(54) гаДРАВЛИЧЕСКИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая судовая рулевая машина | 1981 |
|
SU958227A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1105392A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU921964A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1062130A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1126497A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU768694A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU738944A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU770927A1 |
| Гидравлический привод судовой рулевой машины | 1984 |
|
SU1197939A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1082684A1 |
.1. Изобретение относится к гвдроавтомагике и может быть использовано йпя управления рулевыми машинами судовых рулей. Известен гидравлический привод, например для рулевой машины, содержащий четырехкамерный исполнительный гидродвигатель, реверсивный насос и клапан ИЛИ, входами связанный с гидролиниями насоса и двумя камерами гидродвкгатвля, а выходом - с гидравлическт м устройством автоматичесхого управления, включающий четырехлинейный распределитель с полостями управления, соединеннь1й с гидролиниями насоса и двумя другими камерами гидродвигатедя 13. Недостатками известного привода я& ляются низкие быстродействие и КПД, так как в нем обеспечивается лишь двух ступенчатое регулирование исполнительно гидррдвигетеля в процессе автА 1атическо управления. Цель изобретения - повышение быстродействия и КПД. Указанная цель достигается , что устройство автоматического управления снабжено -двухпозтшонным распределителем с нормально закрытым и нормально открытым входами и одним выходом. и с двумя полостями управлениг, а также двумя пороговыми гидроматшуляторами, каждый вз которых имеет TIO два входа и выхода, толкатель и подпружиненный золотник, соответственно образующие в корпусе гидроманипулятора командные полости меньшего н большего диаметров, сообщенные между собой, и дренажную полость, соединенную с командной полостью большего диаметра через регулируемый дроссель, при этом один вход первого гидроман1шулятора соединен с выходом клапана ИЛИ, другой - со , а выходы - с входами второго пзд романипулятора и входами двухпозишюнн ного распределителя, причем выход, сое диневный с нормально закрытым оходсм последнего, соединен с одной из полостей управления..четырехлинейного распредели
теля, вторая полость управления которог соеаинена с выходом двухпозиционного распределитепя, а полости управления последнего - с выходами второго гидроманипулятора..
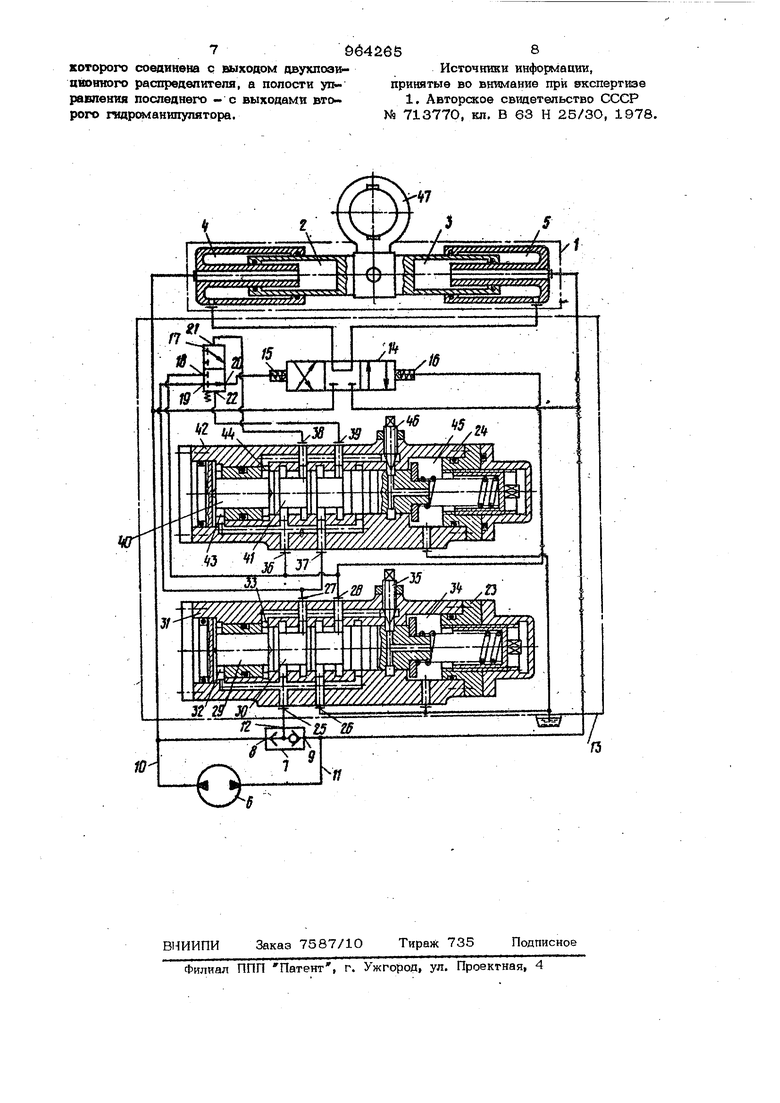
На чертеже изображена схема гидравлического привода,
Гидравлютаский привод содержит исполнительный гидродвигатель 1 с четырь мя камерами 2-5, реверсивный иасос 6, и клапан ИЛИ 7, входами 8 и 9 связанный с гвдролиниями 10 и 11. насоса и камерами 2 и 3 гидродвигателя 1, а выходом 12 с гидравлическим устройством 13 автоматического управления, включающим трехпозицконный четырехлинейный распределитель 14 с полостями
15и 16 -правления, соединенный с гидролиниями 10 и 11 и камерами 4 и 5,
а также двухпозиционный распределитель 17 с нормально закрытым входом 18, нормально открытым входом 19, выходом 20 и с полостями 21 и 22 управления и два пороговых гидроманипулятора 23 и 24, первый из которых имеет входы 25 и 26, выходы 27 и 28, толкатель 29 и подпружиненный золотник 30, соответственно, образующие в корпусе 31 командные полости меньшего 32 и большего 33 диаметров, сообщенные между собой, и дренажную полость 34, зоединен ную с полостью 33 через регулируемый дроссель 35; второй гидроманшхулягор 2.4 имеет входы 36 и 37, .выходы 38 и 39, толкатель 4О и подпрунсиненнкй золотник: 41, соответственно обр(.гзующие в корпусе 42 командные полости меньшепэ 43 и большего 44 диаметров, сообщенные между собой, и дренажную полость 45, соединенную с полостью 44 через регулируемый дроссель 46, При этом вход 25 гидроманипулятора 23 соединен с выходом 12 клапана ИЛИ 7, вход 26 со сливом, а выходы 27 и 28 - с входами 36 и 37 гид рома нгахуля тора 24 к входами 18 и 19 распределителя 17, причем выход 28 соединен с полостью
16управления распределителя 14, полость 15 управления которого соединена с выходом 20 распределителя 17, а полости 21 и. 22 управления последнего с выходами 38 и 39 гидроманипуляго-ра 24, Выходной элемент 47 пздродвигатепя 1 соединен с судовым рулем (не .показан).
Гидравлический привод работает следу ющу. образом.
При перемещении руля из нулевого (исходного) в крайнее правое положение
рабочая жшцсость, нагнетаемая насосом 6, через клапан ИЛИ 7 поступает в командную полость 32 гидроманипупятора 23 и через выход 27 последнего - к входу 37 гидроман шулятора 24 и входу 19 распределителя 17, полость 22 управления которого соединена с выходом 39 гидроманипулятора 24, Распр&депитель 17 при этом включен в положение, при котором полость 15 управп&ния распредел.ителя 14 соединена с входом 19 распределителя 17 Командная полость 43 и вход 36 гидроманипулятора 24, полость 21 распределителя 17 и полость 16 распределителя 14 соедине через вход 26 и выход 28 гидроман шулятора 23 со сливом.
Распределитель 14 переключается в положение, при котором камеры 2 и 3 соединяются с насосом 6 по дифференци альной схеме, рабочий объем исполнительгного гидродв11гаТеля 1 принимает минимальное значение, а перекладка руля производится с максимальной скоростью.
При увеличении нагрузки на руле и давления насоса 6 толкатель 29. а вмеоте с ним и золотник 30 перемешаются вправо, а рабочая жидкость ю дренажной полости 34 перепускается в командную полость 33 равного ей сечения через регулируемый дрос(ель 35, С по.: мощью дросселя 35 устанавливается н&обходимая скорость переключения гидро- манипулятора 23 v исключается возможность его ложного срабатывания при случайном резком возрастании или умень шении нагрузки.
При достижении максимального порогового уровня давления срабатывания золотшпс 30 гидромашшу,пятора 23 разъединяет командную 33 и дренажную 34 полости. В то же время командная полость 33 соединяется с нагнетанием насоса 6 и резко увелич1 -шается усилие, действующее на золотник 30. Вследствие этого золштник 30 переключается в крайнее правое положение, при котором нагнетание насоса 6 соединяется гилромашшулятором 23 с полостью 16 распределителя 14, входом 18 распределителя 17, входом 36 и командной полостью 43 падроманшту- лятора 24, а также с полостью 21 распрделителя 17, а повесть 22 распредепителя 17 гвдромашшупяторами 24 к 23 соединяется со сливом.
Таким о6ре.зом расщзедвлнтель 17 переключится в положение, при котором полости 15 и 16 расщдадешггепя 14 одновременно соединены с нагнетанием на- 59 coca 6. Распределитель 14 переключает в среднее положение, камеры 4 и 5 сое диняются через распределитель 14, рабочий объем исполнительного гидродвига теля 1 ун личивается и скорость перекладки руля принимает промежуточное значение. С увеличением рабочего объем исполнительного гидродвигателя 1 падает давление насоса б, а обратное переключение золотника 30 исключается за счет соответствующего выбора отношени площадей толкателя 29 и золотника ЗО и регулгфования дросселя 35. При возрастании давления золотник 30 гидроманипулятора 23 остается в переключенном положении, тош:атель 40 и золотник 41 гидроманипулятора 24 на чинают перемещаться вправо, а рабочая жидкость из дренажной полости 45 пере пускается Б командную полость 44 равн го ей сечения через регулируемый дроссель 46. При достижении максимального порогового уровня давления срабатывания золотник 41, командная полость 44 подключаются к нагнетанию насоса 6 через вход 36 гидроманипулятора 24 и вход 25 гидроманипулятора 23. Вслед ствие резкого увеличения усилия, золотник 41 переключается в правое положение, полость 22 распредел1ггеля 17 соединяется гидроманипулятором 24 с нагнетанием насоса 6, а полость 21 через выход 32 гидромашшупятора 24 и вход 26 гидроманипулятора 23 - со сли вом. Распределитель 17 переключается и и полость 15 распределителя 14 соединяется со сливом. Распределитель 14 переключится и камеры 4 и 2 исполн№тельного гидродвигателя 1 соединяются с нагнетанием насоса 6, а камеры 5 и 3 - со сливом. Рабочий объем исполнительного гидродвигателя прин51мает максимальное значение, а угловая скорость перекладки руля - минимальное значение при обеспечении на максимальных углах перекладки номинальных нагрузоч 1ых хаpaKTepvicTiQc. В момент переключения пр исходит yN-ieHbmeuue давлении в командных полостях 43 и 44 гvIдpoмaшшyлятoра 24, обратное срабатывание которого исключается за счет соответствующего выбора площадей поперечных сечений толкателя 40 и золотника 41 и регулт рования дросселя 36. При перекладке руля из крайнего правого положения в нулевое работа при вода происходит в обратной последовательности реверс1фованием насоса 6. 5 Работа привода при перекладке руля из нулевого в крайнее левое положение и обратно осуществляется аналогично. ТакнК образом, в гидравлическом пр1Шоде дост 1гается сокращение време- ни переключешш- выходного элемента гидродвкгатсля рулевой машины и связанного с ним судового руля, а также сниже те при этом потребляемой насосом мощности за счет увеличения числа ступеней регулирования исполнительного гидродвигателя в процессе автоматического управле гал. Использование данного изобретения для управления рулевыми машинами судовых рулей позволит повысш ь тпс быстро- действич и КПД и, тем саг.ым, эффективность их использования. Формула изобретения Гидравлический привод, например, для рулевой машины, содержащ11й четырехкамерный исполнительный гидродвигатель, реверсивный насос и клапан ИЛИ, входами связанный с гидролкниями насоса и двумя камерами гидродвигателя, а выходом - с гидравлическ1 М устройством автоматического управления, включающим чeтыpexлvшeйный распределитель с полостями управления, соединенный с гвдролиниями насоса и двумя другими камерами гвдродвигатепя, о т- л и ч а ю вд и йс я тем, что, с целью повышения быст родейс вия и КПД, устройство автомат; ческого управлети снабжено двухпоз 1цион1а 1м pacпpeдeлитeлe с нормально закрытым и нормально открытым входами и одним выходом к с двумя полостями управления, а также двумя пороговыми гид рома кттуляторами, каждый из которых viMeeT по два входа и выхода, толкатель и подпружиненньИ золотник, соотвегств&йно образующие в корпусе гвдроман шуля- тора командные полости меньщего и боль- uiero диаметров, сообщенные между собой, и дренажную полость, соединенную с командной полостью большего диаметра через регул1фуемый дроссель, при этом один вход первого гидроманипупятора соединен с выходом клапана ИЛИ, - со сл1том, а выходы - с входами второ- , го гидроманипулятора и входами двухпозттионного распределителя, причем выход, соединенный с нормально закрытым входом последнего, соединен с одной ю полоогей. управления четырех лушейного раодределителя, вторая полость управления
7D642eS
которого соединена q выходом двухпоаициовкого распредепитепя, а полости управления последнего - с выходами второго падр 1анш1улятора.
Источники информации, принятые во внимание при вгкспертиэе 1. Авторское свидетельство СССР № 713770, кл. В 63 Н 25/ЗО, 1978.
