(5) ГИДРАВЛИЧЕСКАЯ СУДОВАЯ РУЛЕВАЯ МАШИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод | 1981 |
|
SU964265A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1105392A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1062130A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1082684A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1126497A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU921964A1 |
| Судовая рулевая машина | 1979 |
|
SU839861A1 |
| Нагружающее устройство для испытанияРулЕВыХ МАшиН | 1979 |
|
SU844482A1 |
| Силовой гидравлический привод судового руля | 1981 |
|
SU1079545A1 |
| Гидравлический привод судовой рулевой машины | 1984 |
|
SU1197939A1 |
1
Изобретение относится к судостро- ению, в частности к гидравлическим судовым рулевым машинам.
Известна гидравлическая судовая рулевая машина, содержащая исполнительный механизм многокамерной конст рукции, кинематически связанный с румпелем и гидравлическим посредством нагнетающей и сливной магистралей соединенной с насосом, гидроклапанами ИЛИ и распределителем, имеющим управляющие камеры, каналы в корпусе и снабженным гидравлическим устройством управления и бак со 1.
Недостатком данного технического решения является то, что оно не обеспечивает отключение от насоса шунтируемых камер механизма, необходимое при соответствующем уменьшении давления в нагнетающей магистрали, что снижает эффективность и надежность
работы рулевой машины.
Цель изобретения - повышение надежности и эффективности работы рулевой машины.
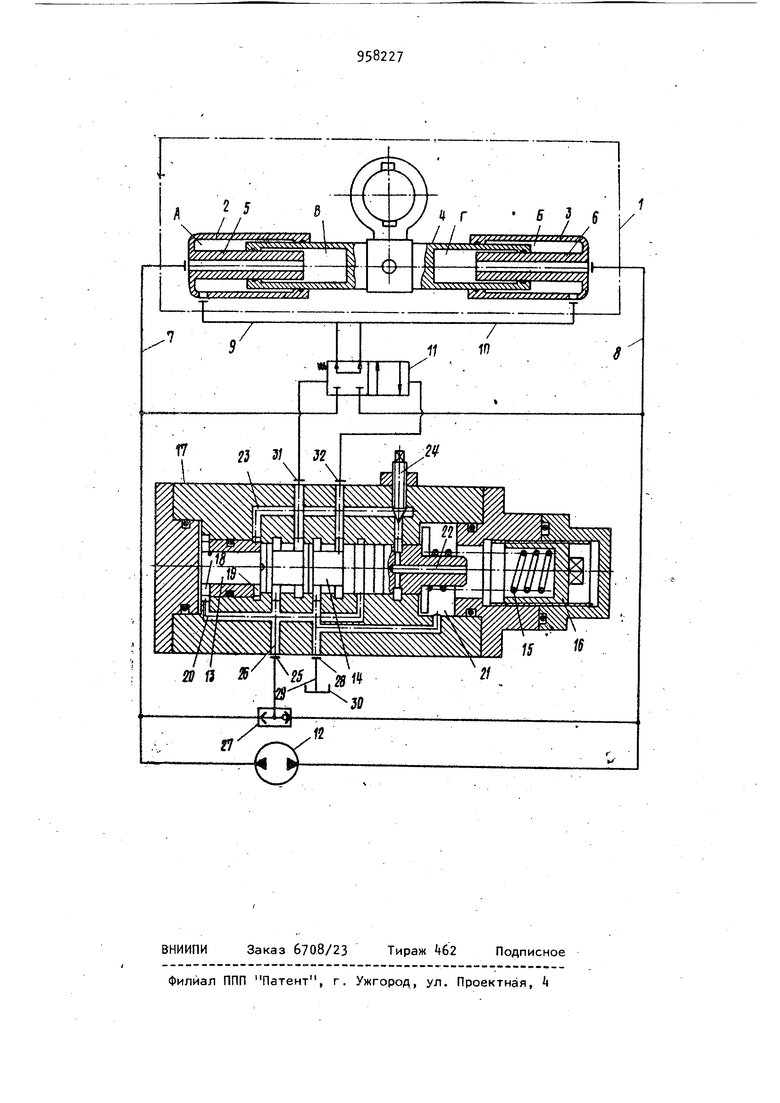
Поставленная цель достигается тем, что гидравлическое устройство управления выполнено в виде порогового гидроманипулятора, состоящего из поршня и подпружиненного пилотного золот10ника больше гр, чем поршень диаметра, образующих в корпусе гидроманипулятора две командные полости меньшего и большего поперечного сечения, которые соединены между собой через каналы в
5 корпусе и дренажную полость, причем последняя соединена с командной полостью большего поперечного сечения каналами, а также через расточки и сверления в золотнике, при этом пилотный золотник с корпусом образ/ет двухходовой пилотный распределитель, один вход которого соединен через каналы в корпусе с командной полостью мень3958ше,го поперечного сечения и через гидроклапаны ИЛИ с нагнетающей магистралью насоса, другой вход соединен со сливом в бак; а два выхода - суправляющими камерами распределителя, причем в канале, соединяющим дренажную и командную полости большего поперечного сечения, установлен регулируемый дроссель. На чертеже показана принципиальная схема гидравлической судовой рулевой машины и устройство управления. Рулевая машина содержит исполнительный механизм 1, включающий в себя цилиндры 2 и 3 подвижный плунжер k, взаимодействующий через шарнирную передачу с румпелем и неподвижные плун жеры 5 и 6, закрепленные в цилиндрах и установленные в расточках подвижного плунжера. Цилиндры, подвижный и неподвижный плунжеры образуют четь1ре рабочие каме ры А, Б, В, Г. Рабочие камеры В и Г через магистрали 7 и 8, а камеры А и Б через магистрали 9 и 10 и распределитель 11 соединены с насосом 12. Устройство управления распределителем 11 выполнено в виде порогового гидроманипулятора состоящего из порш ня 13 малого диаметра и пилотного золотника V большего диаметра, подпружиненные пружиной 15 усилие поджатия которой регулируется винтом 16. Поршень 13 и золотник 14 образуют в корпусе 17 гидроманипулятора две командные полости меньшего 18 и большего 19 поперечного сечения, соединенные между собой через канал 20 в корпусе, и дренажную полость 21 большего попереч ного сечения, соединенную с командной полостью 19 через канал 22 в золотнике и канал 23 в корпусе. Пороговый гидроманипулятор снабжен регулируемым дросселем 24, установленным в канале 23. Пилотный золотник 14 с корпусом 17 образуют двухходовой распределител вход 25 которого, соединен через каналы 26 и 20 с командной полостью 18 меньшего поперечного сечения и через клапаны ИЛИ 27 - с нагнетающей магистралью насоса 12, другой вход 28 соединены с дренажной полостью 21 и со сливом 29 в бак 30 а два выхода 31 и 32 - с управляющими камерами распределителя Т1. Работа рулевой машины при переклад Кб из нулевого в крайнее правое положение и обратно происходит в следующе последовательности. При задании угла перекладки рабочая жидкость от насоса 12 через магистраль 7 поступает в рабочую камеру В, заставляя подвижный плунжер перемещаться вправо. Одновременно рабочая жидкость поступает через клапан ИЛИ в командную полость 18, через вход 25 и каналы 20 и 26 и в левую Управляющую камеру распределителя 11 , золотник которого находится в положении, при котором рабочая жидкость из камеры Б перепускается в камеру А. Правая управляющая камера распределителя 11 через выход 32 и вход 28 соединена со сливом в 6ak. На Первой ступени регулирования рабочий объем исполнительного механиз-ма имеет минимальное значение, и руль перекла/ ывается с максимальной скоростью. При увеличении давления поршень 13, а вместе с ним и золотник 14 перемещаются вправо, преодолевая усилие пружины 15, а рабочая жидкость из дре полости 21 по каналам 22 и 23 через дроссель 24 перепускается в командную полость 19 равного ей сечения.; Скорость срабатывания пороговогогидроманипулятора и исключение его ложных срабатываний при случайном резком возрастании или уменьшении нагрузки на руле достигается установкой определенного проходного сечения дросселя 24, При достижении максимального порогового уровня давления срабатывания .,( золотник 14 гидройанипулятора перекраивает канал 23, соединяющий командную и дренажную полости 19 и 21 соответственно. В то же время командная полость 19 соединяется через вход 25, канал 26 и клапаны ИЛИ 27 с нагнетающей магистралью насоса 12, резко увеличивается усилие. действующее на золотник 14. Вследствие этого золотник 14 переключается в правое положение, при котором нагнетающая магистраль насоса через клапаны ИЛИ 27 и вход 25, канал 26 и выход 32 соединяется с правой управляющей камерой распределителя 11, левая управляющая камера которого через выход 31 и вход 28 соединяется со сливом в, бак. . Золотник распределителя П переключается в положение, при котором камеры А и В исполнительного механизма 1 соединяются с нагнетающей магистралью насоса 12, а .камеры Б и Г со сливной магистралью. Происходит увели чение рабочего объема исполнительного механизма 1 и уменьшение скорости перекладки руля при обеспечении на максимальных углах перекладки номинальных нагрузочных характеристик. В момент переключения ступеней ретулирования рабочего объема исполнительного механизма происходит уменьшёние давления в нагнетающей магистрали насоса и командных полостях 18 и .19 гидроманипулятора, обратное срабатывание которого исключается за счет соответствующего выбора отношения площадей и установки дросселя 2k. При перекладке руля из крайнего правого положения в нулевое работа рулевой машины происходит в обратной последовательности. При достижении минимального порого вого уровня давления срабатывания (Р) происходит обратное переключение золотника гидроманипулятора, и нагнетающая /магистраль насоса через вход 25, канал 26 и выход 31 соединяется с левой управляющей камерой распределителя 11, правая управляющая камера которого подключается через вы .ход 32 и вход 28 на слив в бак. Золотник распределителя 11 переключается в первоначальное положение, камеры Д и Б соединяются друг с другом, и рабочий объем исполнительного механиз ма принимает минимальное значение. . Работа рулевой машины при переклад ке руля из нулевого в крайнее левое Положение и обратно осуществляется аналогично. Технико-экономический эффект рулевой машины заключается в повышении надежности и эффективности работы. Повышение надежности работы на 10151 достигается вследствие установки регулируемого дросселя в канале, соединяющем дренажную и командную полос ти гидроманипулятора, что исключает ложные срабатывания устройства управления при больших скоростях переклад ки руля и резком увеличении или умень шении давления в нагнетающей магистрали насоса. Повышение эффективности рулевой машины в части уменьшения на 20-25% времени перекладки руля достигается за счет оптимального использования исполнительного механизма- в насосном режиме его работы при перекладке руля с левого (правого) борта в среднее положение и обусловлено уменьшением времени срабатывания распределителя, имеющего гидравлическое управление от пилотного распределителя порогового гидроманипулятора. Формула изобретения Гидравлическая судовая рулевая машина , содержащая многокамерный исполнительный механизм, кинематически связанный с румпелем и гидравлически посредством нагнетательной и сливной магистралей соединенный с насосом, гидроклапанами ИЛИ, и распределителем, -имеющим управляющие камеры, каналы в корпусе и снабженным гидравлическим устройством управления, и бак со сливом, отличающаяся тем, что, с целью повышения надежности и эффективности работы рулевой машины, гидравлическое устройство управления выполнено в виде порогового гидроманипулятора, состоящего из поршня и подпружиненного пилотного золотника большего, чем поршень диаметра образующих в корпусе гидроманипулятора две командные полости меньшего и большего поперечного сечения, которые, сообщены между собой через каналы в корпусе и дренажную полость, причем последняя сое/91Иена с командной полостью большего поперечного сечения кач налами, а такжерасточками и сверлениями в золотнике, при этом пилотным золотником и корпусом гидроманипулятора образован двухходовой пилотный распределитель, один вход которого соединен через каналы в корпусе с командной Полостью меньшего поперечного сечения и через гидррклапаны ИЛИ с нагнетающей магистралью насоса, другой вход сообщен со сливом в бак, а два выхода - с управляющими камерами распределителя, причем в канале, соеиняющем дрейажную и командную поость большего поперечного сечения, становлен регулируемый дроссель. Источники информации, ринятые во внимание при экспертизе 1. Авторское свидетельство СССР 713770, кя, В 63 Н 25/30, 1978. K(l ftlff:i(ff/: т- I энй 7//7/ y//M7/ /// Z /7 :7////// //////Лit V VWkVWsV i W a /Л Тч us и 2Sj( Г 5 J I /y7///y////7jr / W/. .чччулГг гу р V7/ ffJ JJfffffrjfA rJ 1 IS S
