Изобретение относится к электроизмерительной технике и предназначено для применения в цифровых мостах переменного тока, измеряющих комплексные сопротивления и проводимос- ти.
Цель изобретения - повышение быст- родействня и точности уравновешивания мостов переменного тока за счёт
регулирования порога срабатьшания детектора равновесия и использования информации о знаке приращений модуля выходного сигнала, величина которых меньше порога срабатывания детектора равновесия.
Ка фиг. 1 представлены вектс рные диаграммы процесса уравновешивания моста; на фиг. 2 - диаграммы изменения Модуля lUgbixl выходного сигнала моста; на фиг.З - структурная схема автоматического экстремального моста переменного тока; на фиг. 4 - схема операционного усилителя экстремум- детектора.
Процесс уравновешивания осуществляется за счет вьтолнения рабочих воздействий на уравновешивающие эпе- менты параметров р и q моста с чередованием последних от такта к такту.
Регулирование уравновешивающих элементов начинается с их старших разрядов (декад) и продолжается до достижения частных экстремумов по обоим уравновешиваемым параметрам, после чего приходят к регулированию следующих разрядов уравновешивающих элементов.
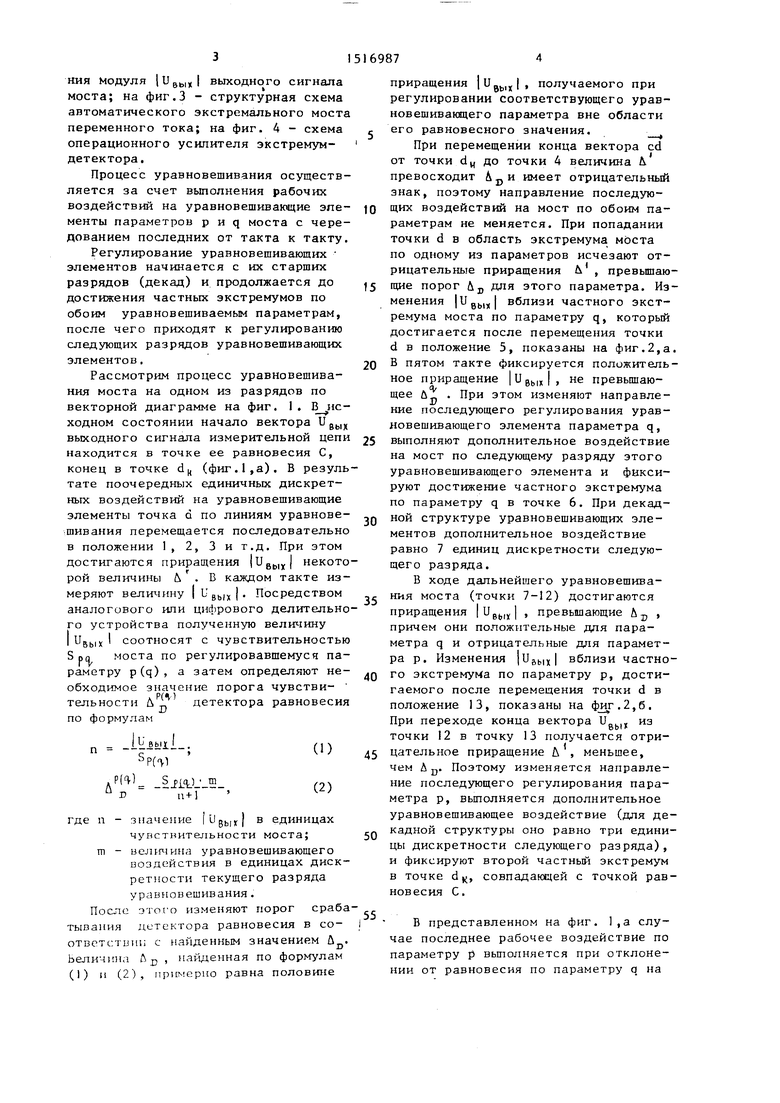
Рассмотрим процесс уравновешивания моста на одном из разрядов по векторной диаграмме на фиг. I. ходном состоянии начало вектора выходного сигнала измерительной цепи находится в точке ее равновесия С, конец в точке d (фиг.1,а). В результате поочередных единичных дискретных воздействий на уравновешивающие
элементы точка Q по линиям уравнове- .шивания перемещается последовательно в положении 1, 2, 3 и т.д. При этом достигаются приращения |Ugj,,| некоторой величины & . В каждом такте измеряют величину I и I . Посредством аналогового или цифрового делительного устройства полученную величину I Ug(,ix I соотносят с чувствительностью
S on моста по регулировавшемуся паг Т . . раметру p(q), а затем определяют не-
обходимое значение порога чувствир/в.
тельности Л „ детектора равновесия по формулам
D
и
BbJlJ
pf-vl
(1)
.P( V) Sj.) л п+1
(2)
где п - значение в единицах
чувстнительности моста;
тп - величина уравновешивающего
воздействия в единицах дискретности текущего разряда уравновешивания.
Поело этот о изменяют порог срабатывания детектора равновесия в со- oTBCTCTDiii; с найденным значением й. Ьеличина Лр , найденная по формулам (I) 11 (2), примерно равна половине
приращения , получаемого при регулировании соответствующего урав- новешиванлцего параметра вне области
его равновесного значения.
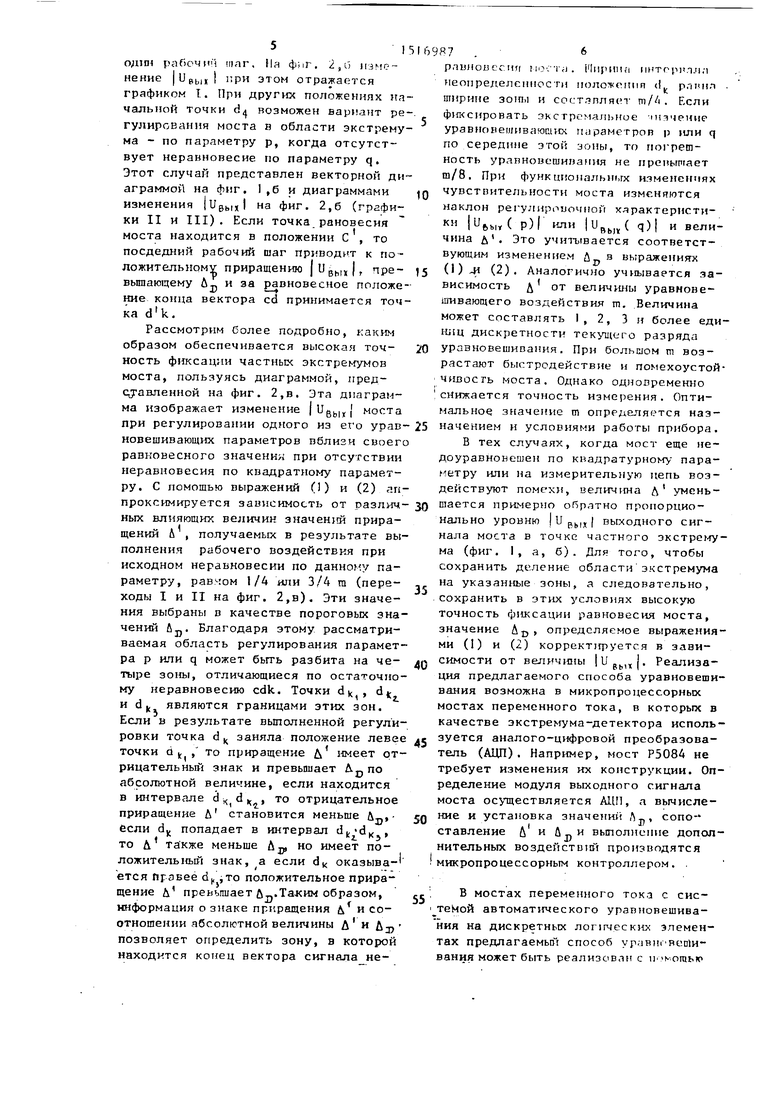
При перемещении конца вектора cd от точки djj до точки 4 величина L превосходит имеет отрицательный знак, поэтому направление последующих воздействий на мост по обоим параметрам не меняется. При попадании точки d в область экстремума моста по одному из параметров исчезают отрицательные приращения , превьшаю- щие порог &JJ для этого параметра. Изменения |Ug,| вблизи частного экстремума моста по параметру q, который достигается после перемещения точки d в положение 5, показаны на фиг.2,а, В пятом такте фиксируется положитель5
0
Q
и
Выи
не превьш1аюное приращение щее U . При этом изменяют направление последующего регулирования уравновешивающего элемента параметра q, выполняют дополнительное воздействие на мост по следующему разряду этого уравновешивающего элемента и фиксируют достижение частного экстремума по параметру q в точке 6. При декадной структуре уравновешивающих элементов дополнительное воздействие равно 7 единиц дискретности следующего разряда.
В ходе дальнейшего уравновешивания моста (точки 7-12) достигаются приращения , превышающие &р , причем они положительные для параметра q и отрицательные для параметра р. Изменения |Uj,bixl вблизи частного экстремума по параметру р, достигаемого после перемещения точки d в положение 13, показаны на фиг.2,б.
При переходе конца вектора и из точки 12 в точку 13 получается отрицательное приращение Л , меньшее, чем Д ц. Поэтому изменяется направление последующего регулирования параметра р, выполняется дополнительное уравновешивающее воздействие (для декадной структуры оно равно три единицы дискретности следующего разряда), и фиксируют второй частный экстремум в точке d, совпадающей с точкой равновесия С.
В представленном на фиг. 1,а случае последнее рабочее воздействие по параметру р вьтолняется при отклонении от равновесия по параметру q на
51
од1П1 рабочий IIлг. На ф:.ir, 2,6 изменение jUfn,,, при этом отражается графиком I. При других положениях начальной Точки d возможен вариант регулирования моста в области экстремума - ио параметру р, когда отсутствует неравновесие по параметру q. Этот случай представлен векторной диаграммой на фиг. 1,6 и диаграммами изменения jUgbijI на фиг. 2,6 (графики II И III). Если точка рановесия моста находится в положении с , то посдедиий рабочий шаг приводит к положительному приращению (Ug,,, |, превышающему uj) и за равновесное положение конца вектора cd принимается точка d k .
Рассмотрим более подробно, каким образом обеспечивается высокая точность фиксации частных экстремумов моста, пользуясь диаграммой, пред- цуавленной на фиг. 2,в. Эта диаграмма изображает изменение |Ugj,|K| моста при регулировании одного из его уравновешивающих параметров вблизи своего равновесного значени/i при отсутствии неравновесия по квадратному параметру. С помощью выражений (1) и (2) лп- проксимкруется зависимость от различных влияющих величин значен1ш приращений & , получаемых в результате выполнения рабочего воздействия при исходном неравновесии по данно у параметру, равном 1/4 или 3/4 m (переходы I и II на фиг. 2,в). Эти значения выбраны в качестве пороговых значений UJJ. Благодаря этому рассматриваемая область регулирования параметра р или q может быть разбита на четыре зоны, отличающиеся по остаточному неравновесию cdk. Точки d, и dк являются границами этих зон. Если в результате вьтолненной регулировки точка d заняла положение левее точки d , то приращение д имеет рт рицательный знак и превышает Д. по абсолютной величине, если находится в интервале , то отрицательное приращение Д становится меньше &д,- если d попадает в интервал d,d , то i также меньше ujj, но имеет по- ложительньп знак, а если оказыва- ется Правее d ,то положительное приращение д превышает ft.Таким образом, ннформация о знаке приращения и соотношении абсолютной величины Д и Д-р- позволяет определить зону, в которой находится конец вектора сигнала не87 .f
р липой ее ни . I liifuni.-i питгриллл неопределенности положсппп d, ршмш . ширине зо1п,1 и сост,пляет т/. Если фиксировать экстромал1)Ное -шачеине уравновешивающих параметров р или q по середине этой зоны, то rioi pem- ность уравновсшинамия не препьгп1ает ш/8. При Функцио11альи1,гх ияменеггчях
чувствительности моста изменяются наклон регулироьочпой хярактеристи- к |Ue,bir( Р)Г или |Ugj,( q)I и величина д . Это учи1Ъ1вается соответствующим изменением и в выражениях
(1)-И (2). Аналогично учиывается зависимость Д от величины уравновешивающего воздействия т. Величина может составлять I, 2, 3 и более еди- дискретности текущего разряда
уравновешипамия. При большом m возрастают быстродействие и помехоустой- 4tmocrb моста. Однако одновременно снижается точность измерения. Оптимальное значение m определяется назначением и условиями работы прибора. В тех случаях, когда мост еще не- доуравнонешен по квадратурному пара- или на измерительную цепь воздействуют помехи, величина д умсньшается примерно обратно пропорционально уровню I и gj,,, I выходного сигнала моста в точка частного экстре - ма (фиг. I, а, б). Для того, чтобы сохранить деление области экстремума на указанные зоны, а следовательно, сохранить в этих условиях высокую точность фиксации равновесия моста, значение Л определяемое выражениями (I) и (2) коррект1фуется в зависимости от величины |Ug,,|. Реализация предлагаемого способа уравновешивания возможна в микропроцессорных мостах переменного тока, в которых в качестве экстремума-детектора исполь
зуется аналого-цифровой преобразователь (АЦП). Например, мост Р5084 не требует изменения их конструкции. Определение модуля выходного сигнала моста осуществляется А11П, а вычисле- кие и установка значений Л.р, сопо- ставление и и Д.рИ выполнение дополнительных воздействий производятся микропроцессорным контроллером. .
В мостах переменного тока с сис- теМой автоматического уравновешивания на дискретных лопгческих элементах предлагаемый способ уравиг вещи- вания может быть реализован с И Амогаью
устройства, схема которого приведена на фиг.3.
Устройство работает следующим образом.
Синусоидальное напряжение с выхода генератора 14 поступает на мостовую измерительную цепь (МИЦ) 15, которая содержит многоразрядные уравновешивающие элементы параметров р и q. Уп- ю равляют ими с помощью вЬкодных кодов многоразрядных реверсивных счетчиков 16 и 17. Уравновешивание моста осуествляется импульсами, котдрые выра- батываются тактовым генератором 18, 5
а затем разделяются на импулйсы воздействий по параметрам р и q с помо- щью селектора, состоящего из счетного триггера 19 переключения параметра и логических схем И 20 и 2J. По- 20 даются импульсы воздействий на счетчики 16 и 17 через формирователи 22 или 23 величины m уравновешивающих воздействий, представляющие собой , генераторы пачек из га импульсов, и 25 распределители импульсов 24 или 25. Последние управляются счетчиком 26 разрядов уравновешивания. Выходной сигнал М1Щ через усилитель 27 сигнала неравновесия и амплитудный детек- 30 тор 28 поступает на входы двух экстремум-детекторов 29 и 30. Порог сра- батьшания экстремум-детектора 30 Выбран несколько выше уровня помех на его входе (на практике этот уро- jc вень соответствует 0,02. . .0,055). Порог срабатьшания экстремум-детектора 29 регулируется в зависимости от модуля сигнала неравновесия. Такая регулировка может осуществляться с по- JQ мощью включенного в цепь обратной связи операционного усилителя этого экстремум-детектора какого-либо элемента Ryoip с регулируемым сопротивлением: полевого транзистора, оптрона и т.п. (фиг. 4). При увеличении модуля выходного сигнала моста указанное сопротивление увеличивается и чувствительность Д.р экстремум-детектора-29 повышается. Соответствие из- .j менения 1, Формулам (1) и (2) достигается за счет регулирования сигнала управления элементом Ryap помощью J управляемого делителя напряжения, коэффициент передачи ноторого зависит от чувстнительности S и величины ypaBHoaeinnuaiouiero воздействия моста. В остальном работа экстремум-детектора ничем не отличается от известных
экстремум-детекторов экстремальных мостов переменного тока.
В зависимости от результата определения знака приращения модуля выходного сигнала моста, на выходах + и - экстремум-детекторов 29 и 30 в каждом такте формируются соответствующие логические сигналы. Например, если получено значительное отрицательное приращение, логические единицы устанавливаются на выходах - обоих экстремум-детекторов, если получено малое положительное приращение, то логическая единица устанавливается на выходе + только экстремум-детектора 30 и т.д. Эти Сигналы с помощью дешифратора 31 преобразуются в сигналы управления процессом уравновешивания.
Логика работы дешифратора следующая. При наличии логического сигнала на выходе - экстремум-детектора 29 сигналы на выходах дешифратора 31 отсутствуют . Уравновешивание, моста, происходит в направлениях изменения па- раметров р и q, определяемых состояниями триггеров 32 и 33 реверса, ко- управляют направлением счета многоразрядных реверсивных счетчиков 16 и 17. При попадании моста в область рановесия по одному из параметров исчезает сигнал на выходе - экстремум-детектора 29 и появляются сигналы на выходе - или + эк;стре мум-детектора 30 или одновременно на выходах + экстремум-детекторов 29 и 30. При этом появляется логический сигнал на выходах 1р и In (в зависимости от состояния ТПП) а также на одном из выходов 2р (2rt); Зр (За); 4 к (4а) соответственно; Сигналом с выхода IP (1л) опрокидывается один из триггеров реверса, а сигналами с выходов 2р(2а) - (fl) устанавливается величина дополнительного уравновешивающего воздействия. Формируемого блоков формирователей. Для декадной структуры уравновешивающих элементов она равна соответственно 3т, 7т или m импульсов, причем в первых двух случаях логическими схемами ИЛИ 34 и 35 одновременно вырабатывается сигнал логической единицы, который Поступает на сумматор 36, где суммируется с кодом счетчика 26.
Таким образом, в этих двух случаях дополнительное уравновешивающее
воздействие подается на следующую младшую декаду счетчцков 16 и 17, Сигналами с выходов 2р(2а).,.Ар(4„) дешифратора через элемен ты ИЛИ 35-38 также взводятся триггеры 39 и ДО фик сации равновесия. Если достигнуты оба частных экстремума моста, то взведенными оказываются оба эти триг гера, открывается схема И 41 совпаде ния и очередной тактовый импульс уве-- личивает код счетчика 26 на единицу и сбрасывает в исходное состояние триггеры. Далее уравновешивание мос-- та продолжается на следующем разряде аналогично.
Преимущества предлагаемого способа уравновешивания по сравненшо с известным обуслоплены более точной фиксацией частных экстремумов моста за счет использования информации как о знаке, так и о вeл гчинe приращений ( полученных в результате воз- действий на мост, и за счет регулирования порога чувствительности детектора равновесия. При использовании известного способа погрешность уравновешивания моста составляет пример.,
но - Предлагаемый способ
позволяет достичь погрешности, не
га
превьшагощей -Q-. На практике из-за о
влияния помех и упрощенной аппроксимации зависимости Д выражениями (1)
X ч. m
и (2) эта погрешность составляет -т
- --, т.е. в два раза меньше, чем
в известном способе. Это приводит к двукратному повьшению точности измерения и двукратному сокращению числа воздействий на каждом последующем разряде уравновешивания. Кроме того, сокращается число шагов на текущем разряде за счет более точного фиксирования первого частного экстремума, что исключает необходимость доуравно вешивания измерительной цепи после достижения второго частного экстремума. В итоге быстродействие прибора увеличивается в 2 раза. При использовании предлагаемого способа относительно свободен выбор величины m (в известном способе всегда равно 2) благодаря чему можно оптимизировать соотношение между точностью и быстро действием прибора в зависимости от его назначения и условий работы.
-
51698710
Формула изобретения
, -
10
15
20
25
30
35
40
45
50
55
1.Способ поразрядного уравновешивания цифровых автоматических экстремальных мостов переменного тока, заключающийся в том, что воздействуют на уравновешиваемые параметры моста
с чередованием от такта к такту, определяют после каждого воздействия наличие и знак вызванных им приращений модуля вькодного сигнала моста, превьппающих по величине порог срабатывания детектора равновесия, изменяют кгаправление следующего воздействия по тому же уравновешиваемому параметру при отсутствии приращений с отри- цателыагм знаком, при этом фиксируют достижение частного экстремума по соответствующему уравновешиваемому параметру, принимая за равновесное предпоследнее состояние моста при получении приращения с положительным знаком ипи промежуточное между предпоследним и последним состоянием моста, если полученное приращение не преьысипо порога срабатьюания детектора равновесия, переходят к уравновешиванию моста на следующем разряде после достижения частных экстремумов по обоим уравновешиваемым параметрам, отличающийся тем, ч то, с целью повышения быстродействия и точности уравновешивания, после каждого воздействия определяют величину мо- дуля выходного сигнала моста в единицах чувствительности моста по регулировавшему параметру, изменяют порог срабатывания детектора равновесия в зависимости от этой величины и фиксируют промежуточное состояние моста при достижении частного экстремума путем дополнительного воздействия на уравновешиваемые параметры моста в следующем разряде с учетом знака последнего приращения модуля выходного сигнала моста.
2.Способ по п. 1, отличающийся тем, что для определения величины п модуля выходного сигнала
д единицах чувствительности моста измеряют амплитуду и его выходного, сиг-, нала и вычисляют отношение последней к чувствительности S моста по регулировавшемуся параметру по формуле
и
а порог Д срабатываН1ш детектора равновесия определяют по формуле
п
П + Г
m - величина воздействия на урав- новегаиваемый параметр в шагах дискретности.
3. Способ по пп. I и 2, о т л и- чающийс я тем, что дополнив-
-
1516987I2
тельное воздейЬтвие на уравновешиваемый параметр моста составляет по величине 1/3 величины воздействия текущего разряда уравновешивания при отрицательном наке приращения амплитуды выходного сигнала моста и 2/3 этой величины, если этот знак положителен .


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока и устройство для его осуществления | 1985 |
|
SU1312490A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |
| Цифровой экстремальный мост переменного тока | 1987 |
|
SU1479882A1 |
| Способ выбора поддиапазона измерений в универсальных экстремальных мостах переменного тока | 1987 |
|
SU1429044A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Способ уравновешивания безмодуляционного экстремального моста переменного тока | 1980 |
|
SU966603A1 |
| Автоматический мост переменного тока | 1984 |
|
SU1213423A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока | 1982 |
|
SU1026063A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1987 |
|
SU1413537A1 |

Изобретение относится к электроизмерительной технике и предназначено для применения в цифровых мостах переменного тока, измеряющих комплексные сопротивления. Цель изобретения - повышение быстродействия и точности уравновешивания мостов переменного тока за счет регулирования порога срабатывания детектора равновесия и использования информации о знаке приращений модуля выходного сигнала, величина которых меньше порога срабатывания детектора равновесия - достигается тем, что после каждого уравновешивающего воздействия определяют наличие и знак приращения модуля выходного сигнала моста, при отсутствии отрицательных приращений изменяют направление следующего уравновешивающего воздействия, а при наличии положительных приращений фиксируют частный экстремум. После каждого воздействия на мост определяют величину модуля выходного сигнала в единицах чувствительности моста, изменяют порог срабатывания детектора равновесия в зависимости от этой величины, а промежуточное состояние моста при фиксации частного экстремума получают путем дополнительного уравновешивающего воздействия на следующем разряде уравновешивания. Способ позволяет в два раза точнее фиксировать частный экстремум. Это приводит к двукратному сокращению числа рабочих воздействий на каждом разряде уравновешивания. 2 з.п. ф-лы, 4 ил.
° «ем
-J и 2 УЛЧ
йа фув.Т
Фие.г
Фиг.-З
УиГ
| Проблемы технической электродинамики | |||
| - Киев: Наукова думка, 1978, вып | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока | 1982 |
|
SU1026063A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
