Изобретение относится к средствам измерения частоты вращения и может быть использовано для формирования командных сигналов при достижении частотой вращения вала агрегата заранее выбранных значений, преимущественно для защиты гидротурбины.
Известны.способы формирования сигналов по частоте вращения вала агрегата путем преобразования частоты вращения в пропорциональную ей частоту следования импульсных сигналов и контрольных сигналов и периодического суммирования тех и других сигналов 1 J.
Однако способы не обеспечивают достаточной помехоустойчивости и Нсщежности формирования сигнала,.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ формирования сигнала по частоте вращения в пропорциональную ей частоту следования импульсных сигналов, периодического суммирования этих сигналов в течение интервала интегрирования, формирования командного сигнала при совпадении результата суммирования импульсных сигналов со значением уставки , сброса результата
этого суммирования по окончании интервала интегрирования и периодического суммирования контрольных сигналов в течение контрольного интервала 2.
Недостатком способа следует считать его. несколько пониженную надежность и помехоустойчивость.
Цель изобретения - повышение на10дежности и помехоустойчивости.
Для достижения поставленной цели в качестве контрольных сигналов выбирают импульсные сигналы, контрольный .интервал выбирают меньшим, чем
15 интервал интегрирования, и дополнительно формируют сигнал на сброс результата суммирования импульсных сигналов при превышении заданного значения результатом суммирования
20 контрольных сигналов.
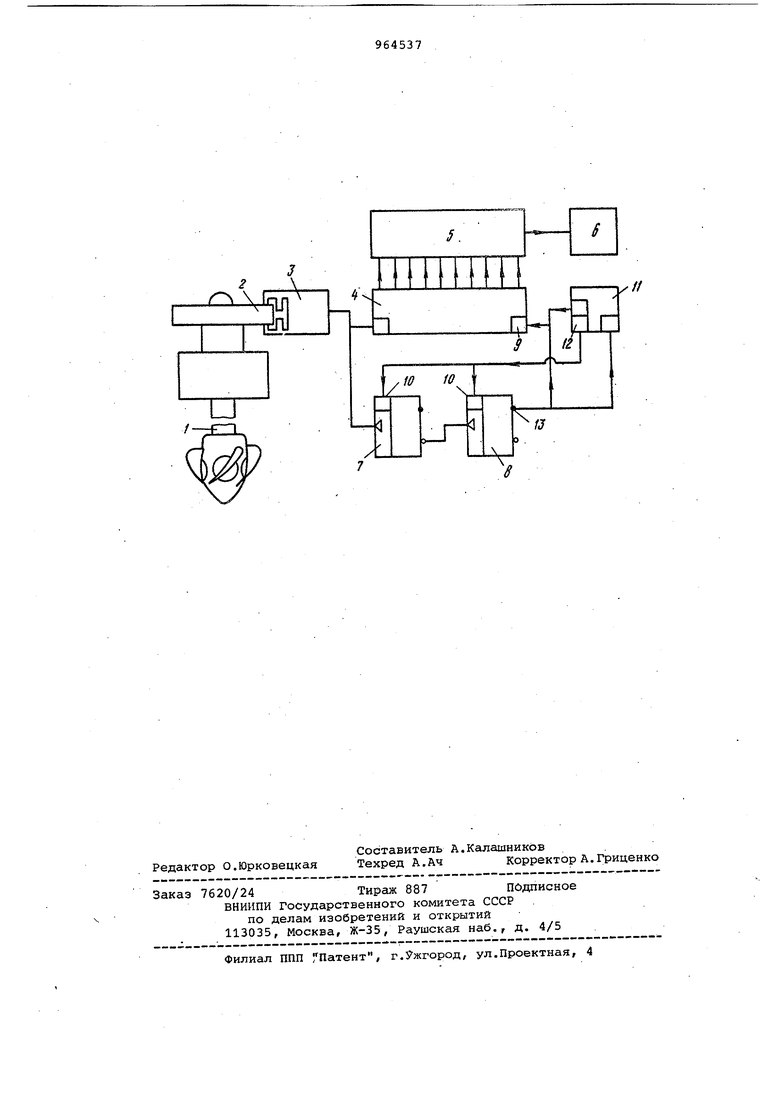
На чертеже приведена схема реализации способа.
Вал 1 агрегата, например гидротурбины, снабжен емкбстным датчи25ком 2, конструктивно совмещенным с преобразователем -3, преобразующим частоту изменения емкости датчика 2, пропорциональную частоте вращения вала 1, в частоту следования элект30рических импульсных сигналов. Выход
преобразователя 3 связан с входом сумматора 4, подключенного через кодовые выходы к декодирующему блоку 5, управляющему командным блоком 6. Одновременно выход преобразователя 3 подключен к вспомогательному регистру, выполненному на счетных триггерах 7 и 8, при этом как сумматор 4, так и эти триггеры соединены своими установочными входами 9 и 10 соответственно к выходам таймера 11, который генерирует две последовательности периодических сигналов с различными периодами следования импульсов каждая.
Способ осуществляется следующим образом.
При достижении частотой вращения вала 1 значения уставки на кодовых выходах сумматора 4 установится кодовая комбинация, соответствующая этой частоте, которая поступает в декодирующий блок 5 (в качестве этого блока обычно используется набор коньюкторов, входы которых подключают к соответствующим кодовым выходам сумматора 4, а выход - к реле, входящим в командный блок б). Одновременно сигнал с выхода преобразователя 3 поступает и на вход вспомогательного регистра на счетных триггерах 7 и 8. Поскольку период следования импульсов управления с выхода 12 таймера 11 меньше, чем время между рабочими импульсными сигналами, поступающими с преобразователя 3 то при отсутствии сигнала помех триг гер 8 сохраняет своесостояние и не изменяет режима работы как сумматора 4, так и таймера 11. Если же на входе сумматора 4 наряду с рабочими сигналами поступит сигнал помехи, то выход 13 триггера 8 изменит свое состояние, в результате чего, посколку этот выход связан с входами сумматора 4 и таймера 11, эти узлы пере дут в исходное состояние - происходи сброс результата 1 суммирования. Это делает невозможной выработку ложной команды. После сброса результата процесс обработки, поступающей с преобразователя 3 информации начинают сначала.
В качестве таймера удобно использовать сумматор,, аналогичный сумматору 4, управляемый тгшонным генератором, что позволит старший разряд использовать для установки в исходное состояние основного сумматора 4 , а один из младших разрядов для установки в состояние срабатывания триггеров 7 и 8. При таком схемном решечии таймера 11 представляется возможность выбирать период управляющих импульсов в соответствии с режимом работы агрегата.
Способ обеспечивает преимущество в управлении режимом работы агрегата, например гидротурбины, так как позволяет исключить выработку ложных команд при воздействии помех, предотвращая тем самым тяжелые последствия из-за нарушения технологического цикла агрегата.
Формула изобречения
Способ формирования сигнала по частоте вращения вала агрегата, преимущественно гидротурбины, путем пре образования частоты вращения в пропорциональную ей частоту следования импульсных сигналов, периодического суммирования этих сигналов в течение интервала интегрирования, формирования командного сигнала при совпадении рехультата суммирования импульсных сигналов со значением уставки,сброса результата этого суммирования по окончании интервала интегрирования и периодического суммирования контрольных сигналов в течение контрольного интервала, о т л и ч а ющ и и с я тем, что, с целью повышения надежности и помехоустойчивости, в качестве контрольных сигналов выбирают импульсные сигналы, контрольный интервал выбирают меньшим, чем интервал интегрирования, и дополнительно формируют сигнал на сброс результата суммирования импульсных сигналов при превышении заданного значения результатом суммирования контрольных сигналов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 563634, кл. G 01 Р 3/481, 1975.
2.Авторское свидетельство .СССР № 678416, кл. G 01 Р 3/48, 1977.