ffxaa
sssss
У ДД«
Изобретение относится к подъемным устройствам, а именно к лебедкам с регулируемым натяжением каната.
Целью изобретения является снижение металлоемкости и энергозатрат путем автоматического регулирования работы лебедки в зависимости от нагрузки, а также расширение эксплуатационных возможностей лебедки.
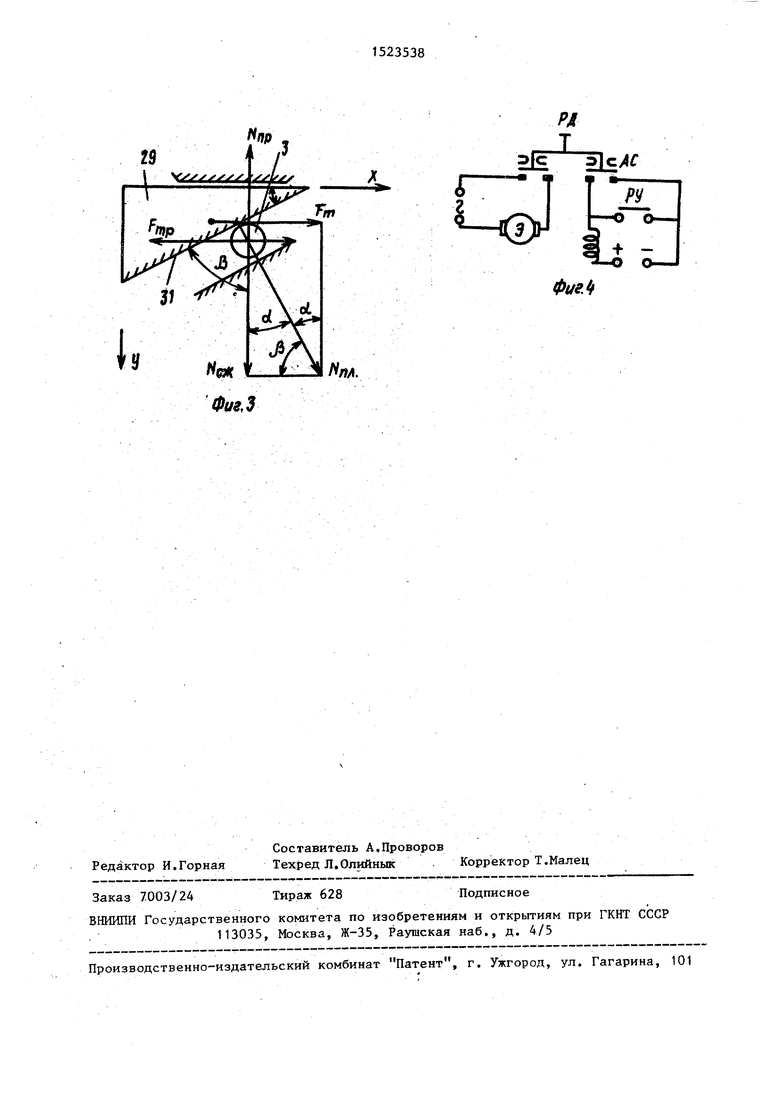
На фиг.1 изображена тяговая лебедка, .разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - схема сил взаимодействия валика с направляющими; на фиг.4 - электрическая схема включе- ния сцепления о
Тяговая лебедка содержит корпус 1 с установленным в нем барабаном 2, рабочая поверхность которого образована валиками 3, расположенными один от другого с просветами 4, и оснащена приводом, взаимодействующим через выходйой вал 5, шестерню 6, зубчатый венец 7 с барабаном 2, Привод включает редуктор 8 с типЬвьми устройст- вами самоторможения при отказе двигателя, подключенный к реверсивному электродвигателю 9 с кабелем 10 питания и управления.
Валики 3 закреплены с возможностью вращения в ползунах 11, надетых на радиальные направляющие, выполненные в виде трубчатых спиц 12, ввинченных резьбовыми концами в ступицы 13. Внешние концы спиц вьшолнены с головкой 14 под ключ. Спицы со cтyпицa ш по разные стороны валиков образуют два ограничивакнцих диска: левый 15 и правый 16, которые соединены жестко между собой трубчат№4 валом 17с об- разованием одной катушки 18. На валу 17 закреплена ступица 13. Указанная катушка 18 закреплена одной стороной через вал 17 в подшипнике 19 скольжения на корпусе 1, а другой надета на опорный вал 20, закрепленный в другом подпшпнике 21 корпуса 1. Для проверки технического состояния спиц и ползуно В корпусе 1 имеются смотровые лючки 22 и 23о На спицы 12 надеты пружины 24 сжатия, упиракяциеся в ползуны 11. Для регулировки силы прижатия выполнены подвижные упорные муфты 25, закрепляемые винтами 26, входящими в специальные углубления на поверхности спиц.
Для передачи момента вращения от привода служит дополнительная катушка 27, трубчатьй вал 28 которой надет
JQ
15
0 5
Q Q 5
5
5
на трубчатьп вал 17 первой катушки 18, а левый 29 и правый 3.0 ограничительные диски расположены между соответствующими ограничивающими дисками 15 и 16.
На дисках 29 надет зубчатый венец 7. Для прохода валиков 3 в ограничительных дисках 29 и 30 выполнены щелевые направляющие 31.
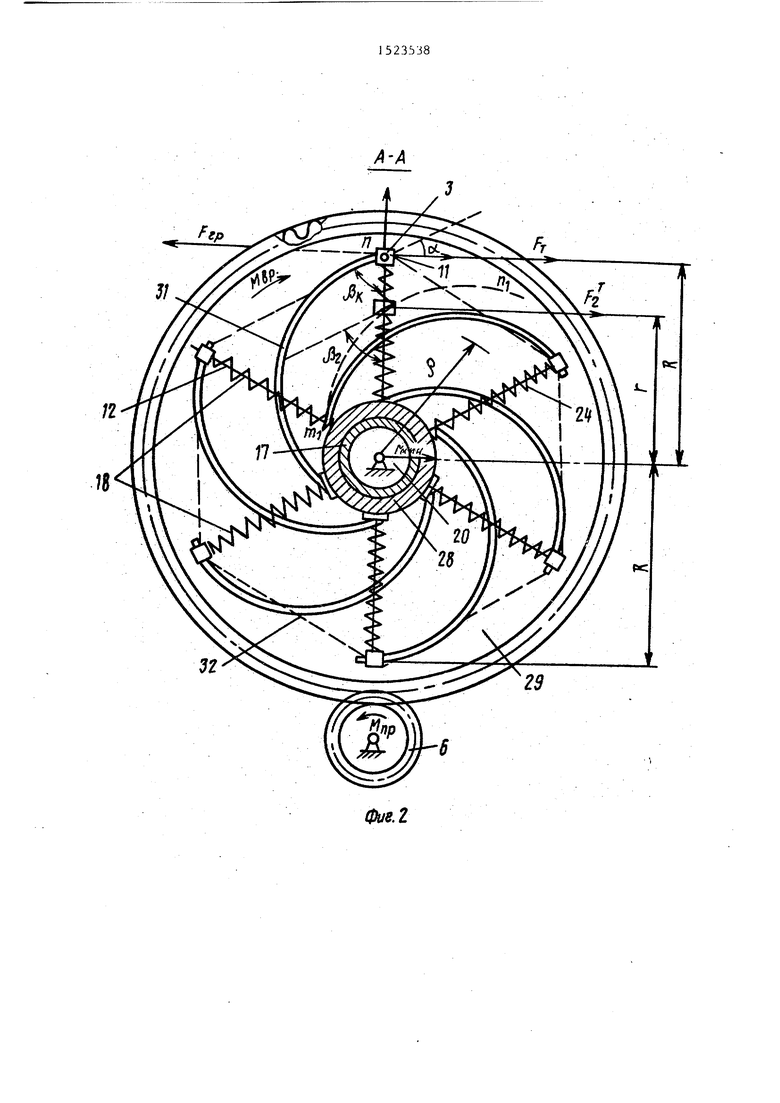
Щелевые направляющие 31 (фиг.2) вьшолнены приближающимися к центру барабана. Допускаются различные формы направляющих, в частности прямые, но лучшими показателями обладают направляющие, вьтолненные по форме логарифмической спирали, расположенные равномерно по окружности. Логарифмическая спираль обладает тем достоинством, что угол ее наклона по отношению к радиусу, проведенному в точку пересечения, одинаков независимо от величины радиуса. Направлены щелевые направляющие от центра к краю диска в сторону действия привода вращения
Таким образом, валики 3 оказываются установленньми одновременно и в щелевых направляющих 31 и радиаль- ньк направляющих в виде спиц 12 На одном из валиков 3 закреплен конец гибкой тяги, вьшолненный в виде навиваемого каната 32.
Катушка 18 барабана 2 и дополнительная катушка 27 могут быть введены в зацепление друг с другом посредством устройства 33 сцепления, сос- . тоящего из опорного вала 20, укреп ленного с возможностью продольного перемещения в подшипнике 21, имеющего на конце пщицевые выступы 34, проходящие насквозь через соответст- вуюпще прорези 35 к 36 в трубчатом валу 17 и валу 28 соответственно. При этом за шлицевой прорезью 36, выполненной на участке входа вала 20 в катушку 27, расположена цилиндрическая полость 37 с диаметром, обеспечи- ванмцим свободное без зацепления со второй катушкой проворачивание шли- цевых выступов 34. За цилиндрической полостью далее влево располагаются внутренние шлицы 38 на валу 28, сцепляемые с соответствукнцими шлицевыми выступами 34 опорного вала 20 при продольном его продвижении.
Продольное перемещение вала 20, подпружиненного пружиной 39 расцепления, осуществляется электромагнитом 40, закрепленным на корпусе 1 и свя- ,
5152
занным.поворотным толкателем 41 с сердечником 42. При включении электромагнита 40 тяга толкателя 41 продвигает вал и зацепляет между собой шлицевые выступы 34 и внутренние шпица 38, сцепляя между собой катушки 18 и 27.
Включение устройства 33 сцепления выполняется (фиг.4) ручным нажатием с пульта отдельной кнопки РУ, включающей питание электромагнита 40, либо автоматическим включением перемычки АС, жестко связанной с кнопкой реверсирования РД электродвигателя. Система блокировки катушек необходи-г ма для фиксации радиуса л барабана в промежуточньк положениях между знв
чениями R и Гд,„ (фиг.2),. а также во избежание самопроизвольного втягивания ослабленного при расстопоровке каната за счет увеличения диаметра барабана под действием пружин 24.
Конструкция соединения двух катушек 27 и 18 обеспечивает при их отно- сительном повороте навстречу друг другу под нагрузкой продвижение валиков 3 по щелевьм направляющим 31 и одновременно приближение по направляющим, образовакны - спицами 12, к центру барабана. При этом пружины 24 сжимаются, радиус рабочей поверхности барабана уменьшается. Минимальное возможное значение радиуса г ц.,, определяется диаметрам валиков 3, когда они при полном сближении касаются один другого.
Максимально значение радиуса R барабана определяется расположением внешнего упорного конца щелевой направляющей 31.
Пружины 24 работают совместно, и действие их в радиальном направлении складывается, поскольку сжатие указанных пружин определяется взаимным .поворотом катушек.18 и 27. При этом достаточно даже одной пружины 24, чтобы система под нагрузкой обеспечивала радиальное сжатие барабана.
При этом обеспечивается неизменная загрузка двигателя при колебаниях передаваемой от каната силовой нагрузки , которая определяется весом груза о При этом предполагается, что изменение FppOT некоторых минимальных значений до максимальных обеспечивается при неизменном крутящем моменте, передаваемом от двигателя 9 на зубча- тьй венец 7.
Из этого условия определяют максимальное усилие тяги F-j , передаваемое на канат, которое достигается при минимальном радиусе барабана, равном
МИН
макс
Mji
г/мим
предварительное суммарное сжатие всех пружин в радиальном направлении, необходимое для обеспечения F:.., определяют исходя из следующей модели, характеризукицей процесс взаимодействия элементов системы (фиг.З) Дейст
вие направлякщей 31, поджимающей валик и сжимающей пружину 24, можно представить как действие на в алик 3 наклонной плоскости (это часть диска 29), имеющей наклонную поверхность под углом к радиусу, проведенному к оси валика 3 в месте набегания на барабан 2 навиваемого каната.
В случае, когда сила на канате Ffp больше, чем сила тяги F , валик 3 не перемещается под действием усилия, передаваемого наклонной плоскостью в направлении натяжения каната и начинается перемещение самой наклонной плоскости по направлению оси X (трение в самой системе леблдки не учитывают, так как это не изменяет сути процесса). При этом .валик 3 начинает перемещаться по радиусу к центру ба- рабана. Для предотвращения указанного перемещения необходимо, чтобы составляющая Nj, от реакции наклонной плос
кости Nf, была равна N пр - усилию, развиваемому пружиной (одной или, что то же самое, всеми, все пружины в своем действии складываются).
Условие равновесия альном направлении
валика в ради
,tg/5.
В случае логарифмической спирали на участке деформирования от г, до R наблюдается прямолинейная зависимость между усилием Fr-p и усилием F. , формируемым сжатой пружиной При- ближение каждого валика к оси барабана осуществляется пропорционально увеличению нагрузки в заданном диапазоне. В связи с этим силу тяги, рс гшзуемую на канате, можно определять, измеряя ход пружин при работе лебедки.
Вьшолнение поверхности барабана в виде системы вращающихся валиков 3 обеспечивает более равномерную навивку каната на барабан, так как усилия нажатия каната на барабан, выравниваются в связи с обкатьшанием роликов. Снижается также износ каната в связи с уменьшением сил трения.
Тяговая лебедка работает в двух режимах: заданном и автоматически регулируемом.
В заданном режиме катушки 18 и 27 блокированы устройством 33 при определенном заданном радиусе р ), пере мьика РУ (фиг.4) замыкает цепь электромагнита 40, опорный вал 20 смещается влево (фиг.1) и соединяет между собой посредством шлицевьк выступов 34 валы 17 и 28. Для вьшода барабана на заданный радиус р конец каната 32 жестко заанкеривается, включается электродвигатель 9 привода при разомкнутом сцеплении. После сжатия пружин 24 под действием взаимного пово- рота катушек 18 и 27 до заданного радиуса катушки блокируются между собой посредством устройства 33. Таким образом, обеспечивается возможность регулировки скорости намотки каната и соответственно усилия тяги.
В режиме автоматического регулирования катушки 18 и 27 разблокированы, т.е. устройство 33 разомкнуто. Цель автоматического регулирования - обес- печить поддержание неизменного режима работы привода, что обеспечивает наиболее экономичное расходование энергии.
Автоматическое регулирование осуществляется за счет изменения линейной скорости продвижения каната. При этом, если уменьшается эта скорость, то увеличивается тяговое усилие F-p, передаваемое от привода на канат и наоборот. Указанные изменения осуществляются путем уменьшения или увеличения радиуса барабана О при сжатии пружин 24. Последние сжимаются (фиг.2 и 3) путем продвижения роликов
щелевыми направляющими 31 при остановленной первой катушке 18, что обеспечивается при Frp F. При продвижении валиков к оси барабана постепенно увеличивается сила тяги , , пока .она не станет больше, чем F,- , и не начнет двигать валики 3 вместе с первой катушкой. Это происходит, когда
F F - 7 FT р .
где - номинальный момент привода Таким образом, в рассчитанном диапазоне от Fpp „ до ciKC тяговая лебедка автоматически приспосабливается к меняющимся условиям работы что особенно важно для условий транспортирования.
Формула изобретения
1. Тяговая лебедка, содержащая ус тановленньй .в корпусе приводной барабан с навиваемой на него гибкой 1тягой и подпружиненные валики в системе передач от привода к гибкой тяге, отличающаяся тем, что, с целью снижения металлоемкости и энергозатрат путем автоматического регулирования работы лебедки в зависимости от нагрузки, рабочая поверхность барабана образована упомянутыми валиками, концы которых снабжены ползунами, установленными с возможностью перемещения на радиальных направляющих, на .которых установлены упомянутые пружины, при этом на барабане между радиальными направляющими с возможностью вращения смонтирована связанная с приводом катушка с боковыми дисками, в которьпс выполнены в форме логарифмической спирали щелевые направляющие, взаимодействующие с упомянутыми валиками.
2 о Лебедка по п.1, о т л ич а-. ю щ а я с я тем, что, с целью расширения эксплуатационных возможностей, она снабжена устройством сцепления катушки с барабаном.
n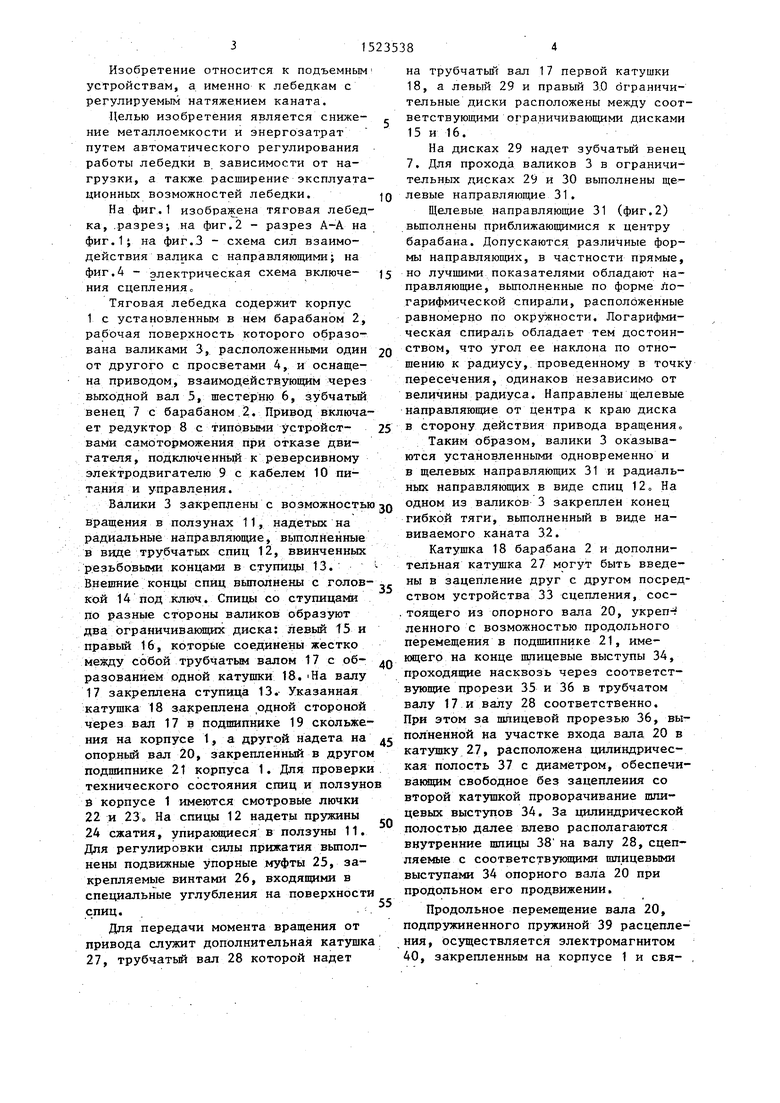
Изобретение относится к подъемным устройствам, а именно к лебедкам с регулируемым натяжением каната. Целью изобретения является снижение металлоемкости и энергозатрат путем автоматического регулирования работы лебедки в зависимости от нагрузки, а также расширение эксплуатационных возможностей лебедки. Лебедка состоит из корпуса 1 с барабаном 2, рабочая поверхность которого образована валиками 3, последние подпружинены и имеют возможность под действием нагрузки перемещаться одновременно по радиальным направляющим - спицами 12 барабана 2 и в направляющих 31 дополнительной катушки 27, выполненных по форме логарифмической спирали. Лебедка снабжена устройством 33 сцепления барабана и дополнительной катушки. 1 з.п. ф-лы, 4 ил.
Фи8.2
Фиг,3
Редактор И.Горная
Составитель А.Проворов
Техред Л.Олийнык Корректор Т.Малец
Заказ 7003/24
Тираж 628
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
ФиеЛ
Подписное
| РЕГУЛИРУЕМЫЙ ГЕНЕРАТОР ЗУБЧАТОЙ ВОЛНОВОЙПЕРЕДАЧИ | 0 |
|
SU171712A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
