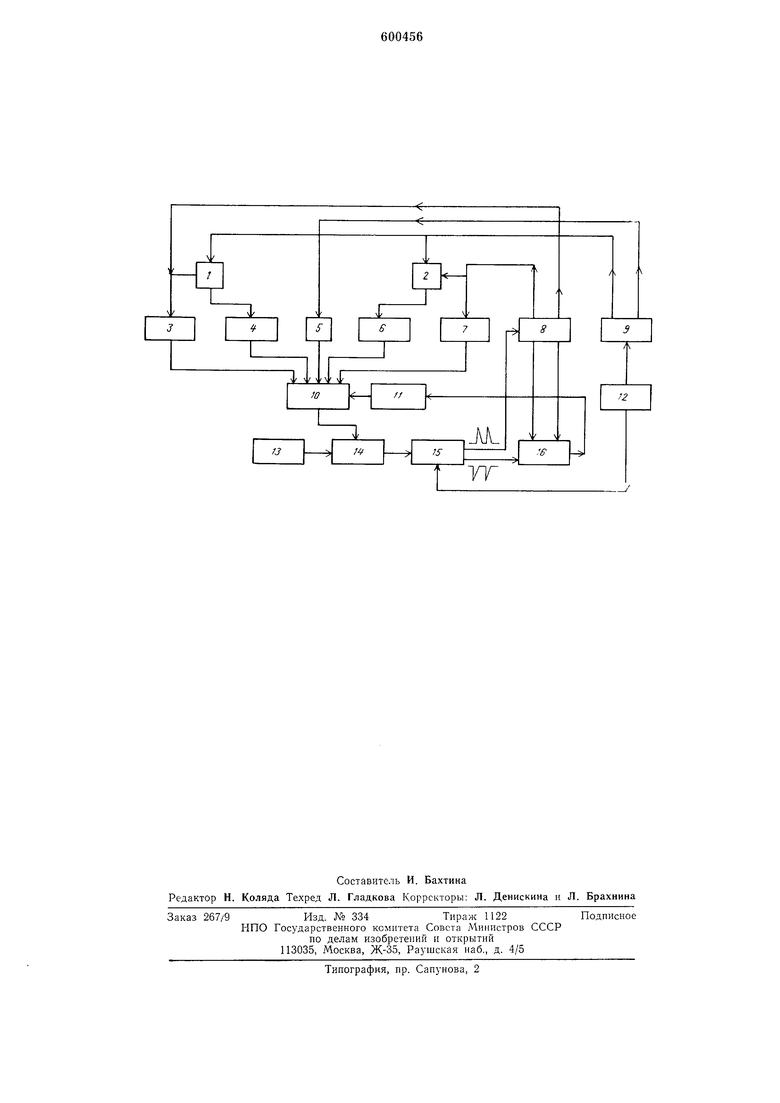
нос Боздсйствпс, т. е. при его срабатывании модуляционное чрмращенпе регулируемого параметра становится равным нулю. Уравновешивание мостовой измерительной цени 14 осуществляется регулировкой нараметра 11. Сумматор 10 суммирует воздействия от модулирующих элементов 3-7 и регулируемого параметра 11. Дискретное изменение иараметра 11 осуществляется блоком уравновешивания 16. Нанравленне этой регулировки уравновешивающего нараметра определяет триггер реверса 8. Триггер реверса 8 управляет также модулирующими элементами 3 и 7 и логическими схемами 1 и 2. Экстремум-детектор 15 в соответствин с состоянием измерительиой цепи 14 формирует но модуляционным воздействиям ноложнтельные или отрицательные имиульсы. Положительные имнульсы ностунают на триггер реверса 8 и вызывают его нереброс в другое состояние, а отрицательные- на блок уравновешивания 16 и вызывают изменение регулируемого параметра 11 в направлении уравновешнвация. Ритм работы .моста задает тактовый генератор 12.
Уравновешиванне моста но предлагаемому способу происходит следующим образом. Пусть триггер реверса 8 иаходится в состоянии, при котором регулировка параметра И будет осуществляться в положительном наиравленин (увеличение). При этом будет включен элемент 7, осуществляющий отрицательное модуляциониое воздействие на -k шагов дискретности, и будет открыта схема совпадения 2. Очередное срабатывацие тактового генератора 12 вызовет запуск кипп-реле 9, которое через схему 2 включит модулирующий элемент 6, осуществляющий модуляционное воздействие на () шагов дискретности. Следовательно, будет осуществлена модуляцня от приращения -k, нротивоноложного направлению уравновешивания, к приращению 2k- -n-k k-{-n, совпадающему с нанравлением уравновешнваиня. Если такое модуляционное воздействие вызовет уменьшение амнлитуды выходного ианряже)П1Я мостовой измерительиой цени 14, то экстремум-детектор 15 выдаст отрицательный имнульс, который ностуиит на блок уравновешивания 16 и вызовет увеличение регулируемого нараметра 11 на одни шаг. Затем такие циклы будут новторяться до достижения равиовесия по данному параметру.
Если при рассмотрении модуляционных воздействий нроизойдет увеличение амплитуды выходного папряжеиня мостовой измерительной цеин 14, то экстремум-детектор 15 выдаст положительиый имнульс, который опрокинет триггер реверса 8 в другое состоянпе. Направление регулировки уравиовешивающего нараметра 11 н паправлеиня модуляциоппых воздействий нзме1 ятся на противоположные. Теперь включится модулирующий элемент 3,
осуществляющ П1 модуляционное воздействие на шагов дискретности, и откроется схема совнадеинй 1. Прн очередном срабатывании тактового генератора 12 теиерь кипп-реле 9 через схему сонпадепий 1 включит модулирующий элемент 4, осуществляющий модуляционное воздействие иа -(.) щагов дискретности. Следовательно, осуществится модл ляция от +й до -(/г+«) шагов дискретности. Экстремум-детектор 15 выдает отрицательпый импульс на блок уравновешивания 16, и уравновешивание нрибора будет происходить апалогичпо предыдушему.
Модулирующий элемепт 5 срабатывает при
переходе на регулировку другого уравновешиваюшего нараметра.
Увелнченне чувствительности ирн таком снособе уравновешнваиия нроисходит за счет существенного увеличения величины модуляционного воздействия, равного 2k-}-n щагов днскретности, а также за счет того, что это воздействие осуществляется на более крутом участке нередаточной характеристнки мостовой измерительной цени. Максимальное значенне ногрешности уравновешнвания ири этом не превышает половины разпости положительного и отрицательного модуляциоцных воздействий.
Формула изобретения
Способ уравновешивания цифровых модуляционных экстремальных мостов иеремецпого тока по двум дискретно регулируемым параметрам с помощью периодических импульсиых регулирующих воздействий, при котором для формирования каждого импульса регулирующего воздействия производят пробпое скачкообразное изменение соответствующего нараметра мостовой измерительной цеци с иоследующим приведением моста к равновеCHJo, отлнчающийся тем, что, с целью иовышения чувствительности и улучшения сходимости мостов, пробное скачкообразное
3 изменение соответствующего нараметра мостовой измерительной цени осуществляют от его ирнращення, равного k шагам дискретности и иротивоиоложного нанравлеиню регулнрования уравновешнвающего параметра, к
0 приращению, равному k-}-l шагам дискретиости и совпадающему с наиравлением регулироваиия уравиовешиваюшего нараметра, причем иробное скачкообразное изменение соответствующего параметра мостовой измери5 тельиой пени выбирают равным величине п, которая связана с шагом дпскретностн выражением п 2/г+1.
1Тсточ)шки информации, принятые во внимание нри экспертизе
1. Ф. Б. Грииевнч. Автоматические .мосты иеременного тока, Новосибирск, РИО, Сиб. отд. ЛИ СССР, 1964, с. 115.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока и устройство для его осуществления | 1985 |
|
SU1312490A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока | 1981 |
|
SU970238A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока | 1982 |
|
SU1026063A1 |
| Цифровой модуляционный экстремальный мост переменного тока | 1974 |
|
SU708241A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока | 1978 |
|
SU748256A1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ МОДУЛЯЦИОННЫХ ЭКСТРЕМАЛЬНЫХ МОСТОВ ПЕРЕМЕННОГО ТОКА | 1971 |
|
SU313163A1 |
| Квазимодуляционный автоматический мост переменного тока | 1983 |
|
SU1118923A1 |
| Цифровой экстремальный мост переменного тока | 1987 |
|
SU1479882A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |