ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области управления системой гидроусилителей регулирующих органов гидротурбин, в частности, к задаче управления системой гидроусилителей регулирующих органов гидротурбин при отказе датчиков положения главного золотника (всех регулирующих органов) или главного сервомотора направляющего аппарата для реактивных гидротурбин и иглы сопла для ковшевой гидротурбины (главного регулирующего сервомотора).
УРОВЕНЬ ТЕХНИКИ
Известно устройство управления регулирующим органом гидротурбины (RU 2100644), которое содержит электрогидравлический преобразователь, соединенный с ним главный золотник, управляющий главным сервомотором, и электрическую обратную связь по положению регулирующего органа, образующие автоматическую часть системы управления. При ручном управлении перекрывается сообщение линии с полостью управления отсечного золотника, и он переходит в положение, при котором отсекается гидравлическая связь между главным управляющим золотником и главным сервомотором. Далее рукояткой золотника ручного управления осуществляют сообщение с соответствующими полостями главного сервомотора и тем самым обеспечивают открытие или закрытие направляющего аппарата.
Недостатком данного устройства является то, что в случае отказа электрического датчика обратной связи главного сервомотора или главного золотника произойдет аварийный останов всего гидроагрегата. Периодические остановы гидроагрегата могут привести к снижению его срока службы, а также к снижению средней эксплуатационной производительности и эффективности.
Кроме того, известен способ управления сервомотором рабочего колеса поворотно-лопастной турбины (RU 2614232) посредством смещения главного золотника от среднего положения, согласно которому определяют текущее положение главного сервомотора. Также определяют величину отклонения текущего положения главного сервомотора от заданного положения. Для формирования задания смещения золотника от среднего положения используют выходной сигнал импульсного трехпозиционного регулятора, входным сигналом для которого является величина отклонения, и сигнал, пропорциональный этой величине. Формируют дополнительный сигнал, пропорциональный превышению уровня указанной величины отклонения текущего положения сервомотора от заданного. В качестве сигнала задания смещения золотника используют сумму дополнительного сигнала и выходного сигнала регулятора.
Недостатком данного способа является то, что при отказе хотя бы одного из датчиков обратной связи, а именно датчика положения главного золотника или датчика положения главного сервомотора рабочего колеса, произойдет аварийный останов гидроагрегата.
Известные системы регулирования гидротурбины, в зависимости от текущего режима, осуществляют регулирование частоты или регулирование мощности за счет изменения положения регулирующих органов. Текущая общепринятая реализация задачи регулирования положения регулирующих органов не позволяет продолжать работу как при отказе датчика положения главного сервомотора, так и при отказе датчика положения главного золотника. На текущий момент отказ измерения приводит к аварийному останову. Любой останов, в том числе и аварийный, это пагубный переходный процесс для подшипников гидроагрегата из-за вращения на неноминальной скорости, износ тормозных колодок и т.п.Также при останове и последующем включении происходит коммутация выключателя генератора, который имеет ограниченный ресурс.
Таким образом, внеплановые остановы гидроагрегата могут привести к снижению срока службы гидроагрегата, штрафным санкциям из-за неучастия в системном регулировании, а также к снижению его средней эксплуатационной производительности и эффективности.
Ввиду имеющихся недостатков устройств и способов управления регулирующих органов гидротурбины технической проблемой, на решение которой направлено создание настоящего изобретения, является создание способа управления регулирующим органами гидротурбин, позволяющего продолжать работу даже при отказе датчиков положения главного золотника или главного сервомотора.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Согласно предлагаемому способу управления регулирующими органами гидротурбин, заключающемуся в исполнении заданного положения главного сервомотора с использованием сигналов датчиков положения главного золотника и главного сервомотора и основывающемуся на сравнениях заданных и измеренных датчиками положений главного золотника и главного сервомотора, отслеживают исправность датчиков положения главного сервомотора. При обнаружении неисправности датчика положения главного сервомотора, формируют сигнал задания для гидрораспределителя контурами регулирования частоты и мощности, соответствующий заданному положению главного золотника, корректируют сигнал задания с учетом сигнала, получаемого с датчика положения главного золотника, и корректируют сигнал задания с использованием коэффициента усиления контура главного золотника, так что обеспечено управление системой гидроусилителей до восстановления измерений датчика положения главного сервомотора.
Согласно еще одному предлагаемому способу управления регулирующими органами гидротурбин, заключающемуся в исполнении заданного положения главного сервомотора с использованием сигналов датчиков положения главного золотника и главного сервомотора и основывающемуся на сравнениях заданных и измеренных датчиками положений главного золотника и главного сервомотора, отслеживают исправность датчиков положения главного золотника. При обнаружении неисправности датчика положения главного золотника формируют сигнал задания для гидрораспределителя контурами регулирования частоты и мощности, соответствующий заданному положению главного сервомотора, корректируют сигнал задания с учетом сигнала, получаемого с датчика положения главного сервомотора, корректируют сигнал задания с использованием коэффициента усиления контура главного сервомотора и корректируют сигнал задания с использованием пропорционально-дифференцирующего звена, так что обеспечено управление системой гидроусилителей до восстановления измерений датчика положения главного золотника.
Предлагаемые способы позволяют достичь технического результата в виде повышения производительности и эффективности гидроагрегата, в состав которого входит система гидроусилителей регулирующих органов гидротурбин, увеличения его срока службы, а также повышения надежности управления регулирующими органами гидротурбин.
В предлагаемом способе управления системой гидроусилителей регулирующих органов гидротурбин при обнаружении неисправности датчика положения главного сервомотора формируют сигнал задания, соответствующий заданному положению главного золотника. Благодаря формированию сигнала задания требуемого приращения положения главного сервомотора контурами регулирования частоты и мощности, соответствующего заданному положению главного золотника, сервомотор будет осуществлять достаточное и устойчивое движение до восстановления измерений датчика положения главного сервомотора. В этом случае корректировка сигнала задания с учетом сигнала, получаемого с датчика положения главного золотника, и корректировка сигнала задания с использованием коэффициента усиления контура главного золотника обеспечивают необходимые характеристики получаемого сигнала для точного управления главным золотником, который в свою очередь осуществляет управление главным сервомотором.
Согласно еще одному предлагаемому способу управления системой гидроусилителей регулирующих органов гидротурбин при обнаружении неисправности датчика положения главного золотника формируют сигнал задания, соответствующий заданному положению главного сервомотора. В этом случае корректируют сигнал задания с использованием пропорционально дифференцирующего звена. Влияние пропорционально дифференцирующего звена на сигнал задания является альтернативным влиянию на него измерений датчика положения главного золотника. Таким образом, корректировка (формирование) сигнала задания с использованием пропорционально дифференцирующего звена позволяет управлять главным сервомотором до восстановления измерений датчика положения главного золотника. Также корректируют сигнал задания с учетом сигнала, получаемого с датчика положения главного сервомотора, и корректируют сигнал задания с использованием коэффициента усиления контура главного сервомотора, что необходимо для управления главным сервомотором. Стоит отметить, что для формирования высокоточного сигнала задания для гидрораспределителя используют контуры регулирования частоты и мощности.
Согласно одному из вариантов реализации дополнительно при обнаружении неисправности датчика положения главногосервомотора или главного золотника корректируют сигнал с использованием балансировки контура главного сервомотора.
Согласно другому варианту реализации дополнительно при обнаружении неисправности датчика положения главного сервомотора или главного золотника корректируют сигнал с использованием балансировки контура главного золотника.
Указанные варианты реализации позволяют повысить точность управления главным сервомотором.
Таким образом, предлагаемые способы позволяют сохранить возможность управления гидротурбиной при отказе датчиков положения главного золотника или главного сервомотора до восстановления их измерений, при этом избегая аварийный останов всего гидроагрегата, что повышает производительность и эффективность гидроагрегата, а также увеличивает его срока службы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность изобретения более подробно поясняется далее с помощью неограничительных примеров его осуществления со ссылками на прилагаемые чертежи, среди которых:
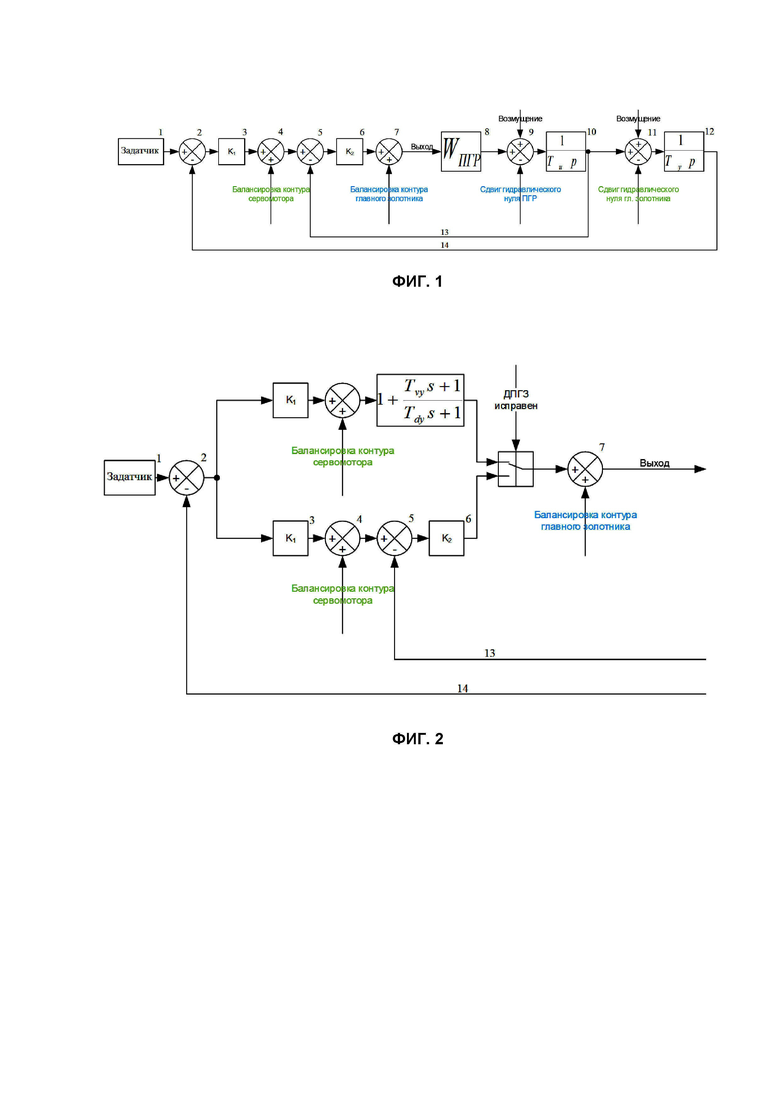
Фиг. 1 - структурная схема при нормальном режиме работы согласно одному из вариантов осуществления изобретения;
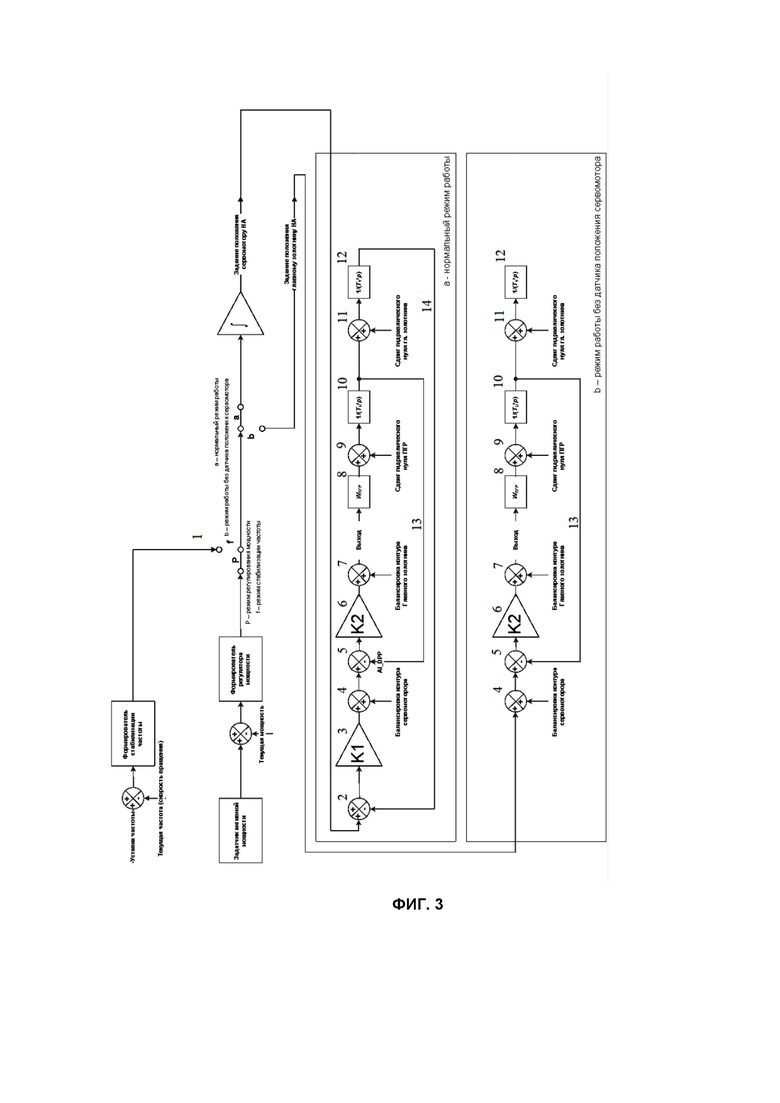
Фиг. 2 - структурная схема в режиме работы при отказе датчика положения главного золотника согласно одному из вариантов осуществления изобретения,
Фиг. 3 - структурная схема в режиме работы при отказе датчика положения главного сервомотора согласно одному из вариантов осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Способ управления регулирующими органами гидротурбин, заключающийся в исполнении заданного положения главного сервомотора с использованием сигналов датчиков положения главного золотника и главного сервомотора и основывающийся на сравнениях заданных и измеренных датчиками положений главного золотника и главного сервомотора в соответствии с настоящим изобретением может быть осуществлен посредством устройства управления, в частности электронного блока управления, реализованного, например, с использованием известных компьютерных или мультипроцессорных систем. В других вариантах реализации заявленный способ может быть реализован посредством специализированных программно-аппаратных средств.
В настоящем описании под термином «пропорциональный гидравлический распределитель» (или «гидрораспределитель», ПГР) понимается устройство, изменяющее расход рабочей жидкости через себя пропорционально входящему электрическому сигналу, поступающему на его вход. Зависимость расхода через гидрораспределитель от входа характеризуется передаточной функцией Wпгр.
Под термином «главный золотник» понимается устройство, изменяющее расход рабочей жидкости через себя пропорционально своему положению. Для управления положением главного золотника на нем установлен вспомогательный сервомотор смещения главного золотника, приводимый в движение расходом через гидрораспределитель.
Под терминами «главный сервомотор» или «главный регулирующий сервомотор» или «главный вспомогательный сервомотор» понимается механизм, приводимый в движение расходом рабочей жидкости через главный золотник. При этом, гидротурбина может иметь два главных сервомотора и только один из них будет главным регулирующим сервомотором. Главным регулирующим сервомотором является главный сервомотор направляющего аппарата для реактивных гидротурбин и иглы сопла для ковшевой гидротурбины. Второй главный сервомотор при этом будет вспомогательным. Стоит отметить, что предлагаемый способ описывает управление при отказе датчика положения главного регулирующего сервомотора. Также важно отметить, что предлагаемый способ описывает управление при отказе датчика положения главного золотника, управляющего как главным регулирующим сервомотором, так и главным вспомогательным сервомотором.
Таким образом, в настоящем раскрытии под термином «главный сервомотор» понимается как главный регулирующий сервомотор, так и главный вспомогательный сервомотор.
Для определенности все сигналы считают напряжениями постоянного тока.
На фиг. 1 изображена структурная схема при нормальном режиме работы. На данной схеме показан набор элементов для реализации управления главным сервомотором в нормальном режиме работы. Элементы на схеме подключены последовательно согласно порядку их перечисления, указанному ниже. В набор элементов входит устройство управления, которое содержит задатчик 1, выдающий сигнал задания (требуемого положения) для главного сервомотора. Задатчик 1 связан с выявителем 2 рассогласования между заданным и фактическим положением главного сервомотора направляющего аппарата. Также в устройство управления входит усилитель 3 сигнала рассогласования, блок 4 балансировки контура главного сервомотора, выявитель 5 рассогласования между заданным и фактическим смещением главного золотника от среднего положения, усилитель 6 сигнала рассогласования, блок балансировки 7 контура главного золотника. Также в набор элементов входит объект управления, который содержит пропорциональный гидравлический распределитель 8 (гидрораспределитель) с влиянием сдвига 9 гидравлического нуля относительно своего среднего положения, главный золотник 10 с влиянием сдвига 11 гидравлического нуля относительно своего среднего положения и главный сервомотор 12. В нормальном режиме работы исправно выполняются измерения датчиками положения главного золотника и главного сервомотора, являющиеся сигналами обратной связи. Датчик положения главного золотника связан с выявителем 5 образует обратную связь 13, а датчик положения главного сервомотора связан с выявителем 2 образует обратную связь 14.
При обнаружении неисправности датчика положения главного золотника выполняется следующая последовательность операций. Способ управления при отказе датчика положения главного золотника проиллюстрирован на фиг. 2.
Сигналы задания с задатчика 1 и датчика положения главного сервомотора поступают на входы выявителя 2 рассогласования, сигнал на выходе которого равен разности сигналов задатчика и упомянутого датчика положения.
При обнаружении того, что измерения с датчика положения главного золотника отсутствуют и не поступают на выявитель 5, согласно настоящему изобретению происходит безударный переход на резервную схему регулятора, не использующую отсутствующее измерение. А именно, подключают последовательно пропорционально-дифференцирующее звено (ПД-звено) и пропорциональное звено (П-звено) в прямой канал управления вместо выявителя 5 и усилителя 6, причем П-звено можно совместить с коэффициентом усиления контура главного сервомотора (фиг. 2).
Таким образом, полученный сигнал рассогласования усиливается путем использования коэффициента усиления контура главного сервомотора (К1). Усиленный сигнал поступает на вход блока балансировки контура главного сервомотора. Балансировка контура главного сервомотора это постоянная величина, компенсирующая сдвиг гидравлического нуля главного золотника. Далее полученный сигнал с блока балансировки главного сервомотора поступает на вход ПД-звена, где с использованием постоянной времени дифференцирования ПД-звена (Tvy) и постоянной времени демпфирования ПД-звена (Tdy) формируется сигнал, способный обеспечить устойчивость системы. Дополнительно полученный сигнал пропускают через блок 7 балансировки контура главного золотника.
При обнаружении неисправности датчика положения главного регулирующего сервомотора выполняется следующая последовательность операций. Способ управления при отказе датчика положения главного сервомотора проиллюстрирован на фиг. 3.
Важно отметить, что для получения сигнала задания в устройстве управления интегрируются приращения, формируемые задатчиком, контурами регулирования частоты и мощности (фиг. 3). Сигнал текущей частоты (или скорости вращения) поступает с измерителя-преобразователя, определяющего длительность импульсов с датчика приближения на зубчатом колесе вала гидроагрегата и длительность полупериода сигнала с тахогенератора гидроагрегата. Сигнал текущей мощности поступает с измерителя-преобразователя электрических параметров, использующего токи и напряжения с измерительных трансформаторов. Таким образом, в режиме стабилизации частоты (f) регулятор частоты воздействует, например на направляющий аппарат для реактивной гидротурбины или на иглу сопла для ковшевой гидротурбины, через главный регулирующий сервомотор (изменяя механический момент гидротурбины за счет изменения расхода воды) для поддержания текущей частоты, равной уставке частоты. Аналогично, в режиме регулирования мощности (Р) регулятор мощности воздействует через главный регулирующий сервомотор (изменяя механический момент гидротурбины за счет изменения расхода воды) для поддержания текущей мощности, равной заданной мощности (фиг. 3).
В настоящем изобретении в режиме работы системы управления, когда датчик положения главного регулирующего сервомотора осуществляет измерения, сигнал задания формируют для главного регулирующего сервомотора, а при отказе датчика положения главного регулирующего сервомотора сигнал задания формируют для главного золотника. Другими словами, при отказе датчика положения главного регулирующего сервомотора выдают требуемые приращения для главного регулирующего сервомотора в качестве сигнала задания положения главного золотника, при этом главный регулирующий сервомотор будет осуществлять достаточное и устойчивое интегрирование за счет свойства объекта управления.
Таким образом, сигнал задания поступает на вход блока 4 балансировки контура главного сервомотора. Полученный сигнал и сигнал с датчика положения главного золотника поступают на входы выявителя 5 рассогласования, сигнал на выходе которого равен разности сигнала, полученного с блока 4 балансировки и упомянутого датчика положения главного золотника. Сигнал с выхода выявителя 5 усиливается в усилителе 6 путем использования коэффициента усиления контура главного золотника. Дополнительно, усиленный сигнал пропускают через блок 7 балансировки контура главного золотника (фиг. 3). Сигнал, полученный предложенным способ в соответствии с настоящим изобретением, способен обеспечить устойчивость системы.
В обоих случаях, при использовании резервной схемы управления, сигнал поступает на выход устройства управления и попадает на вход гидрораспределителя с влияением сдвига 9 гидравлического нуля, который определяет различие между измеренным средним положением и положением, где достигается нулевой расход через гидрораспределитель. Расход через гидрораспределитель вызывает перемещение главного золотника с влиянием сдвига 11 гидравлического нуля, который определяет различие между измеренным средним положением и положением, где достигается нулевой расход через главный золотник. Расход через главный золотник вызывает перемещение главного сервомотора.
Предложенные резервные схемы в соответствии с настоящим способом управления используют до момента восстановления измерения датчиками положения главного золотника и главного сервомотора. С учетом запаса на нелинейность гидравлической системы, а также с использованием цифровой системы управления, можно обеспечить свойства в части устойчивости и быстродействия, достаточные для работы в течение продолжительного времени.
В качестве примера далее рассмотрен случай при отказе датчика положения главного золотника. Передаточная функция линеаризованной разомкнутой системы в соответствии с теорией автоматического управления (ТАУ) определяется как:

где WПГР - передаточная функция, определяющая зависимость расхода через гидрораспределитель от его входа, К1 - коэффициент усиления контура главного сервомотора, К2 - коэффициент усиления контура главного золотника, Tu - постоянная времени интегрирования главного золотника, определяющая зависимость между расходом через гидрораспределитель и скоростью изменения положения главного золотника, Ту - постоянная времени интегрирования главного золотника, определяющая зависимость между расходом через главный золотник и скоростью изменения положения главного сервомотора, s - оператор дифференцирования (p аналогичен s).
В качестве примера, сдвиги гидравлических нулей и балансировки отсутствуют и приняты равными нулю, т.к. это не влияет на расчет устойчивости и быстродействия. Также, в качестве примера, параметры будут равны: К1 = 1,5, К2 = 95,0, Tu = 0,25 с, Ту = 12 с. В соответствии с ТАУ, параметры, определяющие устойчивость и быстродействие системы будут равны: запас по фазе 45°, запас по амплитуде более 40 Дб, постоянная времени системы 175 мс. Согласно ТАУ, замкнутая система устойчива.
Далее описана проверка свойств системы при отсутствии датчика положения главного золотника. Передаточная функция разомкнутой системы без замыкания контура главного золотника определяется как:

Согласно ТАУ, этот контур при замыкании обратной связью не может быть устойчив.
При реализации предложенного способа управления при отказе датчика положения главного золотника передаточная функция будет выглядеть как:

где Tvy - постоянная времени дифференцирования ПД-звена коррекции, Tdy - постоянная времени демпфирования ПД-звена коррекции.
Также в качестве примера, параметры в соответствии с реальным объектом управления будут равны: К2 = 9,5, Tvy = 0,35 с., Tdy = 1,75 с. В соответствии с ТАУ, параметры, определяющие устойчивость и быстродействие системы равны: запас по фазе 75°, запас по амплитуде более 40 Дб, постоянная времени системы 153 мс. Таким образом, замкнутая система устойчива. Предлагаемый способ тестировался на промышленном объекте «Шульбинская ГЭС», гидротурбина типа ПЛ50-В-850 с колонкой управления типа ЭГРК-150-4.
Стоит отметить, что достаточное количество отказов датчиков положения происходит из-за обрыва измерительной цепи, обрыва питания, а также механической поломки шарниров и тяг их механизмов, что приводит к аварийному останову гидроагрегата. Однако неисправность датчиков положения определяет только неисправность системы управления (регулирования). В настоящем изобретении для определения отказа датчиков положения предусмотрена одна система защиты, а от аварийного случая, который требует останова всего гидроагрегата, предусмотрена другая система защиты. При этом, при сохранении управляемости главными сервомоторами в соответствии с предложенным способом система защиты продолжает действовать (например, система защиты продолжает защищать гидротурбину от разгона) и может обеспечивать безопасный останов без возникновения аварийной ситуации.
Также стоит отметить, что в других вариантах реализации, в которых требуется система управления со сравнительно меньшей точностью управления, возможно обеспечение управления главным сервомотором направляющего аппарата в соответствии с предложенным способом в постоянном виде, т.е. всегда в отсутствии какого-либо из датчиков. В случае одновременного отказа датчиков положения главного золотника (при наличии главного золотника и двух контуров управления) и главного сервомотора управление системой невозможно.
Возможными областями применения настоящего изобретения является использование его для основного регулирующего органа, например, для направляющего аппарата реактивных турбин, иглы сопла для ковшевых турбин, а также для основного регулирующего органа в гидротурбинах с двумя регулирующими органами.
Также предлагаемый способ управления при отказе датчика положения главного золотника является применимым для главного вспомогательного сервомотора гидротурбины с двумя регулирующими органами, например поворотно-лопастная, диагональная или ковшевая турбины. Применение предлагаемого способа управления при отказе датчика положения главного регулирующего сервомотора невозможно и не считается нужным для главного вспомогательного сервомотора гидротурбины с двумя регулирующими органами, т.к. этот случай не является аварийным.
Также стоит отметить, что при обнаружении неисправности датчика положения главного регулирующего сервомотора для одноконтурных систем регулирования (т.е. без главного золотника), сигнал задания положения главного золотника может непосредственно передаваться на гидрораспределитель. В этом случае формируемый сигнал задания не корректируется.
Настоящее изобретение не ограничено конкретными вариантами реализации, раскрытыми в описании в иллюстративных целях, и охватывает все возможные модификации и альтернативы, входящие в объем настоящего изобретения, определенный формулой изобретения.
Группа изобретений относится к области управления системой гидроусилителей регулирующих органов гидротурбин. В способе управления регулирующими органами гидротурбин, заключающемся в исполнении заданного положения главного сервомотора с использованием сигналов датчиков положения главного золотника и главного сервомотора и основывающемся на сравнениях заданных и измеренных датчиками положений главного золотника и главного сервомотора, отслеживают исправность датчика положения главного сервомотора. При обнаружении неисправности датчика формируют сигнал задания для гидрораспределителя контурами регулирования частоты и мощности, соответствующий заданному положению главного золотника. Корректируют сигнал задания с учетом сигнала, получаемого с датчика. Корректируют сигнал задания с использованием коэффициента усиления контура главного золотника, так что обеспечено управление системой гидроусилителей до восстановления измерений датчика. Группа изобретений направлена на повышение производительности и эффективности гидроагрегата, в состав которого входит система гидроусилителей регулирующих органов гидротурбин, а также на увеличение его срока службы. 2 н. и 4 з.п. ф-лы, 3 ил.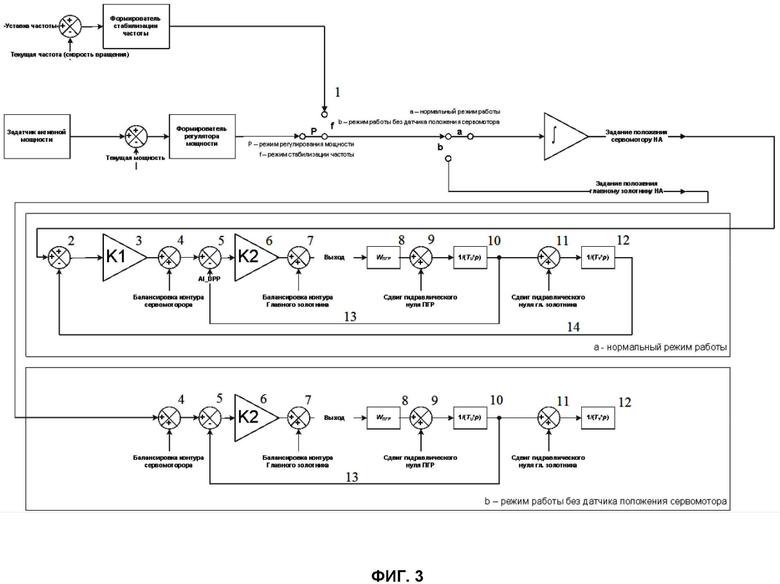
1. Способ управления регулирующими органами гидротурбин, заключающийся в исполнении заданного положения главного сервомотора с использованием сигналов датчиков положения главного золотника и главного сервомотора и основывающийся на сравнениях заданных и измеренных датчиками положений главного золотника и главного сервомотора, отличающийся тем, что
отслеживают исправность датчика положения главного сервомотора, причем
при обнаружении неисправности датчика положения главного сервомотора
формируют сигнал задания для гидрораспределителя контурами регулирования частоты и мощности, соответствующий заданному положению главного золотника,
корректируют сигнал задания с учетом сигнала, получаемого с датчика положения главного золотника, и
корректируют сигнал задания с использованием коэффициента усиления контура главного золотника, так что обеспечено управление системой гидроусилителей до восстановления измерений датчика положения главного сервомотора.
2. Способ по п. 1, согласно которому дополнительно при обнаружении неисправности датчика положения главного сервомотора корректируют сигнал задания с использованием балансировки контура главного сервомотора.
3. Способ по п. 1, согласно которому дополнительно при обнаружении неисправности датчика положения главного сервомотора корректируют сигнал задания с использованием балансировки контура главного золотника.
4. Способ управления регулирующими органами гидротурбин, заключающийся в исполнении заданного положения главного сервомотора с использованием сигналов датчиков положения главного золотника и главного сервомотора и основывающийся на сравнениях заданных и измеренных датчиками положений главного золотника и главного сервомотора, отличающийся тем, что
отслеживают исправность датчика положения главного золотника, причем
при обнаружении неисправности датчика положения главного золотника
формируют сигнал задания для гидрораспределителя контурами регулирования частоты и мощности, соответствующий заданному положению главного сервомотора,
корректируют сигнал задания с учетом сигнала, получаемого с датчика положения главного сервомотора,
корректируют сигнал задания с использованием коэффициента усиления контура главного сервомотора и
корректируют сигнал задания с использованием пропорционально-дифференцирующего звена, так что обеспечено управление системой гидроусилителей до восстановления измерений датчика положения главного золотника.
5. Способ по п. 4, согласно которому дополнительно при обнаружении неисправности датчика положения главного золотника корректируют сигнал задания с использованием балансировки контура главного сервомотора.
6. Способ по п. 4, согласно которому дополнительно при обнаружении неисправности датчика положения главного золотника корректируют сигнал задания с использованием балансировки контура главного золотника.
| Способ управления сервомотором рабочего колеса поворотно-лопастной турбины | 2014 |
|
RU2614232C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМ ОРГАНОМ ГИДРОТУРБИНЫ | 1995 |
|
RU2100644C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЛОПАСТЯМИ РАБОЧЕГО КОЛЕСА ГИДРОТУРБИНЫ | 1996 |
|
RU2106522C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАПРАВЛЯЮЩИМ АППАРАТОМ ГИДРОТУРБИНЫ | 1985 |
|
SU1351295A1 |
| CN 106768922 A, 31.05.2017 | |||
| Способ получения производных 4-ацетокси-3-оксиэтилазетидин-2-она (его варианты) | 1985 |
|
SU1442071A3 |

