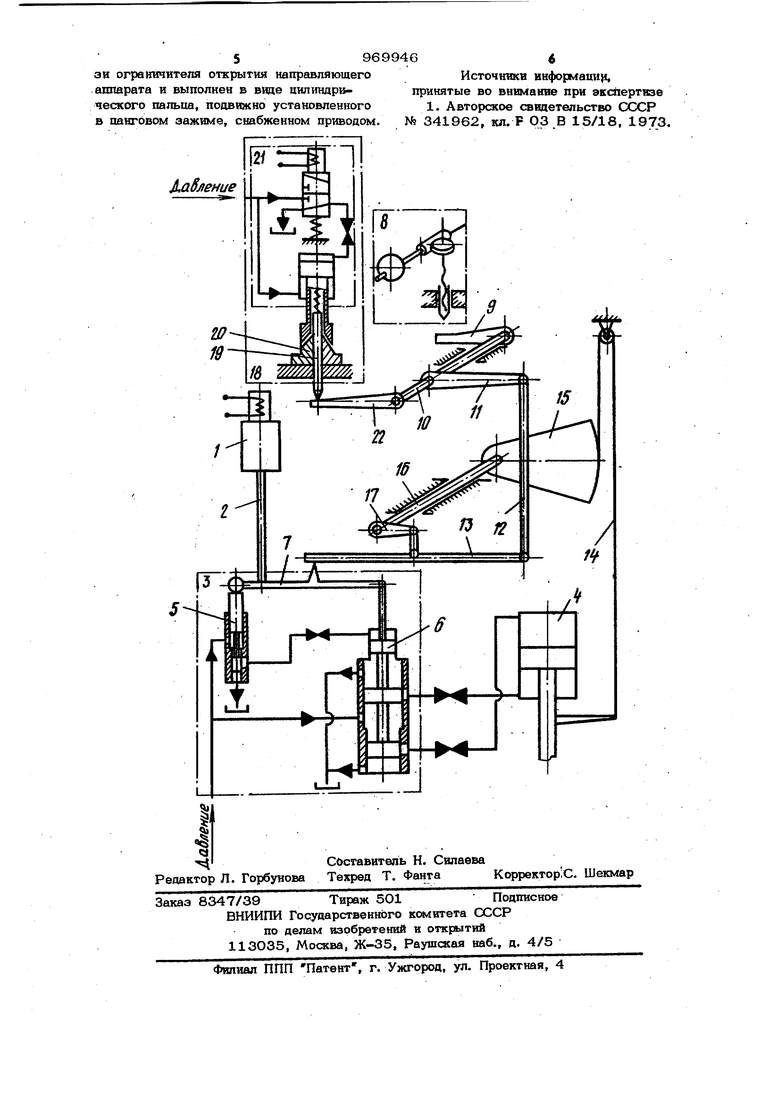
Изобретение относится к области гщи ромвшиностроення. Известны автоматияескне регуляторы скорости гидротурбин, содержаогие гидромехашгпескор устройство усилеош, снабженное электрогтаравлическвм щюобразователем сигналов улравлешга, в огр нвчвтепь открытия направляющего аппарата, соединенный механическими прямой я обратной связями с сервомотором, упра при помощи золотника, и сочпёненный с последним фиксатор для блокирования положения сервомотора. Фиксатор выполнен в виде плавающего упора, состоящего из зубчатой рейки и тросовой передачи, связывающей рейку с сервомотором и сервомотор с золотником. Фвксаоия положения рейки осуществляется посредством защелки, управляемой электромагнитом, срабапывакогам от сипналов о неисправностях в системе регулирования l. Такое выполнение регулятора сложно по конструкции наличия в фнксаторе кинематических связей, обеспечивакшшх блокирование йоложения cejeoMOTOrра в кинематических связей ограничит ля открытия, та-за чего возможно смешение направляющего аппарата после ш дачи сигнала о неисправностях в системе регулирования. Цепь изобретения - упрощение KOHCI рукцив регулятора и повышение точности блокирования. Пост 1вленная цель достигается тем, что фиксатор подключен к промой ссязв ограничителя открытия направляющего аппарата и выполнен в виде цилиндрического пальца, подвижно установленного в цанговом зажиме, снабженном приводом. На чертеже представлена схема aBTOiматического регулятора скорости гидротурбины. Регулятор содержит гидромеханическое устройство 1 усиления, включающее 8nei трогидравлический преобразователь сигналов управления (не показан), кинематичеоки связанный через толкатель 2 с золо1 mncoM 3. Золоттпс 3 управляет сервомото ром 4, являющимся выходным звеном гид ромеханического устройства 1 усиления. Золотш-ш 3 снабжен собств€;нным гидравлическим усилителем, состоящим из побудительного золотника 5 и вспомогательного сервомотора 6, соединенного об ратной связью 7 с золотником 5. Для ограничения хода сервомотора 4, управляющего открытием направляющего аппарата гидротурбины, устройство 1 уси ления имеет ограничитель напра лзющего аппарата, состоящий ТЕЗ редуктора 8, прямой и обратной механических связей. Прямая связь от редуктора 8 к золотнику 3 осуществляется через рычаг 9 и вал 1О, кинематически связанный через рычаг 11, тягу 12 и рычаг 13с золотником 3. Обратная связь от серво мотора 4 к золотнику осуществляется тросовой передачей 14, сектором 15, валом 16, рычагами 17 и 13. Для блокирования сервомотора от смещения в сторону открытия при различных неисправностях в системе регулирования регулятор содернсит фиксатор 18 выполненный в виде цилиндрического паль ца 1ё неподвижно установленного в цанговом зaжйvIe 2О с приводом 21. Цилиндрический палец 19 включен в прямую меха гаческую связь ограничителя ) открытия через рычаг 22, жестко связанный с валом 10. Таким образом, кинематическая связь фиксатора 18 с зо лотником S обеспечивается через механическую прямую связь ограничителя открытия, а его кинематическая связь с сервомотором 4 осуществляется посредством элементов прямой и обратной связей ограничителя. Для блокирования сервомотора 4 йопользуют следующие элементы кинематических связей ограничителя открытия направляющего аппарата: ычаг 11, тягу 12, рычаг 13, тросовую передачу 14 сектор 15, вал 16 и рычаг 17. С помощью предлагаемого регулятора автоматическое регулирование турбины осуществляется через гидравлическое устройство 1 усиления. В автоматичеоком режиме при перемещении сервсыото ра 4 кинематическая связь от сервомото ра 4 к пальцу 19 обеспЪчивает соответствующее пропорциональное перемещение пальца 19. Таким образом, палец 19 постоянно следит за положением сервомотора 4, и его положение в любой момент соответствует текущему открытию направляющего агшарата. Благодаря подвижности |Пальца 19 сама передача от сервомотора 4 к золотник г 3 оказывается разомкнутой и не воздействует на этот золотник. В момент появления неисправности в системе регулирования, например при потере напряжения питания и др., электрический сигнал поступает на электрогидравлический привод 21, после срабатывания коЛрого палец 19 зажимается цанговым зажимом 2О. С этого момента передача от сервомотора 4 к золотнику 3 замыкается и становится жесткой о&ратной связью между указанными элементами, удерживающей сервомотор 4 в положении, которое он занимал в момент зажатия папьца. Благодаря тому, что цанговым осуществляется фиксация пальца, при которой палец после подачи сигналов о неисправностях в люйых возможных его положениях не может сместиться, блокирование положения направляющего аппарата обеспечивается без наличия зоны, в которой направляющий аппарат может сместиться после фиксации. При указанном блокировании сохраняется возможность управления направляющим аппаратом в зоне от зафиксированного положения до полного закрытия с помощью устройства 1 усиления и редуктора 8. Предлагаемое рещение позволяет по сравнешпо с известным выполнить блокирующее устройство без применения Ьпешшльных кинематических связей фикса тора с сервомотором и золотником, в результате чего упрощается механическая часть регуляторов. Формула изобретени Автоматический регулятор скорости гидротурбины, содержащий гидромеханическое устройство усиления снабженное электрогвдравличесжим преобразователем сигналов управления, ограничитель откры тия направляющего аппарата, соединенный механическими прямой и обратной связями с сервомотором, управляемым при помощи золотника, и сочлененный с последним фиксатор для блокирования положения сервсмотора, отличающий с я тем, что, с целью упрощения конструкции и повыщенда точности блокирования, фиксатор подключен к прямой свя
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1991 |
|
RU2012826C1 |
| Устройство для регулирования гидротурбины | 1974 |
|
SU691596A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЛОПАСТЯМИ РАБОЧЕГО КОЛЕСА ГИДРОТУРБИНЫ | 1996 |
|
RU2106522C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМ ОРГАНОМ ГИДРОТУРБИНЫ | 1995 |
|
RU2100644C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМИ ОРГАНАМИ ГИДРОТУРБИН (ВАРИАНТЫ) | 2018 |
|
RU2710944C1 |
| РЕГУЛЯТОР ГИДРОТУРБИНЫПЦ5 = Д | 1970 |
|
SU426063A1 |
| РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1970 |
|
SU271402A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1971 |
|
SU302490A1 |
| Регулятор скорости поворотно-лопастной гидротурбины | 1974 |
|
SU931942A1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕИСПРАВНОСТИ В РАБОТЕ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО РЕГУЛЯТОРА ПОВОРОТНО-ЛОПАСТНОЙ ГИДРОТУРБИНЫ | 1992 |
|
RU2050462C1 |
