, Изобретение относится к области измерительной техники и может быть использовано в экстремальных мостах переменного тока для измерения параметров комплексных сопротивлений.
Цель изобретения - повышение быстродействия измерения за счет одновременной модуляции первого и второго параметров моста в произвольном направлении .
Способ может использоваться при уравновешивании мостовых цепей с прямыми линиями уравновешивания для измерения двух абсолютных параметров, получивших наибольшее применение.
Сигнал неравновесия такой цепи описывается уравнением
Sp-p+jS.,(1)
где ,Sq - чувствительности по параметрам р и q соответственно;
p,q - неравновесие по параметрам р и q;
k - коэффициент передачи тракта обработки сигнала неравновесия;
Ufl - напряжение сигнала неравновесия.
В соответствии с предлагаемым спо- собом производится одновременная/но-, дуляция по параметрам р и q на величину Др и Aq соответственно. Исходя из этого, можно записать систему уравнений
fSp-p+jS,,. ; . , , jSj Cp+Ap)+jSv (q+4q)kU , где Uj - сигнал неравновесия после модуляции.
Поделив первое уравнение системы на второе, исключают влияние коэффициента к и получают
ел
СП
СЛ
С&
sl
СО
.j §ILEiiSa.
SpTp+Ap +jS(q+йq) U,
(3)
После некоторых преобразований уравнения (3) можно получить
Sp-p+iSvqA 8lAg±i§l i. (4)
Ив и U можно представить в виде Uo-Uoc+JUoK и U,Utc +JU1K ,
где Uoc и U1C - синфазные составляющие U0 и Uj,;
UQV, и U1K - квадратурные составляющие U0 и U1 .
Подставляя эти выражения в (4), выделяя мнимую и действительную составляющие правой части уравнения, и приравнивая их соответственно мнимой и действительной составляющим левой части уравнения, получают два уравнения
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уравновешивания экстремальных мостов переменного тока | 1987 |
|
SU1474555A1 |
| Способ уравновешивания безмодуляционного экстремального моста переменного тока | 1980 |
|
SU966603A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Способ автоматического уравновешивания моста переменного тока для измерения одной составляющей комплексной проводимости | 1980 |
|
SU868601A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |
| Способ поразрядного уравновешивания автоматических экстремальных мостов переменного тока | 1988 |
|
SU1516987A1 |
| Цифровой экстремальный мост переменного тока | 1987 |
|
SU1479882A1 |
| Автоматический мост переменного тока | 1979 |
|
SU853560A1 |
| Способ выбора поддиапазона измерений в универсальных экстремальных мостах переменного тока | 1987 |
|
SU1429044A1 |
| Автоматический мост переменного тока | 1979 |
|
SU834536A1 |
Изобретение относится к измерительной технике и может быть использовано в измерителях параметров комплексных сопротивлений. Цель изобретения - повышение быстродействия измерения за счет одновременной модуляции первого и второго параметров моста - достигается путем измерения синфазной и квадратурной составляющих сигнала неравновесия моста в произвольном ортогональном базисе до и после модуляции, определения величины и направления изменения параметров моста по приведенным соотношениям. Способ позволяет в 2,5 раза по сравнению со способом-прототипом увеличить быстродействие измерительных приборов. 2 з.п. ф-лы, 1 ил.
Uot( -иос ) +UOK (И« -UOK ) (UotUp -Uoc U1K ) Л g )-.
LUOC (U,) (W-UoKWAa-KUosUic -u°tu )|g
qТи,с-иос)г+Ти1К-и0к)г
В уравнения (5) и (6) входят такие параметры, как up, &q . Величины А Р и Д q являются модуляционными приращениями параметров и могут быть сформированы с точностью, равной точности самой измерительной цепи. Величины. Sp и Зл известны с большой Погрешностью, однако их отношение
Ofl
известно с очень высокой точностью и, фактически, равно отношению образцовых мер по параметрам р и q.
Таким образом, все величины, входящие в (2) и (3), известны или сформированы с высокой точностью, равной точности измерительной цепи. Отсюда следует, что предлагаемый способ не имеет методической погрешности и позволяет определять неравновесия с точностью, равной точности измерительной цепи за два такта.
Следовательно, для уравновешивания моста необходимо два такта, в то время как по известному способу необходимо пять тактов, т.е. быстродействие увеличивается в 2,5 раза. В то же время можно утверждать, что уравновешивание за два такта является максимально быстрым для экстремальных мостов переменного тока.
Возможно несколько модификаций предлагаемого способа.
Первая - когда значение одного из
модуляционных воздействий (например,, ) равно нулю. Тогда выражения для определения уравновешивающих воздействий имеют вид
.. 2+У,аь.У1к.::У «ЙА а..
f
Р (U1C -Uoc )2+(U K-UOK)2
(7)
(5) (6)
ийьи,с -UOCU K-AE р (G7C -u cF+T T-uoKУ«2
(8)
0 5
0
5
5 I
0
5
0
Вторая модификация - поочередная модуляция параметров. В этом случае на определение неравновесия тратится уже три такта - до модуляции, модуляция по одному параметру и модуляция по другому параметру. Однако в этом случае не требуется информации об отношении чувствительностей:
Uoc (U,c -иос)+и0к( -UOK ) 4 ,0ч
p (u uac F+Zu:,)5 --UP; w
JVOJ -UocbUocCUzfc-UbK), f
4 иьГчГ Т +7и-ЗГ Т 1 Aq 10)
Uoc +.игц.-и0)- )
где ,U1K - синфазная и квадратурная составляющие сигнала неравновесия после модуляции по параметру р;
синфазная и квадратурная составляющие сигнала неравновесия после модуляции по параметру q.
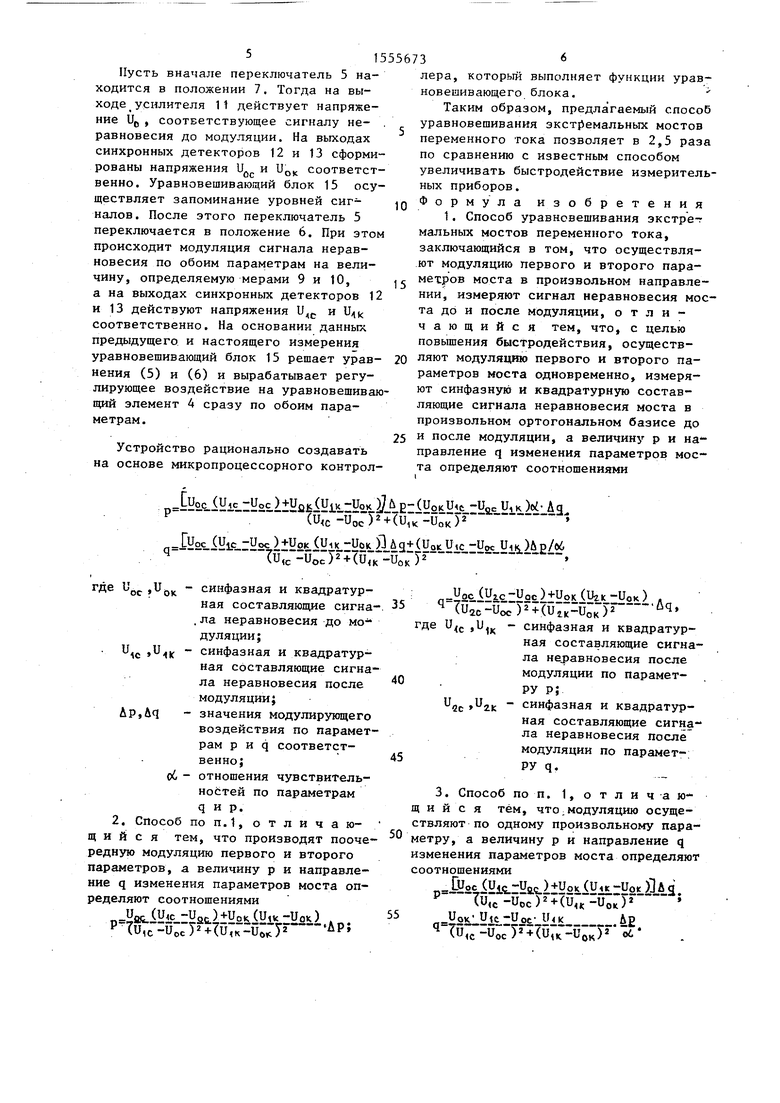
На чертеже представлено устройство, реализующее предлагаемый способ.
Устройство содержит генератор 1 синусоидального напряжения, измерительную цепь 2, составляющую из объекта 3 измерения и уравновешивающего элемента 4, переключатель 5 на два положения 6 и 7 с подвижным контактом 8, меру 9 емкости, меру 10 сопротивления, усилитель 11, два синхронных детектора 12 и 13, фазовращатель 14 на 90°, уравновешивающий блок 15.
Устройство работает следующим образом.
Пусть вначале переключатель 5 находится в положении 7. Тогда на выходе усилителя 11 действует напряжение U0, соответствующее сигналу неравновесия до модуляции. На выходах синхронных детекторов 12 и 13 сформированы напряжения U0c и UOK соответственно. Уравновешивающий блок 15 осуществляет запоминание уровней сигналов . После этого переключатель 5 переключается в положение 6. При этом происходит модуляция сигнала неравновесия по обоим параметрам на величину, определяемую мерами 9 и 10, а на выходах синхронных детекторов 12 и 13 действуют напряжения U4C и соответственно. На основании данных предыдущего и настоящего измерения уравновешивающий блок 15 решает уравнения (5) и (6) и вырабатывает регулирующее воздействие на уравновешивающий элемент 4 сразу по обоим параметрам.
Устройство рационально создавать на основе микропроцессорного контрол Uoc (U,e -Uoc )+Uflfc(U1K 4J0K $Ь E-(UOKU4t -Ugc U,K )ei- Aq. р..„ f
UOC (ULc -Uoc )+UOK (Une -UOK )1 iq+(UoKU,c -и и,ь)АЕ/в6 .
где Uoc ,UOK - синфазная и квадратурная составляющие сигна- .ла неравновесия до модуляции;
идс ,U1)C - синфазная и квадратурная составляющие сигнала неравновесия после модуляции;
Ap,uq - значения модулирующего воздействия по параметрам р и q соответственно;
об - отношения чувствитель- ностей по параметрам q и р.
JJ-ttJtt-UaJ+UoKOJut-UoK) .„.
p-Tutc u;c T Tu7K u;.
0
5
лера, который выполняет функции уравновешивающего блока.
Таким образом, предлагаемый способ уравновешивания экстремальных мостов переменного гока позволяет в 2,5 раза по сравнению с известным способом увеличивать быстродействие измерительных приборов. Формула изобретения
,и2К
овНае.1Ь«.ос)+«Јь1&«чЯок) Лл Ч (Uac-Uoc)2 + (UlK-UOK)« uq где ,U1K - синфазная и квадратурная составляющие сигнала неравновесия после модуляции по параметру Р;
синфазная и квадратурная составляющие сигнала неравновесия после модуляции по параметру q.
Шос (Ui L-Uat)+UoK ( )А 3 Р ТОГс -Uoc )2 +Т0„ -U0 J2 OK UR-UOC- U4K АЕ
q -и;лг+(и,)г
| Авторское свидетельство СССР № 756301, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ уравновешивания экстремальных мостов переменного тока | 1987 |
|
SU1474555A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
