(54) КУЛАЧКОВЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| УСТРОЙСТВО для ПОДАЧИ ПЛЕНКИ К ТРАНСПОРТИРУЮЩЕМУ МЕХАНИЗМУ КИНОАППАРАТА | 1973 |
|
SU372850A1 |
| Устройство для комбинированного управления двигателем и муфтой сцепления транспортного средства | 1988 |
|
SU1523415A1 |
| УДАРНЫЙ МЕХАНИЗМ | 2015 |
|
RU2610320C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1995 |
|
RU2091637C1 |
| ВАРИАТОР | 2018 |
|
RU2678179C1 |
| ВАРИАТОР | 2018 |
|
RU2762220C1 |
| Стенд для испытаний зубьев зубчатых колес при динамических нагрузках | 1980 |
|
SU1010486A1 |
| Устройство для ресурсных испытаний тракторов по кольцевой дорожке | 1985 |
|
SU1303876A1 |
I
TlsoGpeieHHe относится к машиностроению, а именно к кулачковым механизмам.
Известен кулачковый механизм, содержащий корпус, установленный в нем ведущий вал с кулачком, взаимодействующий с кулачком одним концом рычаг, другой конец которого шарнирно связан с промежуточным звеном, взаимодействующим с ведомым звеном 1.
Наиболее близким по технической сущности и достигаемому результату к изобретению является кулачковый механизм, содержаадай корпус, установленные в нем ведущий вал с кулачком, взаимодействующий с кулачком одним концом рычаг, другой конец которого шарнирно связан с корпусом, промежуточное и ведомое звенья,установленные с возможностью вращения относительно корпуса,и два ролика.
Недостатком известных механизмов является невозможность регулирования параметров движения ведомого звена.
Целью изобретения является обеспечение возможности регулирования параметров движения ведомого звена.
Указанная цель достигается тем, что в кор пусе параллельно осям вращения промежуточного и ведомого звеньев выполнены две направляющие, механизм снабжен двумя тягами, установленными в направляющих с возможностью перемещения вдоль них, жестко связанной с ведомым звеном платформой,имеющей профилированную поверхность и двумя дополнительными роликами,связанными с одной из тяг и взаимодействующими с рычагом и промежуточным
10 звеном,два основных ролика связаны с другой тягой и взаимодействуют с промежуточным звеном и профилированной поверхностью, а оси враихения ведущего вала и рычага параллельны между собой и перпендикуляр15ны плоскости, проходящей через оси вращения промежуточного и ведомого звеньев.
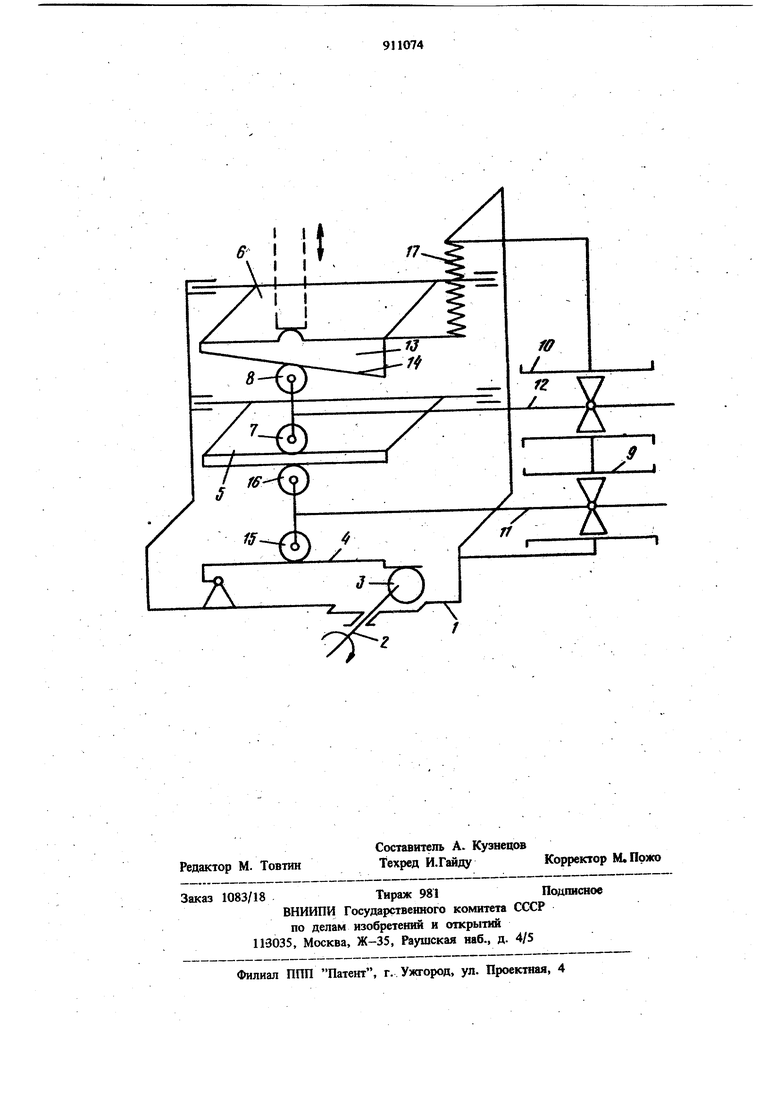
На чертеже изображена схема механизма.
Кулачковый механизм содержит корпус 1, установленные в нем ведущий вал 2 с кулач20ком 3, взаимодействующий с кулачком 3 одним концом рычаг 4, другой конец которого щарнирно связан с корпусом 1, промежуточное 5 и ведомое 6 звенья, установленныв с возможностью вращения относительно корпуса 1, два ролика 7 и 8. В корпусе 1 параллельно осям вращения промежуточного 5и ведомого 6i звеньев выполнены две направляющие 9 и 10. Механизм также содержит две тяги 11 и }2,установленныс в направляю щих 9 и 10 с возможностью перемещения вдоль них, жестко связанную с ведомым звеном 6платформу 13, имеющую профилированную поверхность 14, два дополнительных ролика IS и 16, связанные с первой тягой 11 и взаимодействуюиЁ(ие с рычагом 4 и промежуточным звеном S и профилированной поверхностью 14, а оси вращения ведущего вала 2 и рычага 4 параллельны между собой и перпендикулярны плоскости, проходящей через оси вращения промежуточного 5 и ведомого 6 звеньев. Силовое зшыкание механизма осуществляется упругим элементом 17. Кулачковый механизм работает следующим образом. При сообщении движения ведущему валу 2 кулачок 3 сообщает рычагу 4 колебательное движение, которое через Дополнительные ролики 15 и 16, промежуточное звено 5, основные ролики 7 и 8, платформу 13 с профилированной поверхностью 14 передается на ведомое звено 6. Амплитуда переменной составляющей колебаний регулируется посредством перемещения тяги 11 в направляющих 9, а среднее значение колебаний регулируется при перемещении тяги 12 в напра ляющих 10. Таким образом, устройство позволяет осуществлять регулирование как среднего значения, так и амплитуды переменной составляющей колебаний ведомого звена 6, что позволяет расширить диапазон спектральных характеристик перемещений исполнительных элементов. Кулачковый механизм может быть применен в гидравлических следящих системах при анализе действующих на устройства механических возмущений. Формула изобретения Кулачковый механизм, содержащий корпус, установленные в нем ведущий вал с кула.чком, взаимодействующий с кулачком одним концом рычаг, другой конец которого щарнирно связан с корпусом, промежуточное и ведомое звенья, установленные с возможностью вращения относительно корпуса, и два ролика, отличающийс я тем, что, с целью обеспечения возможности регулирования параметров движения ведомого звена, в корпусе параллельно осям вращения промежуточного и ведомого звеньев выполнены две направляющие, механизм снабжен двумя тягами, установленными в направляющих с возможностью перемещения вдоль них, жестко связанной с ведомым звеном платформой, имеющей профилированную поверхность, и двумя дополнительными роликами, связанными с одной из ТЯГ; и взаимодействующими с рычагом и промежуточным звеном, два основных ролика связаны с другой тягой и взаимодействуют с промежуточным звеном и профилированной поверхностью, а оси вращения ведуще го вала и рычага параллельны между собой и перпендикулярны плоскости, проходящей через оси вращения промежуточного и ведомого звеньев. Источники информации, принятые во внимание при экспертизе 1. Артоболевский И. И. Механизмы в современной технике. М., Наука. 1975, с. 150, фиг. 897. Там же, с. 225, фиг. 999 (прототип).
15
