентиля 40 отмены пуска.
Соответствующие входы блока 56 сравнения углов соединены с выходом датчика 53 контрольного угла и выходом датчика 27 углового положения антенны, а его выход соединен со вторым входом элемента И 39 и через инвертор 60 сигнала - с управляющим входом вентиля 40 отмены пуска, выход которого подключен к нулевому входу триггера 38 отмены пуска.
Выход триггера 38 отмены пуска соединен с управляющим входом элемента И 39, выход которого соединен с единичным входом триггера 37 пуска.
Доплеровские коммутаторы 17, 18 сигналов суммарного и разностного каналов выполнены по схеме фиг.2, на которой обозначены:
65, 66 - первый и второй инверторы,
67, 68 - первый и второй мультиплексоры,
69 - преобразователь кода,
70 - преобразователь код-время,
71 - задающий генератор,
72 - дешифратор нулевого кода,
73 - двухразрядный счетчик.
Первый информационный вход доплеровского коммутатора 17 (18), на который поступает сигнал с начальной нулевой фазой, непосредственно соединен с первым входом первого мультиплексора 67 и с четвертым входом второго мультиплексора 68 и через первый инвертор 65, сдвигающий фазу на 180°, соединен с третьим входом первого мультиплексора 67 и со вторым входом второго мультиплексора 68.
Второй информационный вход доплеровского коммутатора 17 (18), на который поступает сигнал с начальной фазой 90°, непосредственно соединен со вторым входом первого мультиплексора 67 и с первым входом второго мультиплексора 68 и через второй инвертор 65, сдвигающий фазу на 180°, соединен с четвертым входом первого мультиплексора 67 и с третьим входом второго мультиплексора 68.
Таким образом, на входы каждого из мультиплексоров 67, 68 поступает последовательность сигналов со сдвигом фазы на 90°, причем фаза сигнала, поступающего на первый вход второго мультиплексора 68, сдвинута также на 90° относительно фазы сигнала, поступающего на первый вход первого мультиплексора 67.
Выходы первого и второго мультиплексоров 67, 68 являются выходами доплеровского коммутатора 17 (18), а их управляющие входы соединены с соответствующими выходами двухразрядного счетчика 73.
Вход преобразователя 69 кода является управляющим входом доплеровского коммутатора 17 (18), а его выход соединен с информационным входом преобразователя 70 код-время, вход синхронизации которого подключен к выходу задающего генератора 71, а выход соединен с входом дешифратора 72 нулевого кода, выход которого соединен с входом двухразрядного счетчика 73 и с управляющим входом преобразователя 70 код-время.
Радиолокационная система работает следующим образом.
В штатном режиме работы возбудитель 1 формирует сигнал несущей частоты, поступающий в фазовый манипулятор 2, сигнал гетеродинной частоты, поступающий в блок 11 смесителей, и опорный сигнал промежуточной частоты, поступающий на опорные входы блоков 13 и 14 ФД-АК сигналов суммарного и разностного каналов.
Синхронизатор 6 формирует запускающие импульсы с частотой зондирования и синхронизирующие импульсы с частотой квантования принимаемого сигнала. Запускающие импульсы поступают на вход генератора 7 кодов и на вход импульсного модулятора 8. При этом генератор 7 кодов формирует псевдослучайный двоичный код, поступающий через первый вход на выход второго коммутатора 20 режима, а с него - на вход модуляции (второй вход) фазового манипулятора 2, который изменяет фазу несущей частоты возбудителя 1 в соответствии с поступающим кодом.
Полученный при этом фазоманипулированный сигнал поступает на первый вход усилителя 3 мощности, высоковольтный источник питания которого в штатном режиме работы подключен к распределительному устройству системы электропитания РЛС через нормально замкнутые контакты коммутатора 57 питания. На второй вход усилителя 3 мощности поступает отпирающий импульс с импульсного модулятора 8. Выходной фазоманипулированный импульс с усилителя 3 мощности через антенный переключатель 4 и суммарный канал суммарно-разностного преобразователя 9 поступает в антенну 5 и излучается в пространство.
Принимаемый антенной 5 сигнал поступает в суммарно-разностный преобразователь 9, на выходах которого при этом формируются суммарный и разностный сигналы, поступающие через антенный переключатель 4 и непосредственно на соответствующие входы блока 10 усилителей высокой частоты, с выходов которого усиленные суммарный и разностный сигналы поступают в блок 11 смесителей, где они смешиваются с сигналом гетеродинной частоты возбудителя 1. При этом на выходах блока 11 смесителей формируются суммарный и разностный сигналы промежуточной частоты, поступающие в блок 12 усилителей промежуточной частоты, а с его выходов суммарный и разностный сигналы поступают соответственно на входы блоков 13 и 14 квадратурных фазовых детекторов и амплитудно-временных квантователей сигналов суммарного и разностного каналов. На опорные входы блоков 13 и 14 поступает опорный сигнал возбудителя 1, который в каждом из блоков 13, 14 смешивается с сигналом усилителя промежуточной частоты (УПЧ) непосредственно и со сдвигом фазы на 90°, в результате чего на выходах блоков 13 и 14 образуется по два квадратурных сигнала (синусный и косинусный) на видеочастоте, проквантованных с нулевым порогом.
Бинарно квантованные квадратурные сигналы с выходов блоков 13, 14 ФД-АК сигналов суммарного и разностного каналов поступают на информационные входы доплеровских коммутаторов 17, 18 сигналов суммарного и разностного каналов, на управляющие входы которых через первый коммутатор 19 режима поступает код доплеровской частоты с датчика 52 скорости, который интегрирует ускорения по продольной оси носителя РЛС (беспилотного летательного аппарата) и формирует код доплеровской частоты, пропорциональной скорости носителя.
В доплеровских коммутаторах 17 и 18 (см. фиг.2) входные информационные сигналы, сдвинутые по фазе на 90°, непосредственно и через инверторы 65, 66 образуют последовательность сигналов с начальными фазами 0°, 90°, 180°, 270° и поступают на входы с первого по четвертый первого мультиплексора 67, а также со сдвигом на 90° на второй, третий, четвертый и первый входы второго мультиплексора 68.
Код доплеровской частоты fД с управляющего входа доплеровского коммутатора 17 (18) поступает на вход преобразователя 69 кода, выполненного в виде программируемого запоминающего устройства и преобразующего код частоты fД в код, соответствующий периоду ТД доплеровской частоты, т.е. обратно пропорциональный коду частоты: ТД=1/fД.
С выхода преобразователя 69 указанный код поступает на информационный вход преобразователя 70 код-время, выполненного в виде счетчика с обратным счетом. На синхровход преобразователя 70 поступает сигнал от задающего генератора 71, частота которого выбрана так, чтобы временной интервал Т от момента записи кода в преобразователь 70 до момента его обнуления (путем обратного счета) составлял: Т=1/4 ТД.
Выходной сигнал преобразователя 70 код-время поступает в дешифратор 72 нулевого кода, который в момент обнуления счетчика преобразователя 70 формирует импульсный сигнал, поступающий на управляющий вход преобразователя 70 и записывающий в него вновь код периода доплеровской частоты с выхода преобразователя 69 кода, после чего начинается отсчет очередного интервала Т.
Импульсы с выхода дешифратора 72 нулевого кода поступают также на счетный вход двухразрядного счетчика 73, двухразрядный сигнал которого подается на управляющие входы мультиплексоров 67, 68.
При этом на выходах мультиплексоров и соответственно на выходах доплеровского коммутатора 17 (18) формируются два сдвинутых по фазе на 90° сигнала, в которых скомпенсирован набег фазы за счет собственной скорости носителя РЛС.
Эти сигналы с выходов доплеровских коммутаторов 17 и 18 поступают на информационные входы цифровых согласованных фильтров 15, 16, на кодовые входы которых в каждом интервале зондирования поступает и запоминается код фазовой манипуляции с генератора 7 кодов.
В цифровых согласованных фильтрах 15, 16 производится сжатие принимаемого сигнала путем вычисления корреляционной функции между принимаемым сигналом и кодом фазовой манипуляции зондирующего сигнала. При этом на выходах фильтров 15, 16 в каждый текущий момент времени формируется комплексный сигнал, соответствующий текущему кванту дальности и содержащий два сжатых квадратурных сигнала (синусный и косинусный) соответственно суммарного в ЦСФ 15 и разностного в ЦСФ 16 каналов РЛС.
Комплексный выходной сигнал цифрового согласованного фильтра 15 суммарного канала поступает в блок 23 вычисления модуля сигнала объединения квадратур, в котором происходит объединение квадратур по правилу "корень из суммы квадратов", в результате чего выходной сигнал блока 23 не зависит от начальной фазы принимаемого эхо-сигнала.
Выходной сигнал блока 23 вычисления модуля сигнала объединения квадратур поступает на первый вход блока 24 обнаружения и выбора объекта сопровождения (БО-ВО), работающий по известному принципу с учетом включения в схему блока 24 счетчика дальности. На синхронизирующий и запускающий входы блока 24 обнаружения и выбора объекта сопровождения поступают синхросигнал и запускающий сигнал от синхронизатора 6. При этом в БОВО 24 обеспечивается формирование кода текущего элемента дальности и текущего управляющего сигнала угла поворота антенны, поступающего с третьего выхода БОВО 24 через коммутатор 25 на управляющий вход привода 26 антенны, обеспечивая режим обзора.
В процессе обработки сигналов в БОВО 24 производится интегрирование в каждом элементе дальности сигналов, отраженных от соответствующих объектов, и сравнение их с порогом обнаружения. На второй информационный вход БОВО 24 поступает код от датчика 27 углового положения антенны.
При обнаружении объекта по принципу превышения порога интегрированным отраженным сигналом в БОВО 24 фиксируются угловые координаты, дальность и интенсивность сигнала, отраженного от объекта, выбирается объект с максимальной интенсивностью сигнала. В конце обзора на четвертом выходе БОВО 24 формируется управляющий сигнал окончания обзора.
Координаты угла и дальности обнаруженного объекта (с наибольшей интенсивностью отраженного сигнала из обнаруженных объектов) формируются на первом и втором информационных выходах БОВО 24 и записываются импульсом конца обзора с его четвертого выхода соответственно в регистр 28 угла и регистр 30 дальности. Одновременно импульс конца обзора поступает на управляющий вход коммутатора 25 сигналов управления приводом, переключая его в положение пропускания сигнала со своего второго входа, подключенного к выходу вычитателя 29.
Импульс конца обзора поступает также на управляющий вход блока 33 захвата объекта на сопровождение.
Сигнал с выхода регистра 30 дальности подается на первый вход сумматора 31, на второй вход которого поступает сигнал отклонения (рассогласования) дискриминатора 50 дальности, который перед началом работы имеет нулевой выходной сигнал. При этом на выходе сумматора 31 формируется сигнал, равный коду дальности максимальной обнаруженного объекта, который поступает на вход преобразователя 32 кода во временной интервал, на вход запуска которого из синхронизатора 6 поступает запускающий импульс в каждом зондировании.
Преобразователь 32 формирует на своем выходе импульсы, задержанные относительно зондирующего импульса РЛС на интервал времени, который в сумме с задержкой на элементе 54 задержки соответствует дальности до максимального обнаруженного объекта.
Выходной импульс преобразователя 32 через элемент 54 задержки поступает на вход запуска блока 33 захвата объекта на сопровождение, в котором производится анализ спектра отраженного от захватываемого на сопровождение объекта сигнала, поступающего на информационный вход БЗО 33 из цифрового согласованного фильтра 15, в элементе дальности, соответствующем поступающим с элемента 54 задержки импульсам. Код частоты максимального пика в спектре сигнала записывается в регистр 34 частоты управляющим импульсом окончания захвата объекта на сопровождение, который формируется на управляющем выходе блока 33 захвата объекта сопровождения и одновременно поступает на управляющий вход блока 49 вентилей, открывая его.
Далее начинается сопровождение выбранного объекта.
При этом код доплеровской частоты с выхода регистра 34 поступает на первый вход сумматора 44, на второй вход которого поступает сигнал с выхода частотного дискриминатора 51, обнуленного в начале сопровождения объекта. Выходной сигнал сумматора 44 поступает на кодовый вход генератора 43 доплеровской частоты, на выходе которого при этом формируется комплексный сигнал заданной частоты, который поступает на соответствующие частотные входы фильтра 35 доплеровской частоты, дискриминатора 50 дальности и частотного дискриминатора 51. На информационный вход дискриминатора 50 дальности подается комплексный сигнал с выхода цифрового согласованного фильтра 15, а на его входы синхронизации - синхронизирующие импульсы соответственно с выхода преобразователя 32 кода во временной интервал, с выхода элемента 54 задержки и с выхода элемента 55 задержки. Величина задержки элементов 54 и 55 равна половине интервала дискретизации фазы в зондирующем импульсе. При этом так же, как и в режиме захвата, синхросигнал с выхода элемента 54 задержки соответствует дальности захваченного и сопровождаемого объекта и является сигналом центрального строба сопровождения, а сигналы с выхода преобразователя 32 кода во временной интервал и выхода элемента 55 задержки соответствуют моментам упреждения и запаздывания на половину интервала дискрета кода фазовой манипуляции относительно установленной дальности до объекта и являются сигналами соответствующих полустробов сопровождения по дальности.
В дискриминаторе 50 дальности формируется оценка отклонения синхросигнала с выхода элемента 54 задержки от истинной дальности до цели. Указанный сигнал отклонения с выхода дискриминатора 50 дальности подается на второй вход сумматора 31, который своим выходным сигналом изменяет задержку импульсов, формируемых преобразователем 32 кода во временной интервал, относительно запускающих импульсов синхронизатора 6.
Таким образом, реализуется сопровождение цели с использованием центрального строба сопровождения и двух полустробов сопровождения в дискриминаторе 50 дальности.
Сигнал с выхода сумматора 44 поступает также на первые входы сумматора 45 и вычитателя 47, на вторые входы которых подается сигнал с кодовой шины 48, на которой установлен код половины дискрета доплеровской частоты ΔfД в блоке 33 захвата объекта сопровождения. Выходные сигналы вычитателя 47 и сумматора 45 подаются соответственно на входы генераторов 41 и 42 доплеровской частоты, которые генерируют сигналы доплеровской частоты, сдвинутые относительно частоты генератора 43 в разные стороны на половину дискрета доплеровской частоты ΔfД.
Выходные сигналы генераторов 41 и 42 поступают на соответствующие частотные входы частотного дискриминатора 51. На синхровход частотного дискриминатора 51 подается синхроимпульс с элемента 54 задержки, соответствующий центральному стробу сопровождения по дальности. На информационный вход частотного дискриминатора 51 поступает сигнал с выхода цифрового согласованного фильтра 15 сигналов суммарного канала. При этом в частотном дискриминаторе 51 формируются сигналы частотных полустробов сопровождения сигнала по доплеровской частоте, сдвинутых относительно центральной частоты сопровождения генератора 43 доплеровской частоты, а на его выходе формируется величина частотного рассогласования, которая с выхода дискриминатора 51 поступает на второй вход сумматора 44, сдвигая на соответствующую величину частоты, формируемые ГДЧ 41, 42, 43, и замыкая, таким образом, контур сопровождения сигнала по частоте.
Комплексный сжатый сигнал с выхода цифрового согласованного фильтра 16 сигналов разностного канала поступает на информационный вход фильтра 35 доплеровской частоты, на частотный вход которого поступает сигнал с выхода генератора 43 доплеровской частоты, а на синхровход поступает сигнал с выхода элемента 54 задержки, вследствие чего фильтр 35 доплеровской частоты работает в стробе сопровождения цели по дальности и в центральном частотном стробе сопровождения объекта для разностного канала РЛС.
Выходной комплексный сигнал фильтра 35 доплеровской частоты поступает на первый вход углового дискриминатора 46, на второй вход которого поступает комплексный сигнал суммарного канала с выхода дискриминатора 50 дальности. В угловом дискриминаторе 46 производится сравнение поступающих комплексных сигналов суммарного и разностного каналов и вырабатывается оценка углового рассогласования между направлением на объект и углом поворота антенны. Указанная оценка формируется на выходе углового дискриминатора 46 в виде кодового сигнала, который через открытый управляющим сигналом конца захвата (с управляющего выхода блока 33 захвата объекта сопровождения) блок 49 вентилей поступает на второй вход вычитателя 29, где вычитается из кода угла, поступающего на его первый вход из регистра 28 угла. Выходной сигнал вычитателя 29 через коммутатор 25 сигналов управления приводом поступает на привод 26 антенны и, таким образом, замыкает контур сопровождения объекта по углу.
Перед включением штатного режима работы выполняется контроль исправности РЛС в режиме предстартовой подготовки носителя, для чего датчиком 36 предстартовой подготовки формируется пусковой сигнал, устанавливающий триггер 37 в нулевое положение, триггер 38 отмены пуска в единичное положение и контрольный элемент 22 задержки на интервал контроля предстартовой подготовки.
Выходной сигнал с инверсного выхода триггера 37 пуска переключает коммутаторы 19 и 20 режимов в положение пропускания контрольных сигналов и запускает контрольный имитатор 59 движения объекта, формирующий на выходе кодовой шины 64 (и частотном выходе имитатора 59) код доплеровской частоты, поступающий через первый коммутатор 19 режима на управляющие входы доплеровских коммутаторов 17 и 18.
На втором выходе (кода дальности) контрольного имитатора 59 формируется код дальности, уменьшающийся со временем с заданной скоростью с помощью счетчика 61 обратного счета, устанавливаемого в максимальное положение запускающим сигналом генератора 63 одиночных импульсов. Задающий генератор 62, подключенный к счетному входу счетчика 61 обратного счета, обеспечивает постоянную заданную скорость уменьшения кода дальности, формируемого счетчиком 61.
Одновременно сигнал от генератора 7 кодов поступает на вход первого контрольного элемента 21 задержки, который задерживает его на интервал времени, соответствующий коду дальности, поступающему на управляющий вход элемента 21 задержки их контрольного имитатора 59, а затем выдает код генератора 7 через коммутатор 20 режима на вход модуляции фазового манипулятора 2.
Таким образом, на выходе фазового манипулятора 2 формируется ФМ сигнал, имитирующий эхо-сигнал от приближающегося с заданной скоростью объекта.
Одновременно нулевым сигналом с выхода триггера 37 пуска через коммутатор 57 питания отключается высоковольтный источник питания усилителя мощности, и усилитель 3 мощности не усиливает сигнал фазового манипулятора 2. В то же время выходной сигнал фазового манипулятора 2 через направленный ответвитель 58 поступает в суммарно-разностный преобразователь 9 и далее в приемный тракт РЛС.
Далее РЛС работает аналогично штатному режиму: сначала выполняется обнаружение имитируемого объекта с угловой координатой в середине сектора обзора, а затем выполняется захват имитируемого объекта на сопровождение. После захвата начинается сопровождение имитируемого объекта по дальности в соответствии со значением кода дальности, формируемым счетчиком 61, по частоте в соответствии со значениями кода, формируемого кодовой шиной 64 имитатора, и по углу. При этом вследствие того, что имитируемый сигнал через направленный ответвитель 58 поступает в суммарный и разностный каналы суммарно-разностного преобразователя 9 с одинаковой мощностью, угловой дискриминатор 46 формирует максимально возможный сигнал рассогласования, и контур углового сопровождения начинает отклонять антенну 5 с помощью привода 26 с максимальной скоростью, заложенной в контур углового сопровождения.
Сигнал с датчика 27 углового положения антенны поступает в блок 56 сравнения, на другой вход которого подан код от датчика 53 контрольного угла. В момент, когда поступающие коды сравняются, на выходе блока 56 сравнения вырабатывается импульсный сигнал, который в случае, если аппаратура исправна, совпадает по времени с выходным сигналом второго контрольного элемента 22 задержки. При этом оба указанных импульса поступают на входы элемента И 39, выполненного в виде элемента И, на выходе которого формируется сигнал, поступающий на вход единичной установки триггера 37 пуска.
Триггер 37 пуска переходит в единичное состояние и переводит систему в штатный режим, включая высоковольтный источник питания усилителя 3 мощности и переводя коммутаторы 19, 20 режима в штатное положение, в котором сигнал генератора 7 кодов без задержки подается на модулирующий вход фазового манипулятора 2, а на управляющие входы доплеровских коммутаторов 17, 18 поступает сигнал из датчика 52 скорости.
В случае, если сигналы блока 56 сравнения и элемента 22 задержки не совпадают, то через инвертор 60 сигнала открывается вентиль 40 отмены пуска, сигнал элемента 22 задержки проходит через вентиль 40 и устанавливает в нулевое состояние триггер 38 отмены пуска, выходной сигнал которого закрывает элемент И 39 и отменяет старт БПЛА.
Таким образом, в предлагаемой РЛС наряду с другими мерами повышения надежности реализуется процесс предстартовой подготовки, обеспечивающий полный контроль работоспособности РЛС и не допускающий старта БПЛА с неисправной аппаратурой, что исключает потерю БПЛА из-за возможной неисправности РЛС.
На основании приведенного описания и чертежей предлагаемая радиолокационная система может быть изготовлена при использовании известных комплектующих изделий и известного в радиоэлектронной промышленности технологического оборудования и использована на подвижных носителях в качестве РЛС для обнаружения и сопровождения объектов.
Источники информации
1. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М: Сов. Радио. 1970 г.
2. Справочник по радиолокации. / Ред. М. Сколник. - М: Сов. Радио. - 1978 г. - Т.4.
3. Патент РФ №2084919, МПК G01S 13/44, публикация 20.07.97 г.
4. Патент РФ №2178896, МПК G01S 13/44, публикация 27.01.2002 г., прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| КОМПЛЕКС БОРТОВОЙ АППАРАТУРЫ СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2290681C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
Изобретение относится к радиолокационным системам (РЛС) с импульсным фазоманипулированным зондирующим сигналом, используемым на подвижных носителях, преимущественно на беспилотных летательных аппаратах (БПЛА), и предназначенным для обнаружения и сопровождения моноимпульсным способом сигналов от объектов назначения (целей). Сущность изобретения заключается в том, что предлагаемая моноимпульсная радиолокационная система, содержит возбудитель, фазовый манипулятор, усилитель мощности, антенный переключатель, антенну, синхронизатор, генератор кодов, импульсный модулятор, суммарно-разностный преобразователь, блок усилителей высокой частоты, блок смесителей, блок усилителей промежуточной частоты, блоки квадратурных фазовых детекторов и амплитудно-временных квантователей, цифровые согласованные фильтры, блок вычисления модуля сигнала объединения квадратур, блок обнаружения и выбора объекта сопровождения, коммутатор сигналов управления приводом, привод антенны, датчик углового положения антенны, регистр угла, первый вычитатель, регистр дальности, первый сумматор, преобразователь кода во временной интервал, блок захвата объекта на сопровождение, регистр частоты, фильтр доплеровской частоты, генераторы доплеровской частоты, сумматоры, угловой дискриминатор, второй вычитатель, кодовую шину, блок вентилей, дискриминатор дальности, частотный дискриминатор, первый и второй элементы задержки, контрольный имитатор движения объекта, доплеровские коммутаторы сигналов суммарного и разностного каналов, датчик предстартовой подготовки, коммутатор питания, датчик скорости, датчик контрольного угла, первый и второй коммутаторы режима, первый и второй контрольные элементы задержки, триггер пуска, триггер отмены пуска, вентиль отмены пуска, направленный ответвитель, блок сравнения, инвертор сигнала и элемент И. В результате использования изобретения повышается надежность РЛС при установке на БПЛА. 1 з.п. ф-лы, 2 ил.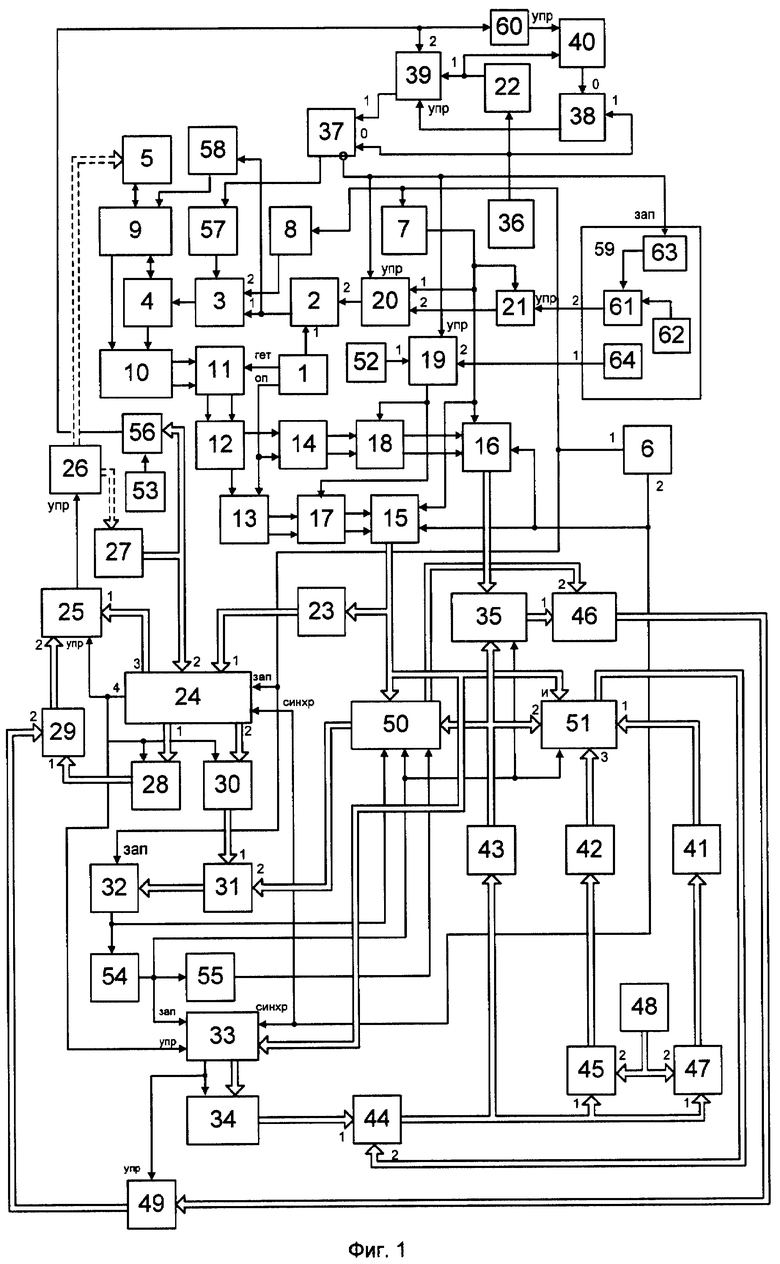
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| US 6118402 А, 12.09.2000 | |||
| ЕР 1012623 А1, 28.06.2000 | |||
| Устройство для измерения геометрии зеркального отражателя | 1987 |
|
SU1500952A1 |

