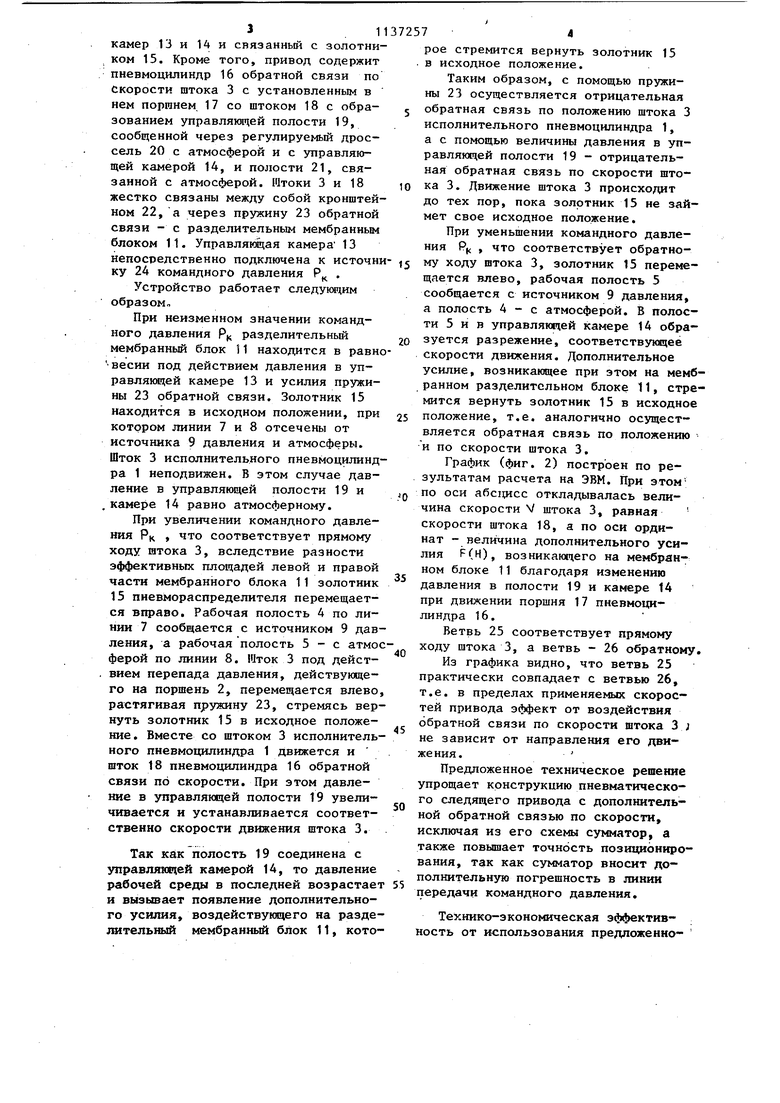
f Изобретение относится к cpeдcтвa гидропневмоавтоматики и может быть использовано в различных отраслях народного хозяйства для автоматизации производственных процессов, в частности в промышленных роботах и станках с числовым программным управлением. Известен электрогидравлический следящий привод, содержащий исполни тельный гидроцилиндр, дросселирующий гидрораспределитель, включен- . шяй в диагональ гидравлического моста, образованного двумя постоянными дросселями и двумя регулируемыми дросселями, входящими в состав гидроусилителя, гидроцилиндр обратной связи по скорости выходного звена, полости которого подключены к диагонали гидравлического моста ij. Недостатком известного привода является сложность конструкдаи (про точной части конструкции). Известен пневматический следящий привод, содержащий исполнительный пневмоцилиндр, поршень и шток, уста новленные в пневмоцилиндре с образованием рабочих полостей, пневмораспределитель золотникЪвого 5;типа, подключенный к линиям связи рабочих полостей пневмоцилиндра с источником давления и атмосферой и вьтолненный с управлением от мембранного привода, имеющего разделительный мембранный блок, размещенный в корпусе с образованием двзгх управляющих камер и связанный с золотником и через пружину обратной связи со штоком исполнительного пневмоци1шндра, и пневмоцилиндр обратной связи по скорости штока исполнитель ного пневмоцилиндра, полости которо го связаны через дроссель с атмосфе рой, а шток жестко связан со штоком исполнительного пневмоцилиндра, причем одна из управляющих камер, расположенная между мембранным блоком и корпусом со стороны пружины обратной связи, подключена к источHmty командного давления, и суммато командного давления и сигнала обрат ной связи по скорости . Однако наличие сумматора в схем привода усложняет его конструкцию и снижает точность позиционирования из-за появления дополнительной пог72решности в цепи передачи командного давления. Цель изобретения - упрощение конструкции и повышение точности позиционирования привода. Поставленная цель достигается тем, что в пневматическом следящем приводе, содержащем исполнительный пневмоцилиндр, поршень и шток, установленные в пневмоцилиндре с образованием рабочих полостей, пневмораспределитель золотникового типа, под-ключе нный к линиям связи рабочих полостей пневмоцилиндра с источником давления и атмосферой и вьшолненньш с управлением от мембранного привода, имекщего разделительный мемб- ранный блок, размещенный в корпусе с образованием двух управляющих камер и связанный с золотником и через пружину обратной связи - со штоком исполнительного пневмоцилиндра, и пневмоцилиндр обратной связи по скорости штока исполнительного пневмоцилиндра, полости которого связаны через дроссель с атмосферой, а шток жестко связан со штоком исполнительного пневмоцилиндра, причем одна из управляющих камер, расположенная между мембранным блоком и корпусом со стороны пружины обрати ной связи, подключена к источнику командного давления, пневмоцилиндр обратной связи по скорости выполнен с одной управляющей полостью, связанной с второй управлякяцей камерой мембранного привода,. На фиг. 1 изображена схема предлагаемого привода; на фиг. 2 - графическая зависимость величины давления в полости пневмоцилиндра обратной связи от скорости перемещения штока исполнительного пневмоцилиндра. Пневматический следящий привод Сфиг. 1) содержит исполнительный пневмоцилиндр 1, поршень 2 и шток 3, установленные в пневмоцилиндре 1 с образованием рабочих полостей 4 и 5, пневмораспределитель 6 золотникового типа, подключеншлй к линиям 7 и 8- связи рабочих полостей 4 и 5 пневмоцилиндра с источником 9 давления и атмосферой и выполненный с управлением от мембранного привода 10, имеющего разделительный мембранный блок 11, размещенный в корпусе 12с образованием двух управляющих 31 камер 13 и 14 и связанный с золотником 15. Кроме того, привод содержит пневмоцилиндр 16 обратной связи по скорости штока 3 с установленным в нем поршнем, 17 со штоком 18 с образованием управляющей полости 19, сообщенной через регулируемый дроссель 20 с атмосферой и с управляющей камерой 14, и полости 21, связанной с атмосферой. Штоки 3 и 18 жестко связаны между собой кронштейном 22, а через пружину 23 обратной связи - с разделительным мембранным блоком 11. Управляющая камера 13 непосредственно подключена к источни ку 24 командного давления Р . Устройство работает следующим образомо При неизменном значении командного давления Р, разделительный мембранный блок 11 находится в равн весии под действием давления в управляющей камере 13 и усилия пружины 23 обратной связи. Золотник 15 находится в исходном положении, при котором линии 7 и 8 отсечены от источника 9 давления и атмосферы. Шток 3 исполнительного пневмоцилинд ра 1 неподвижен. В этом случае давление в управляющей полости 19 и , камере 14 равно атмосферному. При увеличении командного давления РК , что соответствует прямому ходу штока 3, вследствие разности эффективных площадей левой и правой части мембранного блока 11 золотник 15 пиевмораспределителя перемещается вправо. Рабочая полость 4 по линии 7 сообщается с источником 9 дав ления, а рабочая полость 5 - с атмо ферой по линии 8. Шток 3 под дейст. вием перепада давления, действующего на поршень 2, перемещается влево растягивая пружину 23, стремясь вер нуть золотник 15 в исходное положение. Вместе со штоком 3 исполнитель ного пневмоцилиндра 1 движется и шток 18 пневмоцилиндра 16 обратной связи по скорости. При этом давление в управляющей полости 19 увеличивается и устанавливается соответственно скорости движения штока 3. Так как полость 19 соединена с управляющей камерой 14, то давление рабочей среды в последней возрастае и вызывает появление дополнительного усилия, воздействунщего на разде лительный мембранный блок 11, кото рое стремится вернуть золотник 15 в исходное положение. Таким образом, с помощью пружины 23 осуществляется отрицательная обратная связь по положению штока 3 исполнительного пневмоцилиндра 1, а с помощью величины давления в управляющей полости 19 - отрицательная обратная связь по скорости штока 3. Движение щтока 3 происходит до тех пор, пока золотник 15 не займет свое исходное положение. При уменьшении командного давления РК , что соответствует обратному ходу штока 3, золотник 15 перемещается влево, рабочая полость 5 сообщается с источником 9 давления, а полость 4 - с атмосферой. В полости 5 и в управляющей камере 14 образуется разрежение, соответствующее скорости движения. Дополнительное усилие, возникающее при этом на мембранном разделительном блоке 11, стремится вернуть золотник 15 в исходное положение, т.е. аналогично осуществляется обратная связь по положению и по скорости штока 3. График (фиг. 2) построен по результатам расчета на ЭВМ. При этом по оси a6cipicc откладывалась величина скорости V штока 3, равная скорости штока 18, а по оси ординат - величина дополнительного усилия Р(Н), возникаю1чего на мембранном блоке 11 благодаря изменению давления в полости 19 и камере 14 при движении поршня 17 пневмоцилиндра 16. Ветвь 25 соответствует прямому ходу штока 3, а ветвь - 26 обратному. Из графика видно, что ветвь 25 практически совпадает с ветвью 26, т.е. в пределах применяемых скоростей привода эффект от воздействия обратной связи по скорости штока 3 ; не зависит от направления его движения. Предложенное техническое решение упрощает конструкцию пневматического следящего привода с дополнительной обратной связью по скорости, исключая из его схемы сумматор, а также повышает точность позиционирования, так как сумматор вносит дополнительную погрешность в линии передачи командного давления. Технико-экономическая эффективность от использования предложенно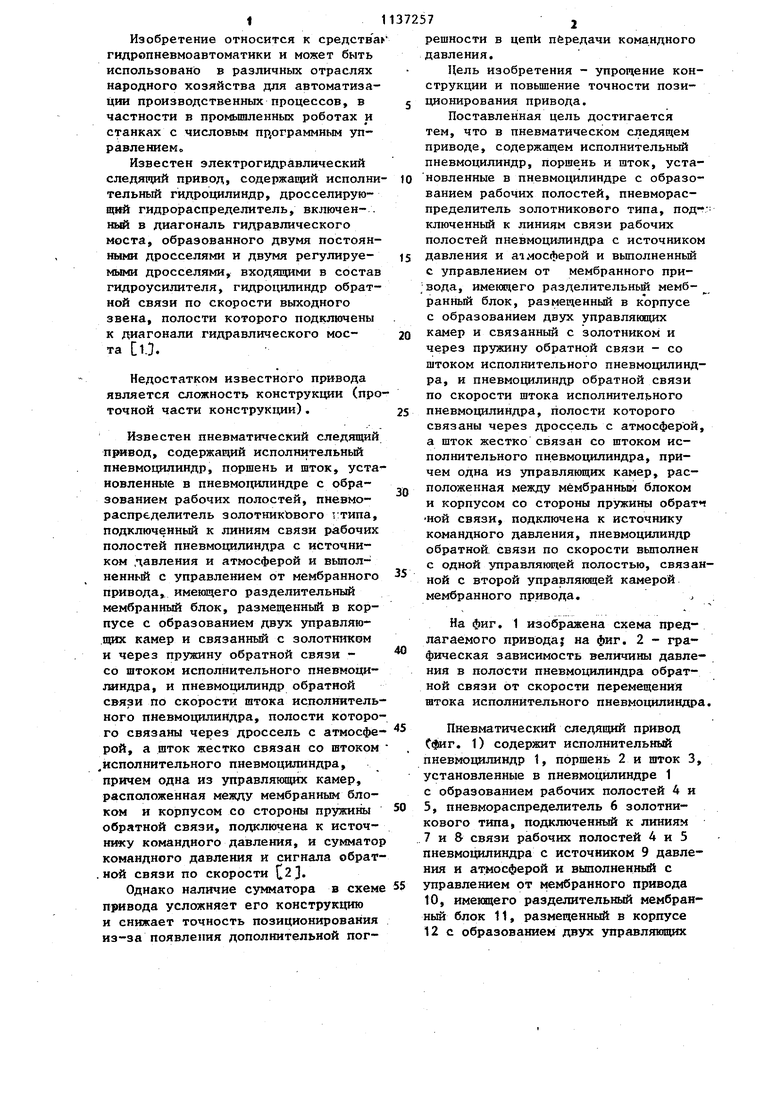
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический следящий привод | 1985 |
|
SU1249207A1 |
| Пневматический следящий привод | 1981 |
|
SU966329A1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1562542A1 |
| ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1973 |
|
SU398763A1 |
| Устройство дистанционного переключения передач транспортного средства | 1989 |
|
SU1699825A1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ С ОДНОСТОРОННИМ УПРАВЛЕНИЕМ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2242575C1 |
| ДИАФРАГМЕННЫЙ ПНЕВМОПРИВОДНОЙ НАСОС | 1994 |
|
RU2067218C1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ КЛАПАННЫЙ ПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2190785C2 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1572990A1 |
ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД, содержащий исполнительный пневмоцилиндр, поршень и шток, установленные в пневмоцилиндре с образованием рабочих полостей, пневмораспределитель золотникового типа, подключенньй к линиям связи рабочих полостей пневмоцилиндра с источником давления и атмосферой и выполненный с управлением от мембранного привода, имеющего разделительный мембранный блок, размещенный в корпусе с образованием двух управляющих камер и связанный с золотником и через гфужину обратной связи - со штоком исполнительного пневмоцилиндра, и пневмоцилиндр обратной связи по скорости штока исполнительного пневмоцилиндра, полости которого связаны через дроссель с атмосферой, а шток жестко связан со штоком исполнительного пневмоцилиндра, причем одна из управляющих камер, расположенная между мембранным блоком и корпусом со стороны пружины обратной связи, подключена к источнику командного давления, отличающийс я тем, что, с целью упрощения конструкции и повьшения точности позиционирования, пневмодилиндр обратной связи по скорости вьнтолнен с одной управляющей полостью, связан- ной с второй управляющей камерой,, мембранного привода. 00 ю сд 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чупраков Ю.И | |||
| Гидропривод и средства гидроавтоматики | |||
| М., Мапиностроение, с | |||
| Устройство для отыскания металлических предметов | 1920 |
|
SU165A1 |
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 0 |
|
SU398763A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
