(50 ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический следящий привод | 1985 |
|
SU1249207A1 |
| Четырехлинейный гидрораспределитель с плоским поворотным золотником | 2002 |
|
RU2219353C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU903585A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И ЦЕНТРАЛЬНЫМ ПРИВОДОМ МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА С РЕАЛИЗАЦИЕЙ ФУНКЦИИ АКТИВНОГО ДЕМПФИРОВАНИЯ | 2008 |
|
RU2374506C1 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| Пневмогидравлический следящий привод | 1989 |
|
SU1642098A1 |
| Пневматический следящий привод | 1983 |
|
SU1137257A1 |
| Шаговый электрогидравлический привод | 1974 |
|
SU545777A1 |
. 1.. . . ; Изобретение относится к пневмо1автоматйке и может быть использовано в позиционных системах управления различного технологического оборудования ,
Известен пневматический следящий привод, содержащий исполнительный цилиндр, размещенный в нем поршень с образованием рабочих полостей, дросселирующий распределитель, включающий корпус с выполненными в нем okiHaми,сосэбщенными с рабочими полостя-г ми, источником питания и атмосферой, и связанный с поршнем через измерительный преобразователь Cl .
Известный пневматический следящий привод характеризуется низкой скоростью позиционирования (порядка 0,050,1 м/с), что вполне приемлемо при небольших величинах входного воздействия , имеющих Mecto в системах регулирования. При использовании следящих пневмоприводов для управления положением подви хного объекта в позиционных
системах управления различного техно-, ло.гического оборудования требования к скорости позиционирования возрастают, а повышение скорости позицконирования путем увеличения пропускной способности самого следящего золотника в данном случае неприемлемо, так как при этом появляются автоколебания дящего золотника и теряется устойчивость привода.
10
Цель изобретения - повышение быст-. родействия привода.
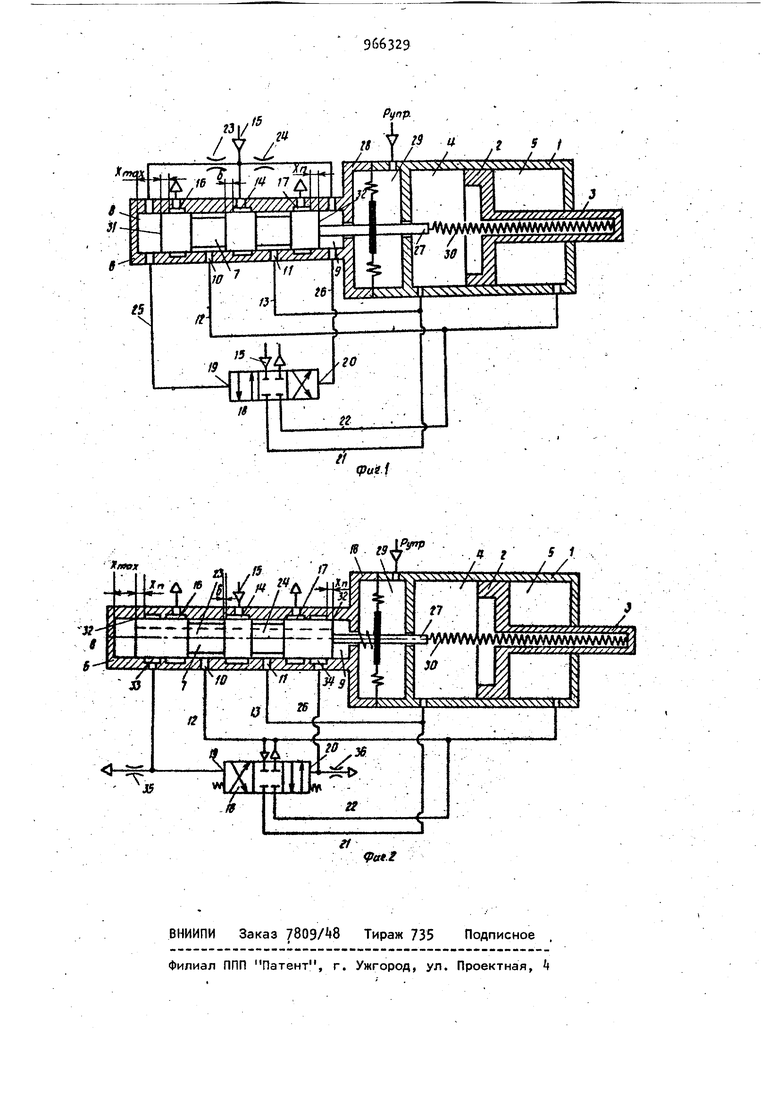
Поставленная цель достигается тем, что привод снабнен трехпозиционным распределителем с управляющими полос15тями, подключенным параллельно дросселирующему распределителю к рабочим полостям, а дросселирующий распределитель выполнен в виде следящего золотника, установленного в корпусе с
20 образованием торцовых камер, связанных через дроссели с источником питания и управляющими полост)1ми трехпозиционного распределителя, причем торновые камеры отсечены кромками следящего золотника от близлежащих окон, сообщенных с атмосферой перекрытием, величина которого определяется из сле дующегр выражения: Xf ,,, где сА - величина перекрытия окон корпуса следящим золотником дросселирующего распределите ля; Хр - величина перекрытия окон, сообщенных с атмосферой кромками золотника от торцовых камер; Х - максимальный рабочий ход следящего золотника. Кроме того, корпус дросселирующего распределителя снабжен дополнительными окнами, сообщенными с управляющими полостями трехпозиционного распре utjf пглплг-т-аим Tr ovnrtObinwr tJur r-r делителя, а через дроссели - с атмос ферой, причем торцовые камеры отсечены кромками следящего золотника от близлежащих дополнительных окон на величину Xf. На фиг, 1 и 2 представлены принципиальные схемы предлагаемого устройства. Пневматический следящий привод (фиг. 1 и 2 ) содержит исполнительный цилиндр 1, размещенный в нем поршень 2 со штоком 3 с образованием рабочих полостей j и 5, дросселирующий распределитель, выполненный в виде ус тановленного в корпусе 6 следящего золотника 7 с образованием торцовых камер 8 и 9. В корпусе 6 выполнены ок на 10 и 11, связанные линиями 12 и 13 е соответствующими рабочими полостями k и 5, окно 1t, связанное с источникой 15 питания, и окна 1б и 17, сообщенные с атмосферой. Кроме того, пр вод снабжен трехпозиционным распределителем 18 с управляющими.полостями 1 и 20, подключенным параллельно дросселирующему распределителю линиями 21 и 22 к рабочим полостям и 5. Торцовые камеры 8 и 9 связаны .через дрос- сели 23 и 2 с источником 15 питания, а линиями 25 и 26 - с соответствующими управляющими полостями 19 и 2 распределителя 18. Следящий золотник жестко связан с штоком 27 измерительного преобразователя 28, с камерой 29 управления, а через пружину 30 с поршнем 2. Торцовые камеры 8 и свлирующего распределителя отсечены в исходном положении кромками 31 и 32 следящего золотника 7 от близлежащих окон 16 и 17 перекрытием, величина которого определяется из следующего соотношения: d X п Х„с(кс, где с/- - величина перекрытия окон 1, 16 и 17 корпуса 6 дросселирую щего распределителя; Х| величина перекрытия окон 16 и 17 кромками 31 И 32 золотника 7 от торцовых камер 8 и 9; макс/ максимальный рабочий ход сле Е1ящего золотника 7. На фиг. 2 представлен вариант привода, в котором в корпусе 6 дросселирующего распределителя выполнены дополнительные окна 33 и 3, сообщенные 25 и 26 с соответствующими - -1 лостями 19ии 20 и через дроссели 35 i 36 - с атмосферой, причем торцовые камеры 8 и 9 отсечены в исходном положении кромками 31 и 32 следящего золотника 7 от близлежащих дополнительных окон 33 и З на величину Х. Устройство работает следующим образом. Если командный сигнал R,f, (фиг. 1) имеет постоянное значение, измерительный преобразователь 28 находится в равновесии под действием давления воздуха в камере 29 управления и усилия пружины 30 обратной связи. Следящий золотник 7 перекрывает окна 10 и 11, а торцовые камеры 8 и 9 перекрыты его кромками 31 и 32. От окон 16 и 17 в обе полости 19 и 20 трехпозиционного распределителя 18 поступают равные по величине сигналы, и он находится в средней позиции, при которой перекрыты линии 21 и 22. При изменении командного сигнала Р,рр,например, при увеличении при ходё равновесие измерительного преобразователя нарушается, и его жесткий центр вместе со следящим зопотником 7 смещается влево, Если величина смещения следящего золотника 7 „е превышает Хр, то привод работает в обычном режиме, т.е. воздух от источника 15 питания через следящий золотник 7 и линию 13 проходит в рабочую полость kf а из рабочей полости 5 вaт юcфepy. Шток 3 перемещается впра-во, растягивая пружину 30, которая при этом стремится уравновесить преобразователь 28. 59 При величине смещения следящего золотника,7, превышающей Хр, торцовая камера 9 сообщается с окном 17 связанным с атмосферой. При этом давление в управляющей полости 20 уменьшается, и распределитель 18 переключается, соединяя линию 21 с источником 15 питания. За счет дополнительного потока сжатого воздуха происходит быстрое перемещение штока 3. Пружина 30 обратной связи, растягиваясь, стремится вернуть в исходное положение следящий золотник 7. Перемещаясь вправо, золотник 7 своей торцовой кромкой 32 отсекает торцовую камеру 9 от атмосферы, давление о последней возрастает и выравнивается с давлением в торцовой камере 8, в р зультате чего распределитель 18 устанавливается в нейтральное положение, в котором линии 21 и. 22 перекрыты. Дальнейшее перемещение штока 3 происходит под действием потока воздуха, поступающего только от следящего золотника 7. Таким образом, подход к заданной позиции осуществляется в слежения, Аналогично работает следящий привод Гфиг. 2). При смещении следящего золотника 7 на величину, большую Хр,, наприме вправо, дополнительное окно 33 сообщается с торцовой камерой 8. Давление из торцовой камеры 8 поступает в полость 19 управления распределителя 18 перемещая его. WTOK 3 исполнительного цилиндра 1 под действием потока воздуха, поступающего от следящего золот ника 7 и распределителя 18, перемещ ется влево. Как только следящий золотник 7 переместится влево и перекроет своей кромкой 31 дополнительное , воздух из управляющей полости 19 дроссель 35 сбрасывается в атмосферу, и распределитель 18 пере крывает линии 21 и 22. Приводмпереходит в режим слежения. Таким образом, повышается скорость позиционирования при больших перемеще ниях, и за счет этого производительность автоматизируемого оборудования увеличивается. 9 Формула изобретения 1. Пневматический следящий привод, содержащий исполнительный цилиндр, размещенный в нем поршень с образованием рабочих полостей, дросселирующий распределитель, включащий корпус с выполненными в нем окнами,сообщенными с раббчими полостякм, источником питания и атмосферой и связанный с поршнем через измерительный преобразователь, отличающийся тем, что, с целью повышения быстродействия, привод снабжен трехпозиционным распределителем с управляющими полостями, подключенным, параллельно дросселирующей; распределителю к рабочим полостям, а дросселирующий распределитель выполнен в виде следящего золотника, уста- ; новленного в корпусе с образованием торцовых камер, связанных через дроссели с источником питания и управляющими полостями трехпозиционного распределителя, причем торцовые камеры отсечены кромками следящего золотника от близлежащих окон, сообщенных с атмосферой перекрытием, величина котор ого определяется из следующего выражениягде сА - величина перекрытия окон корпуса следящим золотником .дросселирующего распределителя; величина перекрытия окон, сообщенных с атмосферой кромг ками золотника, от торцовых камеру -. . - максимальный рабочий ход следящего золотника. 2„ Привод по п. 1, о т л и ч а ющ и и с я тем, что, корпус дросселирующего pacпpeдeлиteля снабжен дополнительными окнами, сообщенными с управляющими полостями трехпозиционного распределителя, .а через дроссели с атмосферой, причем торцовые камеры отсечены кромками следящего золотника от близлежащих дополнительных кон на величину Х. Источники информации, принятые во внимание при экспертизе 1. Авторское i свидетельство СССР ff 61103, кл. F 15 В 9/06, 1976v,.. NzJkA/vl ЯаМ . « I- S 1 Т ./../ / / хх ууч дУуух XX ЧА Х Х -fffjefiffff/frf шпшшш шА
