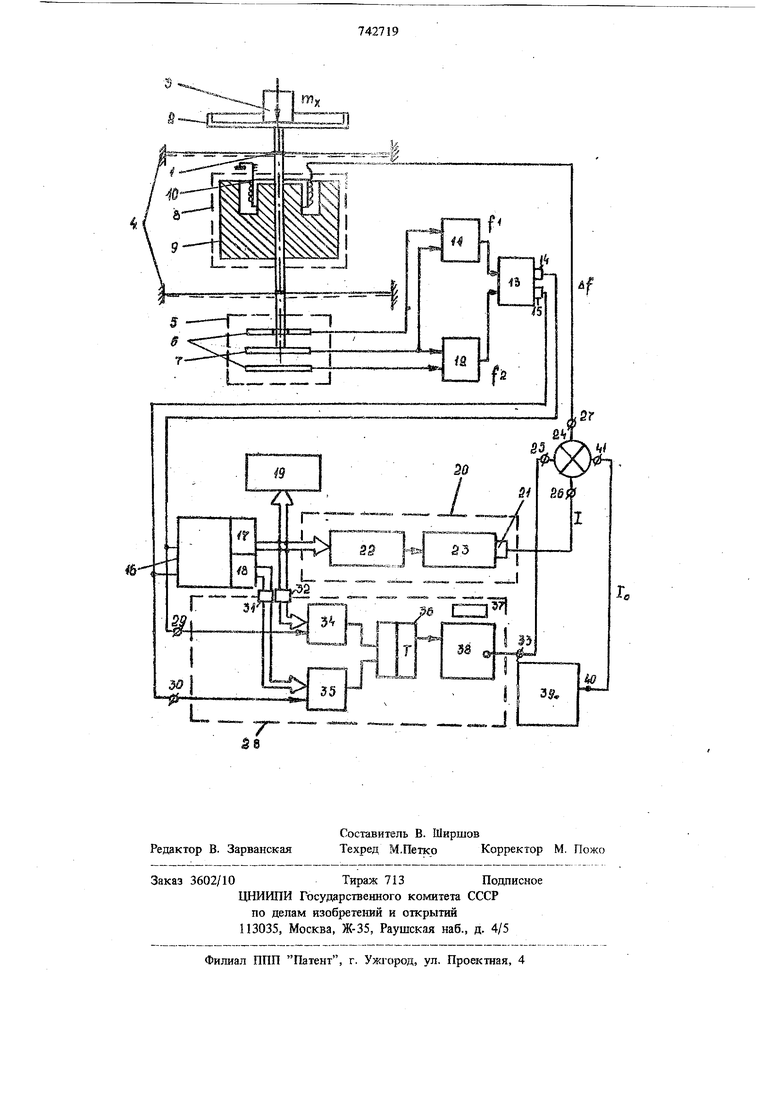
Изобретение относится к области весоизмерительной техники. Извест1 Ы электронные весы с электромагнитным уравновешиванием, содержащие чувствительный элемент в виде коромысла или ква рата, датчик отклонения чувствительного элеме та и систему компенсации 1). Такие весы имеют высокую точность, но большое время измере1шя и сложны в изготов лении и наладке. Известны также цифровые приборы, в которых использована единая астатическая система уравновешивания, исключающая необходимость применения специализированного цифрового прибора на выходе 2. Наиболее близкими к предлагаемым по тех нической сущности являются весы, содержащие закрепленный на подвеске чувствительньп элемент, связанный с преобразователем некомпенсадим, подключенным к у травляемым генераторам, выходы которых подключены к вычитателю частот, подсоединенному к реверсивному, счетчику с прямыми и инверсивными выхо цами, огсчетный прибор, компенсатор и преоб()азователь код-аналог 3. Недостатком известного устройства является неудовлетворительная точность и надежность из-за наличия погрещности от нестабильности компенсатора, а также необходимость использования дополнительных средств для инверсии кода на отсчетном приборе. Цель изобретения - повышение точности и надежности весов. Для этого в весы введены сумматор и логическая цепь в виде двух схем совпадения, триггера, ключа и источника тока, причем вхоцы лопиеской цепи подсоединены к выходам ычитателя частот и к прямым и инверсным выходам реверсивного счетчика, а выход логической цепи соединен с одним из входов сумматора, второй вход которого подключен к ;выходу преобразователя код-аналог. Кроме того, в описываемых весах преобразователь код-аналог выполнен в виде последовательно соединенных преобразователей кода в относительную длительность и 1тервала времели и относительной длительности интервала времени в ток. На чертеже представлена схема цифровых весов. Цифровые весы содержат чувствительный элемент 1 с нагрузочной площадкой 2, на которую устанавдшвают объект 3 с измеряемой массой nrij, закреплениой на поДвеске 4. Преобразователь 5нёкомпенсации содержит неподвижные пластины 6 и подвижную пластину 7, жесжо связанную- с чувствительным элементом 1, а компенсатор 8 содержит неподвижную часть 9, например магнитную систему, и подвижную часть, например катушку 10, закрепленную на чувствительном элементе 1. Кро ме того, весы содержат управляемые генераторы 11 и 12, знакочувствительный вычйтатель 13 , частот с выходами 14 (сложить) и 15 (вы честь), реверсивный счетчик 16 импульсов с прямыми выходами 17 (N) и инверсными выходами 18 (N), отсчетный прибор 19, преобразователь 20 код-аналог с выходом 21, состоящий из последовательно соединенных преобраз вателей 22 и 23 соответственно кода в относительную длительность интервала времени и относительной длительности интервала времени в ток, сумматор 24 с входами 25 и 26 и выходом 27 и логическую цепь 28 с входами 29, 30, 31 и 32 и выходом 33, состоящую из схем 34 и 35 совпадения, триггера 36, отрицательного источника 37 тока и ключа 38, причем входы 29 и 30 соответственно подсоединены к выходам 14 и 15 вычитателя 13 частот, входы 31 и 32 - к выходам 17 и 18 счетчика 16 выход 33 соединен с выходом 25 cj MMaTopa 24 а выход 21 преобразователя 20 код-аиалог с I входом :, 26 сумматора 24. Кроме того, имеется регулируемый источник 39 тока, выход 40 которого соединен со входом 41 сумматора 24. Электронные цифровые весы работают следующим образом. В исходной позиции при отсутствии измерЯ емого объекта 3 на площадке 2 подвижная пластина 7, связанная с чувствительным элемен том 1, находится в центральном положении, при этом управляемые генераторы 11 и 12 имеют одинаковые частоты fi и fj, а разность частот Af на выходах 14 и 15 вычитателя 13 частот равна нулю, Af fi - fj 0. Кодовая комбинация на прямых выходах 17 реверсивного счетчика 16 импульсов имеет вид 0000 , а показания отсчетиого прибора 19 также равны нулю. В случае необходимости для корректировки исходного положе шя чувствительного элемента от регулируемого источника 39 тока через сум матор 24 в катушку 10 подается ток IQ началь ного тарирования. В режиме измерения массы т при установке объекта 3 на площадку 2 чувствительный элемент 1 вместе с подвижной пластиной 7 перемещается, генераторы 11 и 12 рассогласовываются и на выходах 14 и 15 вычитателя частот появляется сигнал разностной частоты Af fj - fj. Реверсивный счетчик 16 производит подсчет количества импульсов N разностной частоты, пришедших за время процесса уравновешивания (переходного процесса), и через прямой выход 17 управляет преобразователем 20-код-аналог, производя изменение относительной длительности интервала времени (при постоянной длительности тактовых импульсов, Т const) и далее, регулируя среднюю величину i компенсационного тока 1, подаваемого в виде импульсов тока одинаковой амплитуды - const), но различной относительной длительности, в катушку Ш компенсатора 8. Компенсационный ток I создает уравновешивающее усилие F, возвращающее чувствительный элемент 1 в исходное положение. Процесс автоматического изменения величины I происходит до тех пор, пока на прямых выходах 17 счетчика 16 не наберется кодовая комбинация, пропорциональная измеряемой массе т объекта 3 (с погрешностью квантования реверсивного счетчика 16). Отсчет измеряемой массы т ведется по отсчетному прибору 19, который кадшбруется в единицах массы. После того, как было произведено уравновешивание компенсационным током I разбаланса чувствительного элемента 1, последний возвращается в исходное состояние, а его подвижная пластина 7 занимает центральное положение. При зтом частоты fi и f j генераторов 11 и 12 становятся одинаковыми, разность частот Af на выходах 14 и 15 вьиитателя 13 частот равна нулю, Af О, и реверсивный счетчик 16 останавливается, запоминая набранную кодовую комбинацию, пропорциональную величине измеряемой массы т объекта 3. При измерении массы rrij (взвещивании) объекта 3 во время переходного процесса за счет наличия колебательных звеньев (чувствительный элемент 1 и подвеска 4 и т.д.) могут-быть участки перерегулирования, .когда значение компенсирующей силы f больше значения измеряемой сяпы тяжвстя (веса) Р объекта 3, а при снятии измеряемого груза значение Р,-F может стать отрицательным. В эти моменты времени на схему 35 совпадения по входу 30 логической цепи 28 поступает сигнал вычесть выхода 15 вычитателя 13 частот и сигналы N, получаемые с инверсных выходов 18 реверсивного счетчика 16 по входу 31 логической цени 28. В этом случае схема 35 совпадения выдает сигнал на триггер 36, который с,помощью клю ча 38 подключает отрицательный источник 37 тока (величиной - 2 для создания запаса регулирования), который через сумматор 24 поступает иа катушку 10 компенсатора 8, изменяя направление тока в катушке 10, что позволяет отработать отрицательные значения силы. Для отключения источника 37 тока, при получении обратного соотношения сил, на схему 34 совпадения по входу 29 логической цепи 28 подается сигнал сложить, с выхода 14 вычитателя 13 частот тока и разрешающие сигналы N по входу 32 логической цепи 28 с прямых выходов 17 реверсивного счетчика 16. В этом слу чае схема 3.4 совпадения переключает триггер 3 который отключает отрицательный источник 3 тока, замыкая ключ 38 на землю. Описанное выполнение электронных цифровых весов повышает их точность и надежность, так как умеш11иается составляющая погрешность обусловленная обратным преобразователем (пре образователем кода в ток) и повышается надежность схемы за счет использования однополярного источника тока вместо двухполярного. В результате диапазон изменения тока опорного источника тока сужается, что ведет к возможности повышения точности такого опорного источника тока и весов в целом, особенно прн измерении малых масс. Формула изобретения 1. Электронные цифровые весы, содержащие закрепленный на подвеске чувствительный 7 4 элемент, связанный с преобразователем некомпенсации, подключенным к управляемым генераторам, выходы которых подключены к вычитателю частот, подсоединенному к реверсивному счетчику с прямыми к инверсивными выходами, отсчетный прибор, компенсатор и преобразователь код-аналог, отличающиеся тем, что, с целью повышения точности и надежности, в них введены сумматор и логическая цепь в виде двух схем совпадения, триггера, ключа и источника тока,.причем входы логической цепи подключены к выходам вычитателя частот и к прямым и инверсным выходам реверсивного счетчика, а выход логической цепи соединен с одним из входов сумматора, вторст вход которюго подключен к выходу преобразователя код-аналог. 2. Весы по п. 1, отличающиеся тем, что преобразователь код-аналог выполнен в виде последовательно соединенных прюобразователей кода в относительную длительность интервала времени и относительной длительности интервала времени в ток. Источники информация, принятые во внимание при экспертизе 1.Сарахов И. А. Весы в физико-химических исследованиях. М., Наука, 1968, с. 53-72. 2.Авторское свидетельство СССР № 186560, кл. G 01 R 36/01, 1964. 3.Кнорринг В. Г. и др. Новый метод построения цифрювых компенсационных приборов для измерения механических величин. Сб. Цифровые измерительные и управляющие ус1ройства Труды Ленинградского политехнического ин.ститута им. М. И. Калинина. Л., 1%5, N 256, с. 3-9 (прототип).
f
Sr
S3, /СЛ M
30
яа «lu-u -j .«stsa
3§ Ы ЙЗ
--.J
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронные цифровые весы | 1981 |
|
SU966502A1 |
| Цифровые весы | 1982 |
|
SU1089423A1 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Весоизмерительное устройство | 1979 |
|
SU918793A1 |
| Преобразователь постоянного напряжения в многоступенчатое квазисинусоидальное | 1980 |
|
SU905962A1 |
| Многоточечный сигнализатор уровня | 1982 |
|
SU1114889A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2231075C1 |
| Акселерометр | 2017 |
|
RU2653140C1 |
| Адаптивный регулятор для управляемых вентильных преобразователей /его варианты/ | 1983 |
|
SU1104629A1 |