(5) КУЛАЧКОВЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения по дуге при стереофотосъемке | 1988 |
|
SU1597851A1 |
| Кулачковый механизм | 1979 |
|
SU911074A1 |
| ИМПУЛЬСНЫЙ МЕХАНИЧЕСКИЙ ВАРИАТОР | 1991 |
|
RU2011075C1 |
| Кулачковый механизм | 1980 |
|
SU937847A1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| Устройство для преобразования возвратно-поступательного движения во вращательное | 1981 |
|
SU976158A1 |
| Кулачковый механизм | 1980 |
|
SU1000635A1 |
| ВАЛКОВАЯ (РОЛИКОВАЯ) ПОДАЧА ЗАГОТОВОК В ЗОНУ ОБРАБОТКИ | 1998 |
|
RU2158647C2 |
| Индикатор направления искривления наклонных скважин | 1990 |
|
SU1754892A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОИЗОЛИРУЮЩЕГО УСТРОЙСТВА КОМПАКТНОГО СИДЕНЬЯ ДЛЯ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2214335C2 |
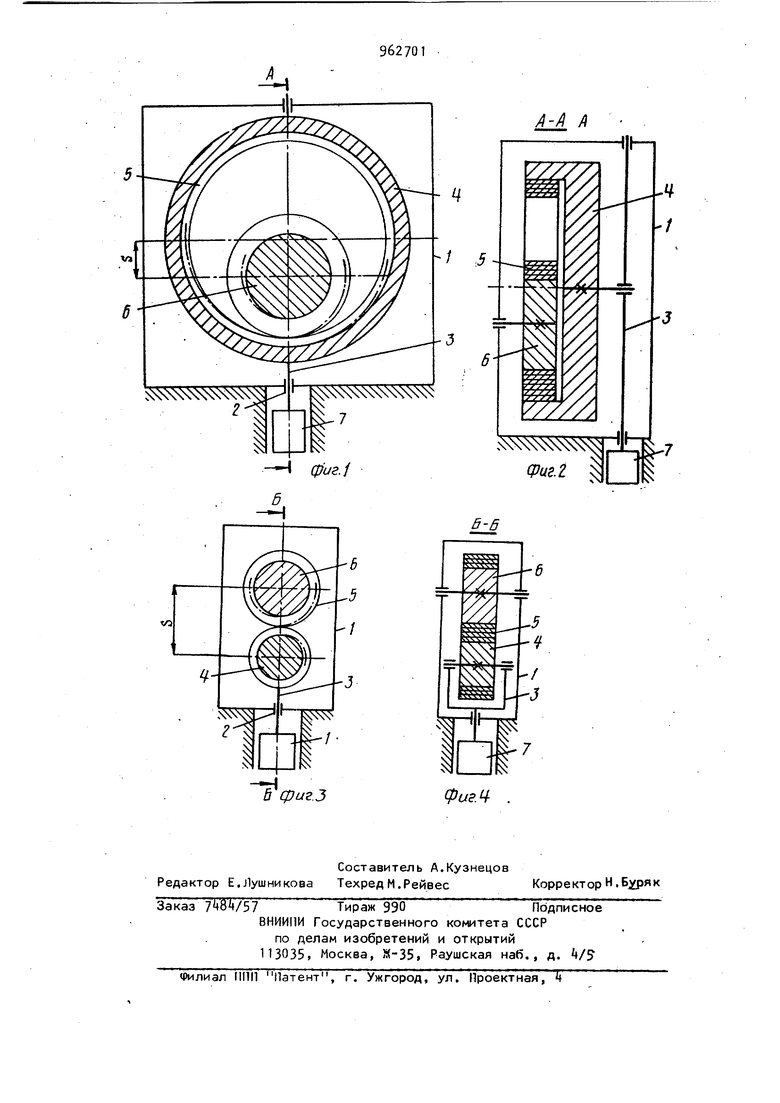
Изобретение относится к машиностроению, а именно, к кулачковым ме ханизмам. Известен кулачковый механизм, со держащий корпус, размеьценные в нем ведущий вал с кулачком и взаимодействующее с ним ведомое звено 1 . Недостатком механизма является его малая точность, вследствие повышенного износа профиля кулачка. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является кулачковы механизм, содержащий корпус с направляющими, взаимодействующее с ними ведомое звено, установленный в корпусе с возможностью вращения относительно него ролик, и связанную с ним одним концом упругую ленту t 2 Недостатком известного механизма является невысокая точность характе ристик перемещения ведомого звена вследствие отсутствия в механизме элементов фиксирования ведомого звена в заданном положении. Цель изобретения - увеличение точности характеристик перемещения ведомого звена., Поставленная цель достигается тем, что кулачковый механизм, содержащий корпус с направляющими,взаимодействующее с ведомое звено, установленный в корпусе с возможностью вращения относительно него ролик и связанную с ним одним концом упругую ленту , снабжен установленными в корпусе соответственно с возмсякност ью вращения относительно ведомого звена дополнительным роликом и с возможностью линейного перемещения относительно него и связанным с ведомым звеном фиксирую1чим элементом, упругая лента, связана другим концом с дополнительным роликом, а оси вращения основного и дополнительного роликов параллельны друг другу и перпендикулярны направляющим корпуса. 39 На фиг. 1 изображена схема кулачкового механизма с внутренним контак том звеньев| на фиг. 2 - разрез А-А на фиг. 1J на фиг. 3 схема кулачкового механизма с внешним контактом звеньев} на фиг. k - разрез §-Б на фиг. 3Кулачковый механизм содержит корпус 1 с направляющими 2, взаимодействующее с ними ведомое звено 3, Установленный в корпусе 1 с возможностью вращения относительно него ролик t, связанную с ним одним концом упругую ленту 5, установленный в кор пусе 1 с возможностью вращения относительно ведомого звена 3 дополнител ный ролик 6, установленный в корпусе 1 с возможностью линейного перемещения относительно дополнительного ролика 6 и связанный с ведомым звеном 3 фиксирующий элемент 7. Упругая лен та 5 связана с упругим концом с дополнительным роликом 6. Оси вращения основного 6 и дополнительного 6 роликов параллельны друг другу и пер-.пёндикулярны направляющим 2 корпуса 1. Кулачковый механизм работает следующим образом При вращении дополнительного роли ка 6 упругая лента 5 наматывается (или сматывается) на дополнительный ролик 6, одновременно сматываясь (или наматываясь) с ролика 4. Дополнительный ролик 6 вращается в опорах корпуса 1. Ролик k вращается в опорах ведомого звена 3 за счет силы трения между витками упругой ленты 5, роликом 4 и дополнительным роликом 6. Необходимое усилие трения создается силой сопротивления движению фиксирующего элемента 7. При достаточной силе сопротивления качения ролик;а k и дополнительного ролика 6 в месте контакта осуществляется без проскальзывания по ленте 5. При вза14имодействии дополнительного ролика 6 с роликом 4 изменяется расстояние между их осями вращения и ведомое звено 3 перемещается в направляющих 2корпуса 1, При достижении заданного перемещения вращение дополнительного ролика 6 реверсируется. Предложенный кулачковый механизм обладает простотой конструкци1, малыми габаритами, большой точностью характеристик перемещения ведомого звена и возможностью фиксирования его в требуемом положении. Формула изобретения Кулачковый механизм, содержащий корпус с направляющими, взаимодействующее с ними ведомое звело, установленный в корпусе с возможностью вращения относительно него ролик, и связанную с ним одним концом упругую ленту, отличающийся тем, что, с целью увеличения точностных характеристик перемещения ведомого звена, он снабжен установленными в корпусе соответственно с возможностью вращения относительно ведомого звена дополнительным роликом и с возможностью линейного перемещения относительно него и связанным с ведомым звеном фиксирующим элементом, упругая лента связана другим концом с дополнительным роликом, а оси вращения ОСНОВНОГО) и дополнительного роликов параллельны друг другу и перпендикулярны направляющим корпуса. Источники информации, принятые во внимание при экспертизе 1.Артоболевский И.И. Механизмы в современной технике. М., Наука, 1975, т. k, с. 19, фиг. 690. 2.Авторское свидетельство СССР N 7бЗбЗ, кл. F 16 Н , 1978.
