12
Изобретение относится к ггневмоав- томатике и может быть использовано в пневмосистэь5ах проммтпекньгх роботов и манипуляторов.
Целью изобретения вляется повыше-- ние быстродействия и надежкости
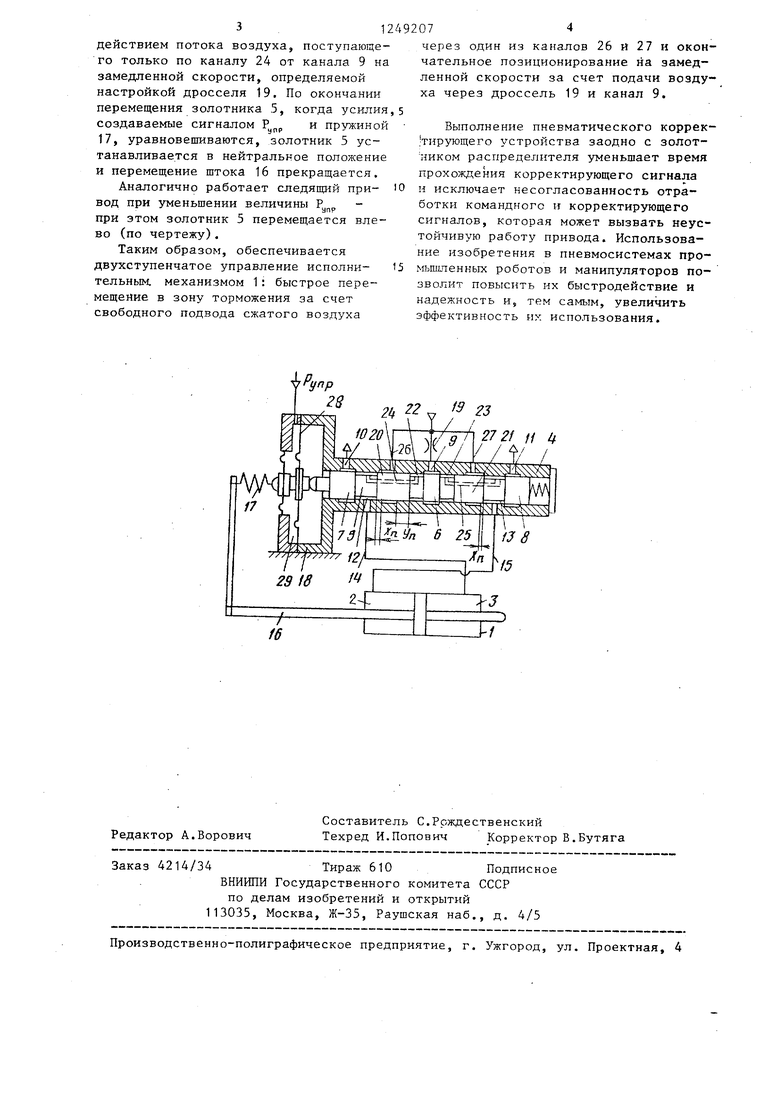
На чертеже изображена схема пневматического следящего привода.
Привод содержит исполнительный мо- ханизм 1 с рабочими камерами 2 и 3 и золотниковый распределитель 4 с зо
лотником 5э имеющим центральный пок- сок 6 и крайние пояски 7 и 8, взаимодействующие с нормально закрытыми ка- каналом 9 питания и каналами 10 и И 5S сброса, соответственно и образующие рабочие полости 12 и 13; соединенные выходными каналами 14 и 15 с камерами 2 и 3, Шток б механизма 1 соединен устройством обратной связи, выполнен 20 ным, например, в виде пр ткиньг 17, со сравнивающим усилителем ISj подключенным к задатчику и связанным с золотником 5. При этом на входе канала
Входной командный сигнал Ру
задатчика подается в управляющую полость 29 усилителя 18. Если командный сигнал имеет постоянное значение, мембрана 28 находится в равновесии под действием давления Р,,,,р и усилия пружины 17 обратной связи. Золотник 5 перекрывает каналы 9, 10, 11, 26 и 27. Шток 16 исполнительного механизма 1 неподвижен.
При изменении значения командного
сигнала Р„
например при его увеличении, равновесие мембраны 28 наруша- 9 установлен регулируемый дроссель 19,25 ется и ее жесткий центр вместе с зоа пневматическое устройство коррекции скорости штока 16 выполнено в виде дополнительных поясков 20 и 21, из которых поясок 20 размещен мелуду по- ясками 6 и 7с образованием дополнительной полости 22, а поясок 21 раз-- мещен между поясками 6 )i 8 с образованием дополнительной полости 23 осевых каналов 24 и 25,. выполненных в золотнике 5-., и дополнительных каналов 26 и 27 питания5 причем канал 24 соединяет полости 12 и 22;, канал 24 полости 13 и 23, а каналы 26 и 27 взаимодействуют с пояска1 {и 20 и 21, выполненш гми с двухсторонним положительным перекрытием Усилитель 18 имеет мембран, 28 и управляющую полость 29, которая подключена к задатчику, выполненному в виде источника пневматического сигнала Р,,пр .
Каналы 9, 26 и 27 соединены с источником сжатого воздуха (не показа) Величина положительного перекрытия .поясков 20 и 21 со стороны полостей 12 и 13 соответственно выбирается из соотношения
лотником 5 смещается вправо (по чертежу) . Если величина смещения золотника 5 не превышает величины перекры- :тия х, пояска 20, сжатый воздух по30 ступает через дроссель 19, дросселирующую кромку пояска 6, дополнительную полость 22 и канал 24 золотника 5 в рабочую полость 12, соединенную с рабочей камерой 3 исполнительного ме3 ханизма 1. При этом из рабочей камеры 2 исполнительного механизма 1 воздух выходит в атмосферу через рабочую полость 13 распределителя 4 и канал 11 . Шток 16 исполнительного механизма
40 1 перемещается влево с замедленной скоростью, определяемой настройкой дросселя 19, растягивая пружину 17 до уравновешивания усилия мембраны 28.
45
При подаче командного сигнала Р
на
где X,, STk величина
вызывающего смещение золотника 5 величину, превышающую значение х„, рабочая камера 12 распределителя 4 .через .дополнительный канал 26 соединяется непосредственно с источником 50 сжатого воздуха. При зтом обеспечивается быстрое перемещение штока 16 исполнительного механизма. Пружина 17 обратной связи, растягиваясь, стремится вернуть в исходное положение золот- положительного пе-- 55 ник 5. Перемещаясь влево, золотник 5
перекрывает дополнительный канал 26, т„ е. при подходе к заданной позиции перемещение штока 16 происходит под
ST рекрытия;
величина тормозного пути исполнительного механизма;
х.
k - суммарный коэффициент усиления обратной связи по перемещению штока 16 исполнительного механизма 1.
Величина положительного перекрытия х, поясков 20 и 21 со стороны дополнительных полостей 22 и 23 выполняется не менее величины рабочего хода золотника 5.
Пневматический следящий привод работает следующим образом.
Входной командный сигнал Ру
задатчика подается в управляющую полость 29 усилителя 18. Если командный сигнал имеет постоянное значение, мембрана 28 находится в равновесии под действием давления Р,,,,р и усилия пружины 17 обратной связи. Золотник 5 перекрывает каналы 9, 10, 11, 26 и 27. Шток 16 исполнительного механизма 1 неподвижен.
При изменении значения командного
сигнала Р„
например при его увелилотником 5 смещается вправо (по чертежу) . Если величина смещения золотника 5 не превышает величины перекры- :тия х, пояска 20, сжатый воздух поступает через дроссель 19, дросселирующую кромку пояска 6, дополнительную полость 22 и канал 24 золотника 5 в рабочую полость 12, соединенную с рабочей камерой 3 исполнительного механизма 1. При этом из рабочей камеры 2 исполнительного механизма 1 воздух выходит в атмосферу через рабочую полость 13 распределителя 4 и канал 11 . Шток 16 исполнительного механизма
1 перемещается влево с замедленной скоростью, определяемой настройкой дросселя 19, растягивая пружину 17 до уравновешивания усилия мембраны 28.
45
При подаче командного сигнала Р
на
вызывающего смещение золотника 5 величину, превышающую значение х„, рабочая камера 12 распределителя 4 .через .дополнительный канал 26 соединяется непосредственно с источником 50 сжатого воздуха. При зтом обеспечивается быстрое перемещение штока 16 исполнительного механизма. Пружина 17 обратной связи, растягиваясь, стремит ся вернуть в исходное положение золот 55 ник 5. Перемещаясь влево, золотник 5
перекрывает дополнительный канал 26, т„ е. при подходе к заданной позиции перемещение штока 16 происходит под
действием потока воздуха, поступающего только по каналу 24 от канала 9 на замедленной скорости, определяемой настройкой дросселя 19. По окончании перемещения золотника 5, когда усилия создаваемые сигналом и пружиной 17, уравновешиваются, золотник 5 устанавливается в нейтральное положение и перемещение штока 16 прекращается.
Аналогично работает следящий привод при уменьшении величины Р,, при этом золотник 5 перемещается влево (по чертежу),
Таким образом, обеспечивается двухступенчатое управление исполнительным, механизмом 1: быстрое перемещение в зону торможения за счет свободного подвода сжатого воздуха
9207
5
через один из каналов 26 И 27 и окончательное позиционирование на замедленной скорости за счет подачи воздуха через дроссель 19 и канал 9.
Выполнение пневматического коррек- тирующего устройства заодно с золот- 71ИКОМ распределителя уменьшает время прохождения корректирующего сигнала и исключает несогласованность отработки командного и корректирующего сигналов, которая может вызвать неустойчивую работу привода. Использование изобретения в пневмосистемах про- 15 .NammeHHbix роботов и манипуляторов позволит повысить их быстродействие и надежность и, тем самым, увеличить эффективность их использования.
10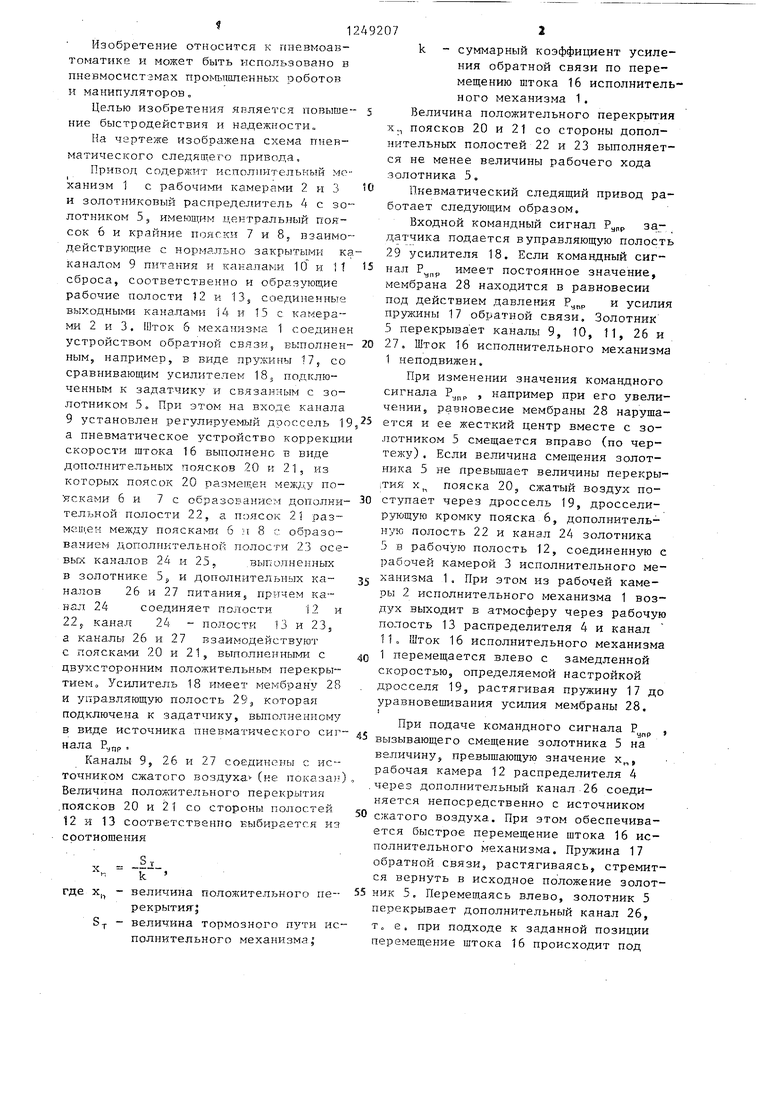
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1973 |
|
SU398763A1 |
| Пневматический следящий привод | 1981 |
|
SU966329A1 |
| Пневматический следящий привод | 1983 |
|
SU1137257A1 |
| ВЕТРОАГРЕГАТ | 1993 |
|
RU2065993C1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Гидравлический привод | 1989 |
|
SU1672010A1 |
| Устройство для перемещения и установки рабочего органа машины в заданном положении | 1973 |
|
SU506316A3 |
| Устройство дистанционного переключения передач транспортного средства | 1989 |
|
SU1699825A1 |
| Гидравлический привод | 1988 |
|
SU1606748A1 |
| Криорефрижератор с пневмоприводом | 1976 |
|
SU612129A1 |
W 23
272/ // 4
Редактор А.Ворович
Составитель С.Рождественский
Техред И.Поповнч Корректор В.Бутяга
Заказ 4214/34Тираж 610Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
| Патент Великобритании № 1311524, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 0 |
|
SU398763A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
