Изобретение относится к электротехнике, а именно к способам регулирования тягового усилия магнитного привода, и может быть применено в любых механизмах с перемещающимися звеньями в качестве привода, тормоза, фиксирующего устройства, амортизатора, вибропривода и т.д.
Известна магнитная система привода, содержащая неподвижный магнитопровод с постоянными магнитами, в которой якорем является другой постоянный магнит, установленный так, что имеет возможность перемещаться в плоскости, ортогональной силовым линиям постоянного магнита, и каждый полюс якоря находится в немагнитном зазоре, в котором находится разноименный с ним полюс постоянного магнита, закрепленного на магнитопроводе. Изменение тягового усилия магнитной системы может быть осуществлено изменением площади поперечного сечения магнитов (RU, ав. св. №972636, Н02К 33/02, H01F 7/13).
Недостатком данной магнитной системы является невозможность непрерывного регулирования тягового усилия во время перемещения якоря в зазоре.
Наиболее близким способом регулирования тягового усилия якоря магнитного привода является способ, описанный в магнитной системе привода с регулируемым тяговым усилием, содержащий магнитопровод с постоянным магнитом, образующий по крайней мере один немагнитный зазор с якорем, в котором регулирование тягового усилия магнитной системы осуществляется путем изменения количества дополнительных магнитов, изменением расстояния между ними и/или изменением их сечения (RU, патент №2263361, 7 H01F 7/13, Н01Н 3/20).
Недостатком известного способа является невозможность непрерывного регулирования тягового усилия при воздействии внешнего приложенного к якорю усилия, так как для каждого заданного тягового усилия необходимо вносить изменения в конструкцию устройства.
Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей силовых устройств за счет непрерывного регулирования тягового усилия магнитного привода при воздействии внешнего приложенного к якорю усилия.
Указанный результат достигается тем, что в известном способе регулирования тягового усилия магнитного привода, включающем перемещение магнитной системы якоря относительно магнитной системы магнитопровода ортогонально линиям магнитного поля, согласно изобретению, тяговое усилие регулируют поворотом магнитной системы якоря вокруг своей оси относительно магнитной системы магнитопровода. Магнитные системы могут быть образованы постоянными магнитами и/или электромагнитами.
При этом величина тягового усилия пропорциональна величине угла поворота якоря и определяется из математической зависимости:
Fα=Fo(360-2nα)/360 при условии 360/n≥2nα≥0, где
α - угол разворота магнитной системы якоря относительно магнитопровода, град;
n - число полюсов по окружности магнитной системы якоря;
Fo - сила, необходимая для осевого перемещения магнитной системы якоря, когда силы магнитного сопротивления минимальны (α=0);
Fα - сила, необходимая для осевого перемещения магнитной системы якоря, при заданном угле α.
Сущность изобретения поясняется чертежами.
На фиг.1 изображен общий вид силового устройства, с помощью которого осуществляется заявляемый способ.
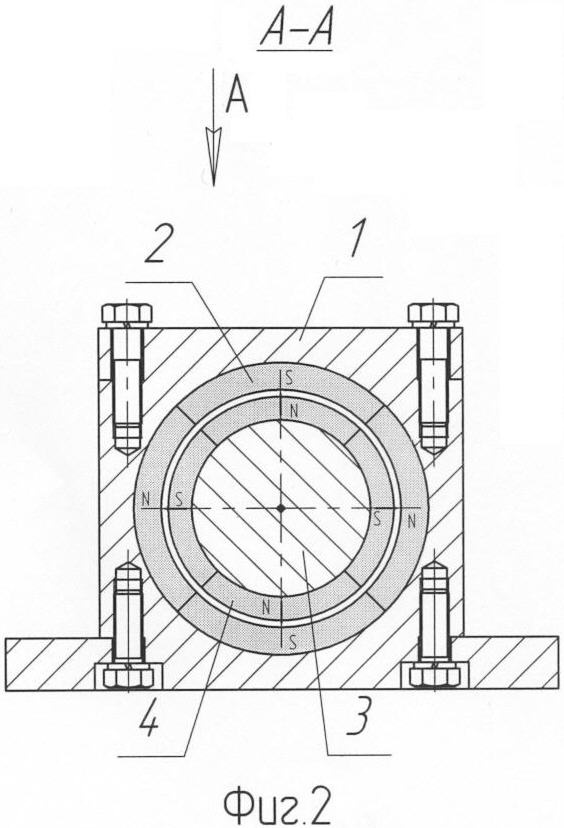
На фиг.2 - разрез А-А на фиг.1;
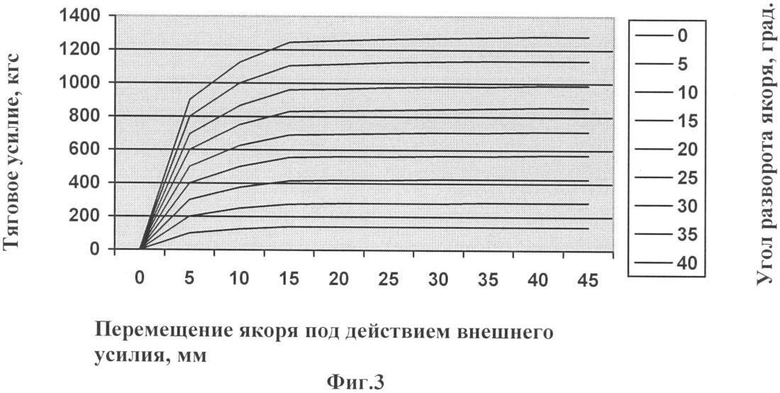
На фиг.3 - график зависимости тягового усилия якоря от угла его разворота при воздействии внешнего усилия.
Устройство для осуществления способа содержит магнитную систему магнитопровода, включающую магнитопровод 1, являющийся корпусом магнитного привода. На внутренней цилиндрической поверхности магнитопровода 1 расположены постоянные магниты 2. На магнитопроводе установлены опоры, поддерживающие магнитную систему якоря, включающую якорь 3, представляющий собой цилиндрический вал из магнитомягкой стали, на наружной поверхности которого расположены постоянные магниты 4.
Работа в системе совершается при перемещении магнитной системы якоря 3 относительно магнитной системы магнитопровода 1 в зазоре под действием внешнего приложенного к якорю 3 усилия.
Регулирование тягового усилия магнитного привода осуществляется путем поворота магнитной системы якоря вокруг своей оси на заданный угол, создавая вращающий момент, достаточный для преодоления силы магнитного взаимодействия разнополярных пар полюсов и сил магнитного сопротивления униполярных пар полюсов магнитных систем магнитопровода и якоря, смещающихся при развороте магнитной системы якоря. Для создания вращающего момента могут применяться различные устройства, например: шаговый электродвигатель, электрический или механический приводы, рычажная передача и т.д. В момент, когда силы магнитного взаимодействия становятся меньше сил сопротивления, магнитная система якоря перемещается вдоль своей оси, замыкая магнитный поток магнитных систем якоря и магнитопровода разнополярными полюсами. Ход магнитной системы якоря соответствует осевой длине полюсов магнитных систем якоря и магнитопровода.
Заявляемый способ пояснен графиком (фиг.3) зависимости тягового усилия якоря от угла его разворота при воздействии внешнего усилия.
График построен на основании эмпирических данных, полученных с помощью динамометра ДОСМ-3-30У при измерениях, осуществленных на опытном образце. Согласно этого графика, например, требуемое тяговое усилие 1200 кг достигается при повороте якоря на угол 10°.
Преимущества заявляемого способа в сравнении с ближайшим аналогом заключаются в осуществлении непрерывного регулирования тягового усилия без внесения изменений в конструкцию магнитной системы привода.
Кроме того, заявляемый способ позволяет расширить функциональные возможности магнитной системы привода за счет непрерывного регулирования тягового усилия, что позволяет значительно расширить область применения магнитной системы привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНАЯ СИСТЕМА ПРИВОДА С РЕГУЛИРУЕМЫМ ТЯГОВЫМ УСИЛИЕМ | 2003 |
|
RU2263361C2 |
| Электрическая машина с возбуждением от постоянных магнитов | 1987 |
|
SU1495940A1 |
| Магнитная система привода | 1973 |
|
SU920974A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УГЛА ВРАЩАЮЩЕГОСЯ РОТОРА ГИРОСКОПА | 1979 |
|
RU2107261C1 |
| МАГНИТНАЯ СИСТЕМА ПРИВОДА | 2010 |
|
RU2461904C2 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2013 |
|
RU2545163C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2009 |
|
RU2454774C9 |
| Регулятор давления | 1978 |
|
SU873216A1 |
| СИНХРОННЫЙ ГЕНЕРАТОР С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2004 |
|
RU2273942C1 |
Изобретение относится к области электротехники. Техническим результатом является расширение функциональных возможностей силовых устройств за счет непрерывного регулирования тягового усилия магнитного привода при воздействии внешнего приложенного к якорю усилия. Технический результат достигается тем, что в способе регулирования тягового усилия магнитного привода, включающем перемещение магнитной системы якоря относительно магнитной системы магнитопровода ортогонально линиям магнитного поля, тяговое усилие регулируют поворотом магнитной системы якоря вокруг своей оси относительно магнитной системы магнитопровода. Магнитные системы могут быть образованы постоянными магнитами и/или электромагнитами. При этом величина тягового усилия пропорциональна величине угла поворота якоря и определяется из математической зависимости: Fα=Fo(360-2nα)/360 при условии 360/n≥2nα≥0, где α - угол разворота магнитной системы якоря относительно магнитопровода, град, n - число полюсов по окружности магнитной системы якоря; Fo - сила, необходимая для осевого перемещения магнитной системы якоря, когда силы магнитного сопротивления минимальны (α=0); Fα - сила, необходимая для осевого перемещения магнитной системы якоря, при заданном угле α. 3 ил.
Способ регулирования тягового усилия якоря магнитного привода, включающий перемещение магнитной системы якоря относительно магнитной системы магнитопровода ортогонально силовым линиям магнитного поля, отличающийся тем, что тяговое усилие регулируют поворотом магнитной системы якоря относительно магнитной системы магнитопровода вокруг своей оси, причем величина тягового усилия пропорциональна величине угла поворота магнитной системы якоря и определяется из математической зависимости
Fα=Fo(360-2nα)/360 при условии 360/n≥2nα≥0, где
α - угол разворота магнитной системы якоря относительно магнитопровода, град;
n - число полюсов по окружности магнитной системы якоря;
Fα - сила, необходимая для осевого перемещения магнитной системы якоря, при заданном угле α;
Fo - сила, необходимая для осевого перемещения магнитной системы якоря, когда силы магнитного сопротивления развороту якоря минимальны.
| МАГНИТНАЯ СИСТЕМА ПРИВОДА С РЕГУЛИРУЕМЫМ ТЯГОВЫМ УСИЛИЕМ | 2003 |
|
RU2263361C2 |
| Магнитная система привода | 1978 |
|
SU972636A2 |
| Магнитная система привода | 1973 |
|
SU920974A1 |
| Привод дополнительного моста транспортного средства | 1980 |
|
SU901095A1 |
| Средство для гигиены полости рта | 2021 |
|
RU2760268C1 |
| US 2896043 A, 21.07.1959 | |||
| ЩУЧИНСКИЙ С.Х | |||
| Электромагнитные приводы исполнительных механизмов | |||
| - М.: Энергоатомиздат, 1984, с.64, 65, 66, рис.17а, 17б | |||
| КАЗАКОВ Л.А | |||
| Электромагнитные устройства РЭА | |||
| Справочник | |||
| - М.: Радио и связь, 1991, 312, 313. | |||

